") KUKA機(jī)器人程序案例:流水生產(chǎn)線的搬運(yùn)、碼垛運(yùn)動(dòng)編程
KUKA機(jī)器人程序案例:流水生產(chǎn)線的搬運(yùn)、碼垛運(yùn)動(dòng)編程
碼垛分為卸垛和堆垛,物料的卸垛就是機(jī)器人將物料從物料庫(kù)取出,依次放在卸垛區(qū)(物料托盤(pán)上)的過(guò)程,物料的堆垛就是機(jī)器人將物料從堆垛區(qū)(物料托盤(pán))抓起,依次放入物料庫(kù)的過(guò)程。本節(jié)以卸垛過(guò)程為例:
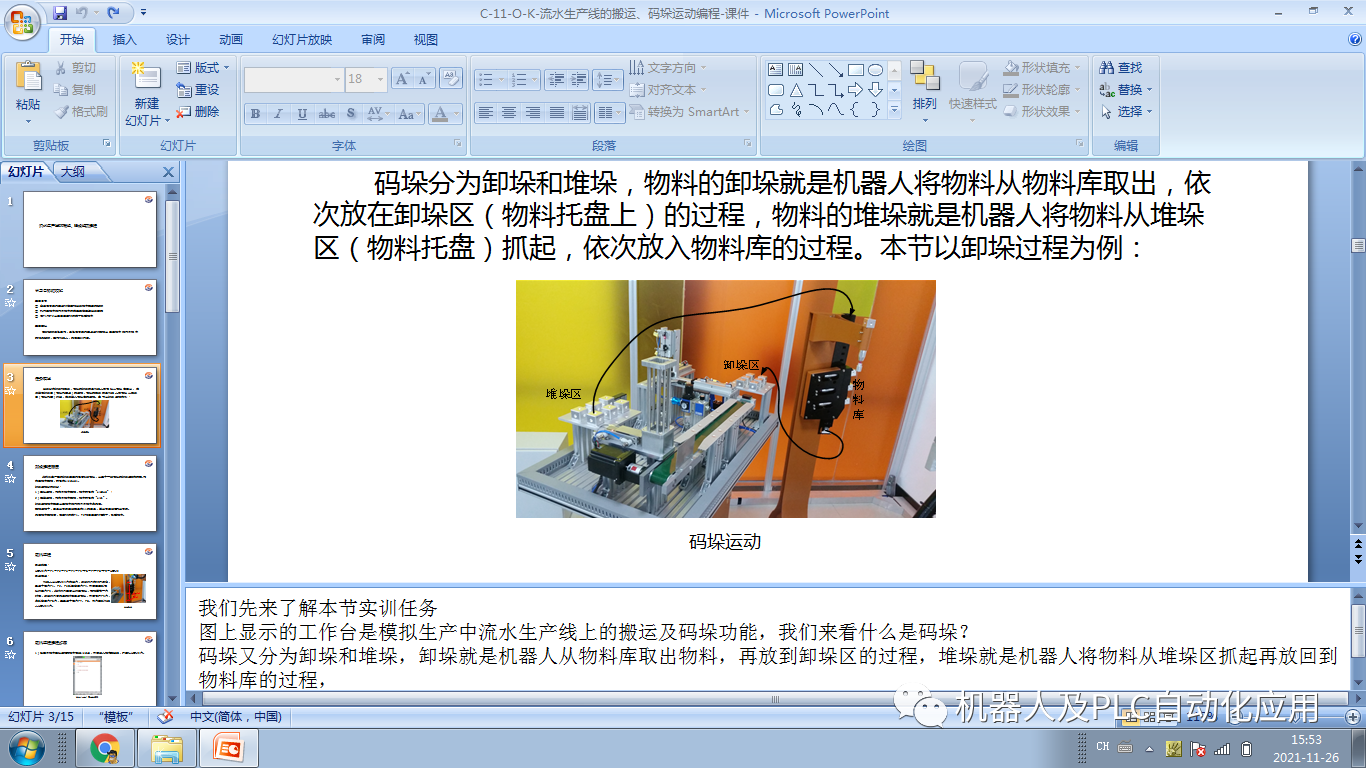
圖上顯示的工作臺(tái)是模擬生產(chǎn)中流水生產(chǎn)線上的搬運(yùn)及碼垛功能,我們來(lái)看什么是碼垛?
