 從原理到c++代碼實現 | 通過球面投影將點云轉換為Range圖像
從原理到c++代碼實現 | 通過球面投影將點云轉換為Range圖像
前言
將3維激光點云通過球面投影(Spherical Projection)轉換為2維距離圖像(Range Images),是自動駕駛應用場景中一種非常常見的點云處理方式。點云轉換為距離圖像后,通常會被輸入給一個2維卷積神經網絡去實現目標檢測、語義分割等任務。目前采用這種點云處理方式的典型目標檢測算法有RangeDet,語義分割算法有SqueezeSeg、RangeNet++、SalsaNext等。在這些文章中,都只給出一個通過球面投影轉換到距離圖像的最終公式,至于這個公式是怎么來的卻沒有詳細的推導,初看論文的讀者可能會比較困惑。本文將對這個投影公式做一定的推導,可能本人理解的也不是很對,歡迎大家批評指正。

球面投影推導過程
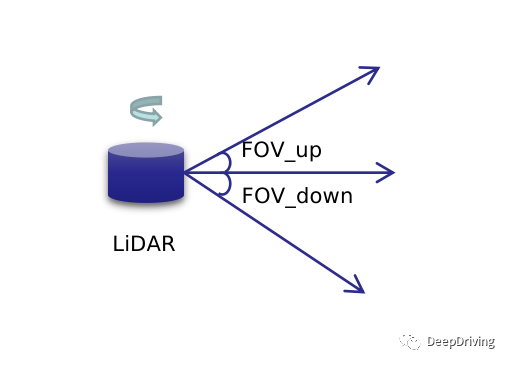
假設有一個m線的旋轉掃描式激光雷達,它的垂直視場角FOV被分為上下兩個部分:FOV_up和FOV_down,通常以FOV_up的數值為正數而FOV_down數值為負數,所以FOV = FOV_up + abs(FOV_down)。激光雷達旋轉掃描一周得到的點云相當于是以其自身為中心的空心圓柱體,如果把這個圓柱體展開的話,那么就可以把點云投影到一個圖像平面中去,這個圖像平面就是距離圖像。
對于一個m線的激光雷達,在掃描的某一時刻會得到m個點,如果旋轉一周掃描了n次,那么得到的點云就可以用一個的矩陣來表示。那么怎么把3維的點云投影到2維的距離圖像平面呢?這就需要用到球面坐標。
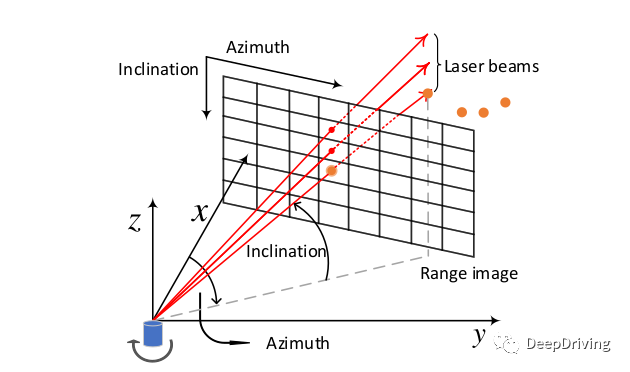
球面坐標用3個參數來表示:距離,方位角(Azimuth),天頂角(Zenith)。通常使用的激光雷達點云中的每個由3維笛卡爾坐標表示的點實際上是從球面坐標系轉換而來:
讓我們再通過下圖來理解一下3維笛卡爾坐標系和球面坐標系之間的關系。
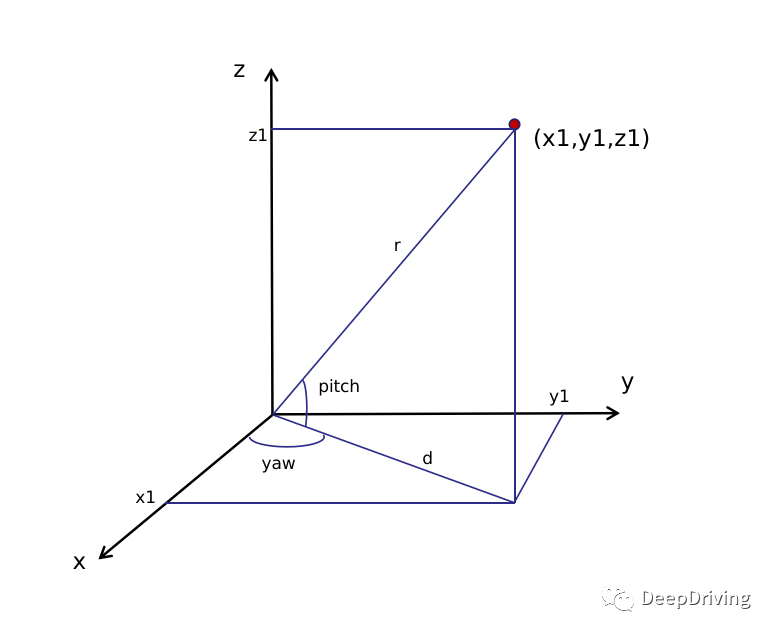
