") 飛凌RK3568開發(fā)板實時系統(tǒng)來啦!實時性,更強大
飛凌RK3568開發(fā)板實時系統(tǒng)來啦!實時性,更強大
內容來源:飛凌嵌入式官網(wǎng)
在工業(yè)4.0時代,人工智能和工業(yè)物聯(lián)網(wǎng)的發(fā)展走上了快車道,越來越多的行業(yè)對實時操作系統(tǒng)有了更加迫切的需求。基于此,飛凌嵌入式推出了在OK3568-C開發(fā)板上運行的實時操作系統(tǒng),本文中小編將為大家介紹飛凌嵌入式在OK3568-C開發(fā)板上實現(xiàn)實時性的方式,以及實時內核的效果測試。
 飛凌OK3568-C開發(fā)板
飛凌OK3568-C開發(fā)板1、為什么選擇實時操作系統(tǒng) ?
我們都知道,操作系統(tǒng)可以分為實時操作系統(tǒng)和分時操作系統(tǒng)。分時操作系統(tǒng)其實就是將系統(tǒng)處理機時間與內存空間按一定的時間間隔輪流地切換給各終端用戶的程序使用。目前市面上絕大多數(shù)板卡上運行的Linux系統(tǒng)都是分時操作系統(tǒng)。
但是隨著自動駕駛、智能機器人等行業(yè)的興起,對板載操作系統(tǒng)的實時性也提出了更高的要求。這時候,分時系統(tǒng)就無法滿足某些對實時性要求較高的行業(yè)的需求了,必須對Linux系統(tǒng)進行改進,使其具有更好的實時性,以順應行業(yè)的發(fā)展。
例如無人駕駛技術,系統(tǒng)需要根據(jù)復雜的路況情況及時做出分析判斷,做出反應,執(zhí)行剎車或變道操作;又比如車載安全氣囊,在遇到突發(fā)事故時,系統(tǒng)必須第一時間做出反應彈出安全氣囊,保護車內乘客人身安全。這些實際應用場景都離不開實時操作系統(tǒng)。
2、如何實現(xiàn)“實時性” ?
Linux系統(tǒng)可以采用打補丁的方式來實現(xiàn)“實時性”。RT-Linux就是在Linux的基礎上加入了一個實時補丁,從而將Linux改進成實時操作系統(tǒng)。簡單地說,“實時補丁”的主要工作就是針對Linux系統(tǒng)的優(yōu)先級倒置、自旋鎖等問題進行改進,以達到實時操作系統(tǒng)的要求。
基于這個思路,我們就可以通過對內核打實時補丁的方法讓OK3568-C開發(fā)板上的Linux系統(tǒng)滿足實時性的需求。