碼垛又分為卸垛和堆垛,卸垛就是機(jī)器人從物料庫(kù)取出物料,再放到卸垛區(qū)的過(guò)程,堆垛就是機(jī)器人將物料從堆垛區(qū)抓起再放回到物料庫(kù)的過(guò)程,
本例我們先以卸垛為對(duì)象,講述編程的相關(guān)操作
此流水生產(chǎn)線的卸垛運(yùn)動(dòng)共包含6塊物料,以其中一塊物料的卸垛過(guò)程為對(duì)象,作為主程序編程,命名為xieduo1。
卸垛過(guò)程分兩部分:
1)取料過(guò)程,作為子程序編程,程序命名為“xieduo”;
2)擺放過(guò)程,作為子程序編程,程序命名為“xie1”。
卸垛過(guò)程程序編寫(xiě)以主程序調(diào)用兩個(gè)子程序來(lái)完成。
編程過(guò)程中,工具坐標(biāo)系選擇編號(hào)為11的工具,基坐標(biāo)選擇世界坐標(biāo)系。
完成程序編程后,在運(yùn)行方式T1、T2和自動(dòng)運(yùn)行模式下,測(cè)試程序。
取料過(guò)程
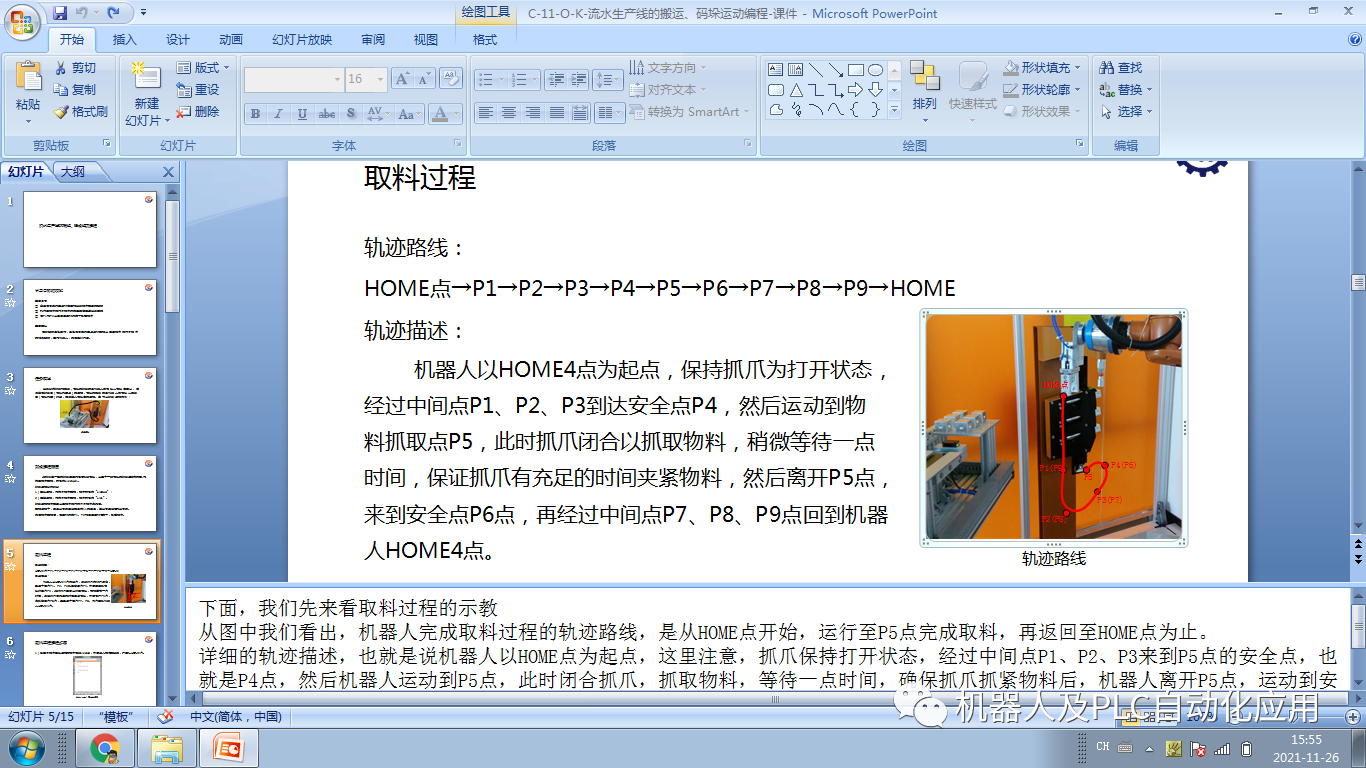
軌跡路線:
HOME點(diǎn)→P1→P2→P3→P4→P5→P6→P7→P8→P9→HOME
軌跡描述:
機(jī)器人以HOME4點(diǎn)為起點(diǎn),保持抓爪為打開(kāi)狀態(tài),
經(jīng)過(guò)中間點(diǎn)P1、P2、P3到達(dá)安全點(diǎn)P4,然后運(yùn)動(dòng)到物