假設3維笛卡爾坐標系下的點坐標為,那么用球面坐標系可以這樣表示該點:
如果以x軸方向為前視圖的方向把激光雷達旋轉掃描一周得到的圓柱體展開后,可以得到一副這樣的圖像:坐標原點在圖像的中心,圖像中像素的縱坐標由pitch角投影得到(范圍為[FOV_down,FOV_up]),橫坐標由yaw角投影得到(范圍為)。
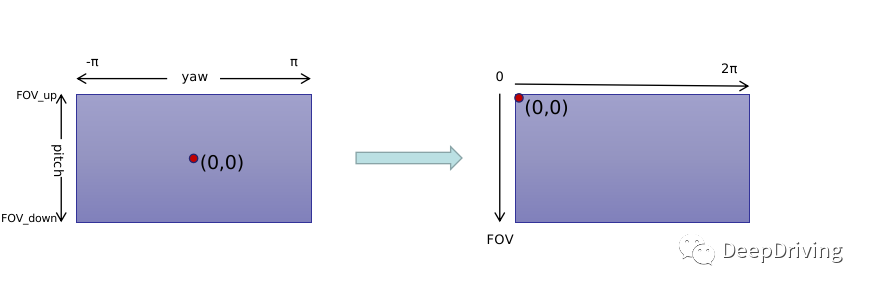
由于圖像坐標系是以左上角作為坐標原點,所以上面得到的前視圖還需要做一下坐標轉換,把坐標原點移到左上角去:
把3維點云投影為2維圖像,這種降維操作必然會帶來信息損失。為了盡可能減少投影帶來的信息損失,我們需要選擇合適大小的投影圖像。對于一個64線的激光雷達,一般會設置投影圖像的高為64,那么圖像的寬該如何設置呢?假設激光雷達的水平分辨率為0.35度,那么旋轉一周一個激光器最多產生的點數為。在卷積神經網絡中,一般會對輸入特征圖做多次2倍下采樣,所以圖像的寬度需要設置為2的次冪,這里可設置為1024。
由于不同類型激光雷達的視場角、水平分辨率不同,投影圖像的尺寸也會根據需要設置為不同的值,為了適應這些變化,yaw和pitch還需要進行規范化:
規范化后,再乘以投影圖像的寬高,就得到了這個點投影到距離圖像的坐標:
上式中的第二步是將代入得到的。
代碼實現
理解了原理后,我們再用代碼來把這個投影過程實現一遍。在RangeNet++中,點云被轉換為5個通道的距離圖像,這5個通道分別代表點云的這5個屬性。下面的代碼將展示如何通過球面投影將點云轉換為需要的距離圖像,使用的點云數據來源于SemanticKITTI數據集。
#include
";
return-1;
}
conststd::stringpcd_file(argv[1]);
pcl::PointCloud::Ptrpoint_cloud(
newpcl::PointCloud) ;
if(pcl::loadPCDFile(pcd_file,*point_cloud)==-1){
std::cout<"Couldn'treadpcdfile!
