") 配置視覺識別系統(tǒng)的協(xié)作機器人智能碼垛
配置視覺識別系統(tǒng)的協(xié)作機器人智能碼垛

機器視覺系統(tǒng)可以代替人眼完成測量、定位、識別和檢測等工作,不僅可以克服人眼標準的不一致性、非重復(fù)性和主觀性等問題,為行業(yè)制定品質(zhì)管控的數(shù)字標準,還能在高速、高光譜、高分辨率、高可靠性以及工作持續(xù)性、環(huán)境適應(yīng)性等方面全面超越人眼極限。協(xié)作機器人結(jié)合機器視覺技術(shù),日益取得重大突破,并廣泛應(yīng)用于自動化制造、商超、物流、電商、醫(yī)藥、食品等行業(yè)。
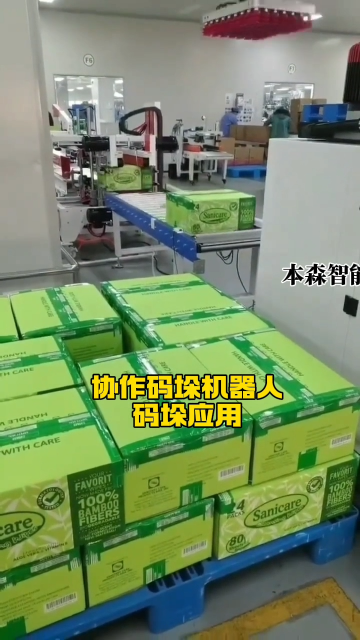
隨著國內(nèi)智造、物流、電商等行業(yè)的快速發(fā)展,分揀和碼垛作業(yè)強度大,工作內(nèi)容單一,人工作業(yè)的質(zhì)量及效率普遍低下,自動化分揀與碼垛系統(tǒng)應(yīng)運而生。而傳統(tǒng)自動化拆碼垛作業(yè)中,來料的擺放經(jīng)常都是無序、隨機的,用傳統(tǒng)的人工示教的方式難度大且效率低下,這就限制了自動化應(yīng)用范圍。為了解決此問題,泰科智能機器人研發(fā)了一套配備視覺識別系統(tǒng)的協(xié)作機器人智能碼垛方案,可以實現(xiàn)無序抓取進行分揀和碼垛,垛型穩(wěn)定且可充分利用空間,整個過程全部自動完成,無需人工干預(yù)。
使用工業(yè)級相機,高精度、大視野、大景深,專為拆碼垛場景設(shè)計。相機將獲得的圖像信息發(fā)送給機器人控制平臺軟件,平臺軟件中內(nèi)置視覺算法和智能軌跡規(guī)劃算法。來料箱體可隨意擺放,通過視覺算法識別將箱體的位置快速且準確的定位,智能軌跡規(guī)劃算法提供準確的抓取點位、放置點位和軌跡點位,引導(dǎo)協(xié)作機器人快速抓取和碼放動作,并放置到指定位置。
本方案使用泰科智能TB6系列協(xié)作機器人搭載視覺識別系統(tǒng)及末端執(zhí)行器,定位精度可達±0.03mm,滿足3~20KG不同負載(可定制30KG大負載),具備碰撞檢測,人機協(xié)作安全可靠,性能穩(wěn)定,簡單易用,靈活角度安裝,可快速部署,更節(jié)省空間,并提供一站式OEM定制。
整體方案智能程度高,具有精度高、抗環(huán)境光能力強、無懼深色物體的特點,能準確適用于各種箱體、包裝盒、料盒、編織袋、工件等物件,可應(yīng)對箱體表面面單、扎帶、膠帶、圖案、反光膜等復(fù)雜情況,且定位效果與精度不受物體擺放位姿的影響。內(nèi)置軌跡智能規(guī)劃等多種先進算法,并可根據(jù)實際情況設(shè)置一次抓取單個或多個物體,輕松處理各類箱體尺寸和常見垛形。
-
機器人
+關(guān)注
關(guān)注
213文章
29615瀏覽量
212177 -
視覺識別
+關(guān)注
關(guān)注
3文章
105瀏覽量
17016
發(fā)布評論請先 登錄
協(xié)作機器人廠商為何要自研視覺方案
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】視覺實現(xiàn)的基礎(chǔ)算法的應(yīng)用
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產(chǎn)品
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
【「具身智能機器人系統(tǒng)」閱讀體驗】+兩本互為支持的書
【「具身智能機器人系統(tǒng)」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
《具身智能機器人系統(tǒng)》第1-6章閱讀心得之具身智能機器人系統(tǒng)背景知識與基礎(chǔ)模塊
搬運碼垛機器人的特性和運用方式
碼垛機器人用途

碼垛機器人應(yīng)用行業(yè)前景





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論