飛凌提供了兩個補丁文件:
0001-patch-patch-4.19.206-rt87.patch-fix-kernel-sched-cor.patch
0002-fix-kernel-sched-core.c.patch
將兩個補丁文件拷貝到源碼/OK3568-linux-source/kernel路徑下,執(zhí)行以下命令:
patch-p1 <0001-patch-patch-4.19.206-rt87.patch-fix-kernel-sched-cor.patch
patch-p1 < 0002-fix-kernel-sched-core.c.patch
然后,在源碼執(zhí)行./build.sh kernel命令,即可在/OK3568-linux-source/kernel目錄下生成boot.img鏡像文件。
客戶也可以直接單步燒寫飛凌制作完成的boot.img鏡像文件。
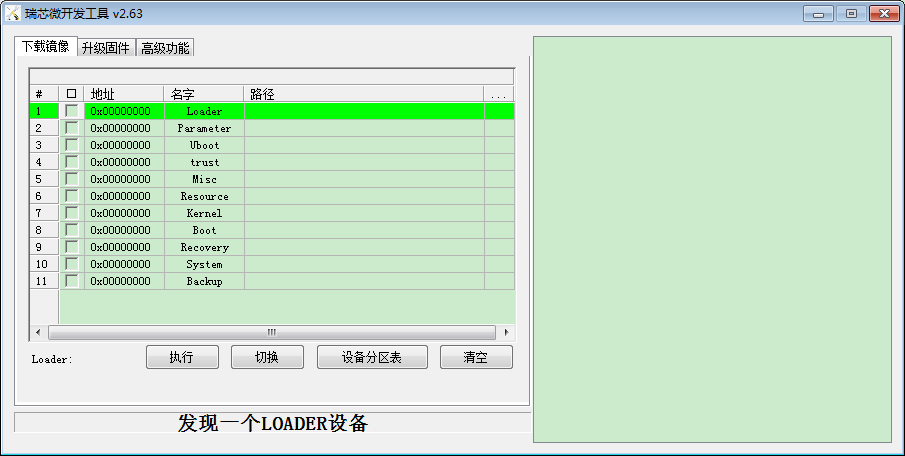
使用Type-C線連接開發(fā)板和主機,按住recover鍵不松開,然后再按reset鍵系統(tǒng)復位,大約兩秒后松開recover鍵。系統(tǒng)將提示發(fā)現(xiàn)一個loader設備。
點擊“設備分區(qū)表”按鈕,將自動讀取分區(qū)地址。
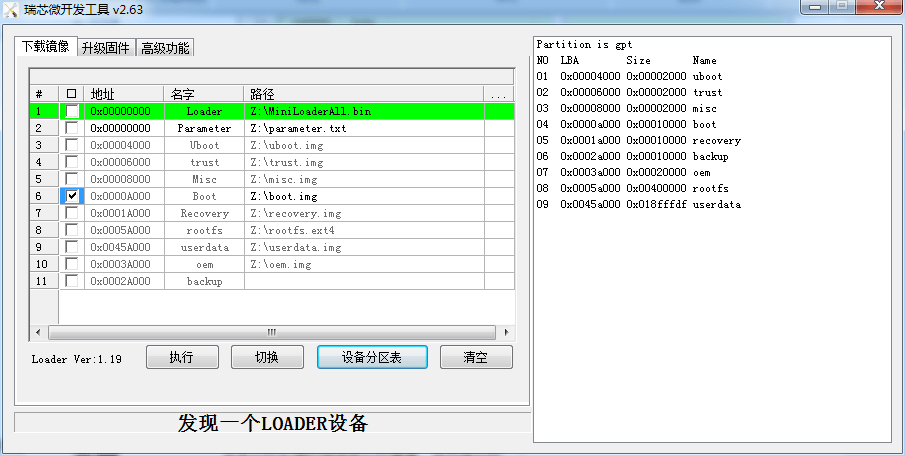
點擊左側勾選boot分區(qū)。
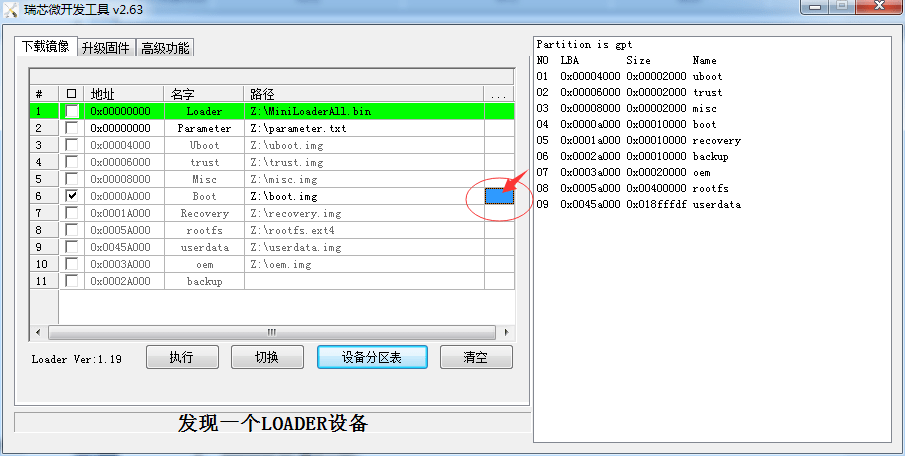
最后,點擊右側選擇您編譯生成的boot鏡像文件路徑,點擊“執(zhí)行”按鈕將自動燒寫并重新啟動。
想要了解有關實時補丁的詳細資料,您可以在評論區(qū)留言聯(lián)系飛凌嵌入式銷售工程師。
3、實時內核效果測試
測試實時性的關鍵指標便是“延時”,延時指的是不論系統(tǒng)運行在代碼的什么位置,當事件發(fā)生時,系統(tǒng)響應該事件的時間。
其中中斷延時指的是中斷觸發(fā)到中斷服務函數(shù)執(zhí)行完畢的時間;調度延時指的是進程在隊列中等待直到獲取CPU控制權被執(zhí)行的時間。
實時性,也可以表現(xiàn)為對這兩段延時最大的容忍程度。這里通過cyclictest軟件測量中斷延時和調度延時時間。