";
return-1;
}
constexprintwidth=2048;
constexprintheight=64;
constexprfloatfov_up=3*M_PI/180.0;
constexprfloatfov_down=-25*M_PI/180.0;
constexprfloatfov=std::abs(fov_up)+std::abs(fov_down);
conststd::vector<float>image_means{12.12,10.88,0.23,-1.04,0.21};
conststd::vector<float>image_stds{12.32,11.47,6.91,0.86,0.16};
float*range_images=newfloat[5*width*height]();
for(constauto&point:point_cloud->points){
constauto&x=point.x;
constauto&y=point.y;
constauto&z=point.z;
constauto&intensity=point.intensity;
constfloatrange=std::sqrt(x*x+y*y+z*z);
constfloatyaw=-std::atan2(y,x);
constfloatpitch=std::asin(z/range);
floatproj_x=0.5f*(yaw/M_PI+1.0f)*width;
floatproj_y=(1.0f-(pitch+std::abs(fov_down))/fov)*height;
proj_x=std::floor(proj_x);
proj_y=std::floor(proj_y);
constintu=std::clamp<int>(static_cast<int>(proj_x),0,width-1);
constintv=std::clamp<int>(static_cast<int>(proj_y),0,height-1);
range_images[0*width*height+v*width+u]=
(range-image_means.at(0))/image_stds.at(0);
range_images[1*width*height+v*width+u]=
(x-image_means.at(1))/image_stds.at(1);
range_images[2*width*height+v*width+u]=
(y-image_means.at(2))/image_stds.at(2);
range_images[3*width*height+v*width+u]=
(z-image_means.at(3))/image_stds.at(3);
range_images[4*width*height+v*width+u]=
(intensity-image_means.at(4))/image_stds.at(4);
}
//對range通道進行可視化
cv::Matrange=
cv::Mat(height,width,CV_32FC1,static_cast<void*>(range_images));
cv::Matnormalized_range,u8_range,color_map;
cv::normalize(range,normalized_range,255,0,cv::NORM_MINMAX);
normalized_range.convertTo(u8_range,CV_8UC1);
cv::applyColorMap(u8_range,color_map,cv::COLORMAP_JET);
cv::imwrite("range_color_map.jpg",color_map);
cv::imshow("RangeImage",color_map);
cv::waitKey(0);
delete[]range_images;
return0;
}
對range通道可視化的結果如下圖所示:

上面的代碼有幾個需要說明的地方:
-
fov_up,fov_down,image_means,image_stds這幾個參數來源于RangeNet++預訓練模型中的arch_cfg.yaml文件。 -
std::clamp需要c++17支持,編譯的時候請使用-std=c++17編譯選項。 -
實際使用中
width * height的值只需要計算一次,沒必要在循環里面反復計算,這里這么寫只是為了方便理解。
參考資料
-
RangeDet: In Defense of Range View for LiDAR-based 3D Object Detection -
https://towardsdatascience.com/spherical-projection-for-point-clouds-56a2fc258e6c
-
C++
+關注
關注
22文章
2117瀏覽量
74790 -
代碼
+關注
關注
30文章
4887瀏覽量
70271 -
編譯
+關注
關注
0文章
676瀏覽量
33759 -
自動駕駛
+關注
關注
788文章
14209瀏覽量
169604
原文標題:從原理到c++代碼實現 | 通過球面投影將點云轉換為Range圖像
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
DLP4500怎么確定投影儀開始投影的同時相機的c++代碼開始運行?
創建了用于OpenVINO?推理的自定義C++和Python代碼,從C++代碼中獲得的結果與Python代碼不同是為什么?
基于LockAI視覺識別模塊:C++使用圖像的統計信息
阿里云SDK再升級,宣布支持C++語言
基于Verilog的垂直投影實現
如何利用coder將matlab中的程序轉換成C/C++
將代碼轉換為電壓,如何可以實現?





 工商網監
工商網監
評論