料抓取點(diǎn)P5,此時(shí)抓爪閉合以抓取物料,稍微等待一點(diǎn)
時(shí)間,保證抓爪有充足的時(shí)間夾緊物料,然后離開(kāi)P5點(diǎn),
來(lái)到安全點(diǎn)P6點(diǎn),再經(jīng)過(guò)中間點(diǎn)P7、P8、P9點(diǎn)回到機(jī)器
人HOME4點(diǎn)。
取料過(guò)程編程步驟
1)創(chuàng)建子程序取料過(guò)程的程序模塊xieduo,然后進(jìn)入程序編輯器,并確認(rèn)HOME點(diǎn)。

2)示教機(jī)器人的取料過(guò)程,添加機(jī)器人從P1點(diǎn)運(yùn)動(dòng)到P9點(diǎn)的程序命令。
3)取料前,須確保工具抓爪處于打開(kāi)狀態(tài),在機(jī)器人運(yùn)行至P1點(diǎn)之前添加OUT命令,設(shè)定值為FALSE。
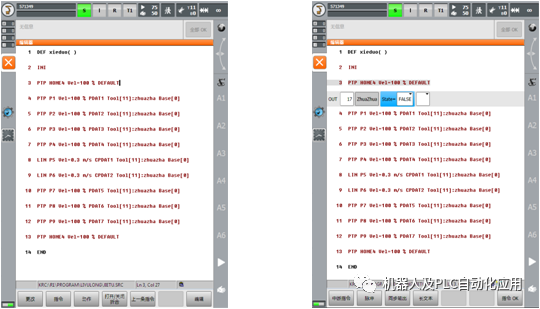
4)機(jī)器人在運(yùn)行到P5點(diǎn)時(shí),應(yīng)關(guān)閉抓爪以抓取物料,所以在P5點(diǎn)命令行下添加邏輯命令OUT,設(shè)定值為T(mén)RUE。

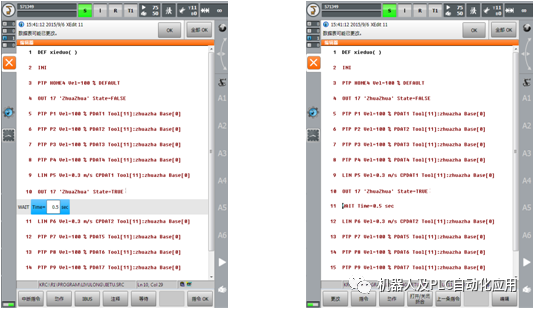
5)機(jī)器人從P5點(diǎn)運(yùn)動(dòng)到P6點(diǎn)之前,需完成抓爪閉合工作,添加WAIT指令,使抓爪在離開(kāi)P5點(diǎn)之前有充足的時(shí)間夾緊物料。