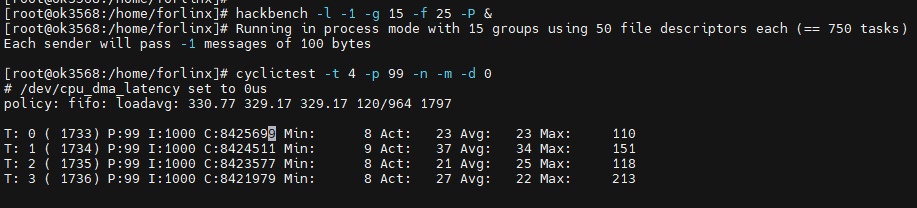
由于在真實的使用環(huán)境下并不能觸發(fā)最大的延時時間,因此在沒有合適負載的情況下運行cyclictest所測得的延時統(tǒng)計數(shù)據(jù)是沒有意義的。這里我們采用官方提供的hackbench工具來模擬部分類型的負載,然后在此基礎上運行cyclictest軟件來測試事件發(fā)生時,系統(tǒng)響應該事件的時間。
先來看一下未打實時補丁的測試結果:
再來看一下打實時補丁后的測試結果:
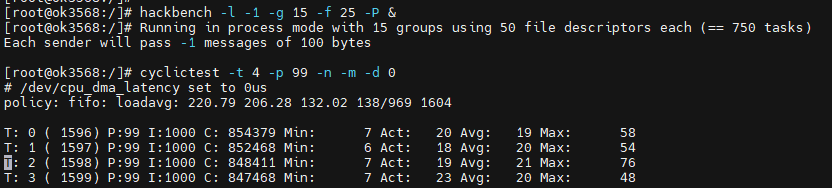
這里我們著重比較兩者Max得出的參數(shù),因為系統(tǒng)的實時性能是由最大延時時間決定的。通過對打實時補丁前后測試結果進行對比,打實時補丁以后,可以明顯看出延時從213μs降低到80μs以內,實時效果還是十分明顯的。(不同測試條件下的延時不同,這里的測試結果僅供大家參考)
-
ARM
+關注
關注
134文章
9328瀏覽量
375676 -
瑞芯微
+關注
關注
25文章
548瀏覽量
52265
發(fā)布評論請先 登錄
迅為RK3568開發(fā)板驅動指南GPIO子系統(tǒng)GPIO子系統(tǒng)API函數(shù)的引入
迅為RK3568開發(fā)板驅動指南GPIO子系統(tǒng)三級節(jié)點操作函數(shù)實驗
北京迅為RK3568開發(fā)板OpenHarmony系統(tǒng)南向驅動開發(fā)內核HDF驅動框架架構

RK3568內置MCU開發(fā)介紹之一

【迅為電子】叮!您的RK3568開發(fā)板系統(tǒng)鏡像備份方法請查收
迅為RK3568開發(fā)板支持銀河麒麟和開放麒麟系統(tǒng)
混合部署 | 在迅為RK3568上同時部署RT-Thread和Linux系統(tǒng)
迅為瑞芯微RK3568開發(fā)板/核心板《iTOP-3568開發(fā)板實時系統(tǒng)使用手冊》
迅為iTOP-RK3568/RK3588開發(fā)板獲麒麟軟件適配認證






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論