 工業機器人的結構特點和性能
工業機器人的結構特點和性能

無錫金紅鷹工業自動化有限公司是一家設計生產工業機器人及提供機器人工業自動化系統解決方案的高新技術企業。如果您對焊接機器人感興趣,可以聯系無錫金紅鷹,我們是專業的工業機器人集成商,提供機器人系統設計、生產、銷售及售后一站式服務。
工業機器人的結構特點
和其他機器設計相比,工業機器人在結構上有很多獨特之處,主要可以歸納為以下幾點:

無錫金紅鷹焊接機器人及控制柜
1.工業機器人操作機可以簡化成各連桿首尾相接,末端開放的一個開式連桿系(也可能存在部分閉鏈結構),連桿末端一般無法加以支撐,因而操作機的結構剛度差。
2.在組成操作機的開式連桿系中,每根連桿都其有獨立的驅動器,因而屬于主動連桿系。不同連桿之間的運動沒有依從關系,操作機的運動更為靈話,但控制起來也更復雜。
3.連桿驅動轉矩在運動過程中的變化規律比較復雜,連桿的驅動屬于伺服控制型,對機械傳動系統的剛度、間隙和運動精度都有較高的要求。
4.連桿的受力狀態、剛度條件和動態性能都隨位姿的改變而變化,因此容易發生振動或其它不穩定現象。
工業機器人性能評判指標
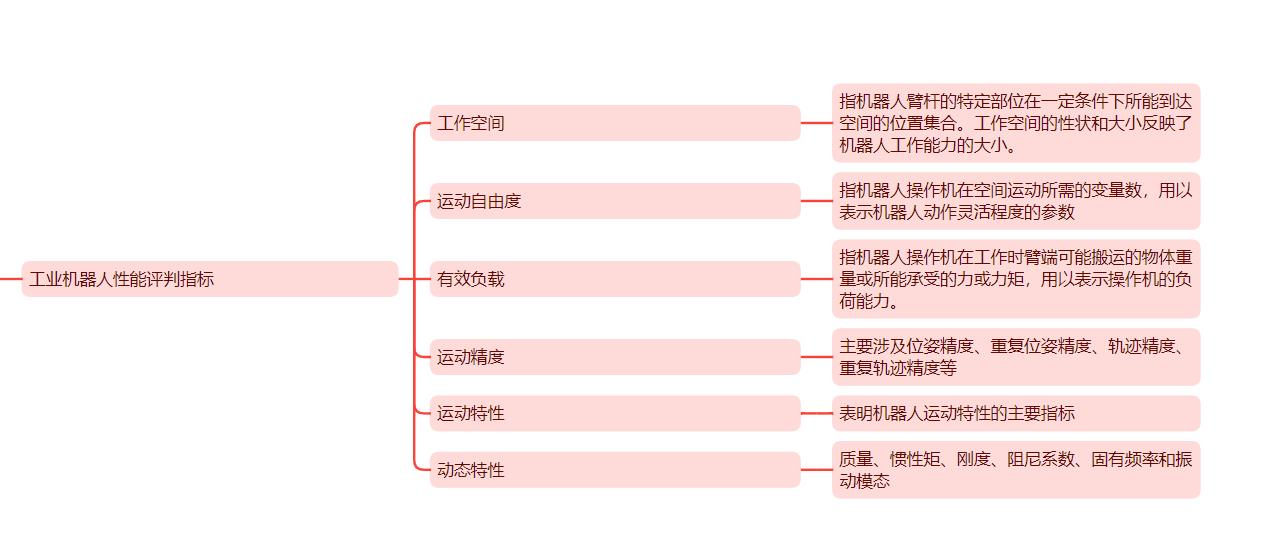
表示機器人特性的基本參數和性能指標主要有工作空間、自由度、有效負載、運動精度、運動特性、動態特性等。
工業機器人性能指標
工作空間是指機器人臂桿的特定部位在一定條件下所能到達空間的位置集合。工作空間的性狀和大小反映了機器人工作能力的大小。
(1)通常工業機器人說明書中表示的工作空間指的是手腕上機械接口坐標系的原點在空間能達到的范圍,也即手腕端部法蘭的中心點在空間所能到達的范圍,而不是末端執行器端點所能達到的范圍。因此,在設計和選用時,要注意安裝末端執行器后,機器人實際所能達到的工作空間。
(2)機器人說明書上提供的工作空間往往要小于運動學意義上的空間。這是因為在可達空間中,手臂位姿不同時有效負載、允許達到的速度和加速度都不一樣,在臂桿位置允許的極限值通常要比其他位置的小些。此外,在機器人的可達空間邊界上可能存在自由度退化的問題,此時的位姿稱為奇異位形,而且在奇異位形周圍相當大的范圍內都會出現自由度進化現象,這部分工作空間在機器人工作時都不能被利用。
(3)除了在工作邊緣,實際應用中的工業機器人還可能由于受到機械結構的限制,在工作空間的內部也存在著臂端不能達到的區域,這就是常說的空洞或空腔。空腔是指在工作空間內臂端不能達到的完全封閉空間。而空洞是指在沿轉軸周圍全長上臂端都不能達到的空間。
2.運動自由度
運動自由度是指機器人操作機在空間運動所需的變量數,用以表示機器人動作靈活程度的參數,一般是以沿軸線移動和繞軸線轉動的獨立運動的數目來表示。
自由物體在空間自六個自由度(三個轉動自由度和三個移動自由度)。工業機器人往往是個開式連桿系,每個關節運動副只有一個自由度,因此通常機器人的自由度數目就等于其關節數。機器人的自由度數目越多,功能就越強。
目前工業機器人通常具有4—6個自由度。當機器人的關節數(自由度)增加到對末端執行器的定向和定位不再起作用時,便出現了冗余自由度。冗余度的出現增加了機器人工作的靈活型,但也使控制變得更加復雜。
工業機器人在運動方式上,總可以分為直線運動(簡記為P)和旋轉運動(簡記為R)兩種,應用簡記符號P和R可以表示操作機運動自由度的特點,如RPRR表示機器人操作機具有四個自由度,從基座開始到臂端,關節運動的方式依次為旋轉-直線-旋轉-旋轉。此外,工業機器人的運動自由度還有運動范圍的限制。

無錫金紅鷹焊接機器人參數
有效負載是指機器人操作機在工作時臂端可能搬運的物體重量或所能承受的力或力矩,用以表示操作機的負荷能力。
機器人在不同位姿時,允許的可搬運質量是不同的,因此機器人的額定可搬運質量是指其臂桿在工作空間中任意位姿時腕關節端部都能搬運的質量。
4.運動精度
機器人機械系統的精度主要涉及位姿精度、重復位姿精度、軌跡精度、重復軌跡精度等。
位姿精度是指指令位姿和從同一方向接近該指令位姿時的實到位姿中心之間的偏差。重復位姿精度是指對同指令位姿從同一方向重復響應n次后實到位姿的不一致程度。
軌跡精度是指機器人機械接口從同一方向n次跟隨指令軌跡的接近程度。軌跡重復精度是指對一給定軌跡在同方向跟隨n次后實到軌跡之間的不一致程度。
5.運動特性
速度和加速度是表明機器人運動特性的主要指標。在機器人說明書中,通常提供了主要運動自由度的穩定速度,但在實際應用中單純考慮穩定速度是不夠的,還應注意其允許加速度。
6.動態特性
動態特性結構動態參數主要包括質量、慣性矩、剛度、阻尼系數、固有頻率和振動模態。
審核編輯:湯梓紅
-
工業機器人
+關注
關注
91文章
3453瀏覽量
94019
發布評論請先 登錄
工業通信界的“月老”:CC\\-Link IE和DeviceNet如何牽起機器人的“紅線”
工業機器人與協作機器人概念不同

盤點#機器人開發平臺
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
EtherCAT科普系列(7): EtherCAT技術在工業機器人控制系統領域的應用

波士頓機器人滑環的技術特點與應用前景

工業機器人控制方式有幾種
工業機器人常用的編程方式

國產工業機器人與進口機器人區別有哪些
工業機器人AMR的最強大腦,你了解多少?






 工商網監
工商網監
評論