6)整個(gè)抓取物料過(guò)程的程序編寫(xiě),
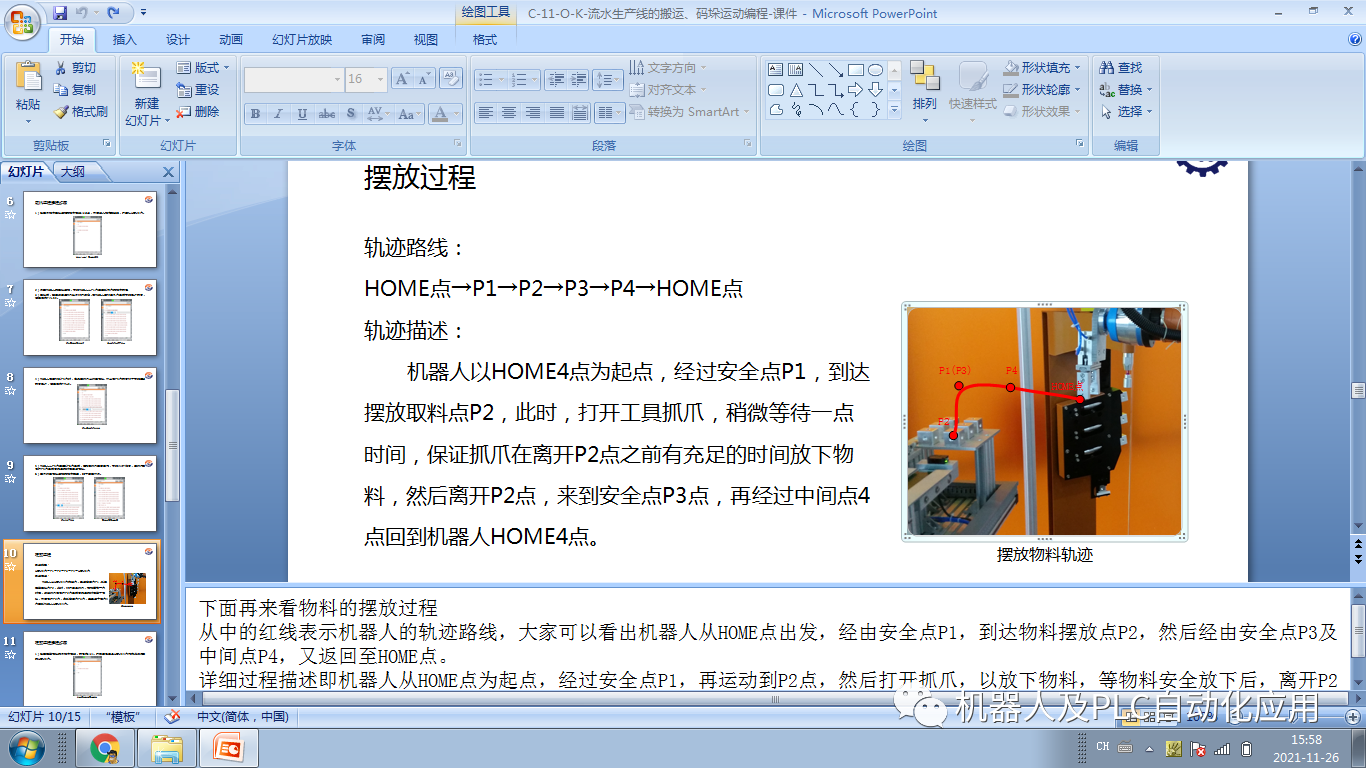
擺放過(guò)程:
軌跡路線:
HOME點(diǎn)→P1→P2→P3→P4→HOME點(diǎn)
軌跡描述:
機(jī)器人以HOME4點(diǎn)為起點(diǎn),經(jīng)過(guò)安全點(diǎn)P1,到達(dá)
擺放取料點(diǎn)P2,此時(shí),打開(kāi)工具抓爪,稍微等待一點(diǎn)
時(shí)間,保證抓爪在離開(kāi)P2點(diǎn)之前有充足的時(shí)間放下物
料,然后離開(kāi)P2點(diǎn),來(lái)到安全點(diǎn)P3點(diǎn),再經(jīng)過(guò)中間點(diǎn)4
點(diǎn)回到機(jī)器人HOME4點(diǎn)。
擺放過(guò)程編程步驟:
1)創(chuàng)建擺放物料的子程序模塊,命名為xie1,并將全局變量HOME4點(diǎn)作為此次示教的HOME點(diǎn)。
2)添加機(jī)器人從P1點(diǎn)到P4點(diǎn)的程序命令。
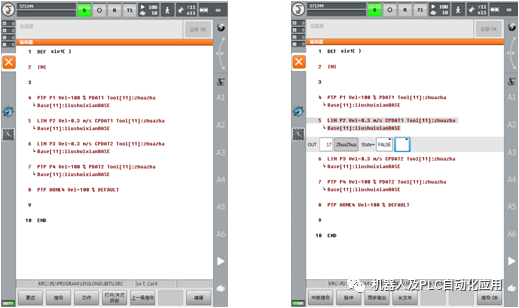
3)機(jī)器人運(yùn)動(dòng)到P2點(diǎn)時(shí)放下物料,應(yīng)使抓爪打開(kāi),添加OUT指令,設(shè)定值為FALSE。
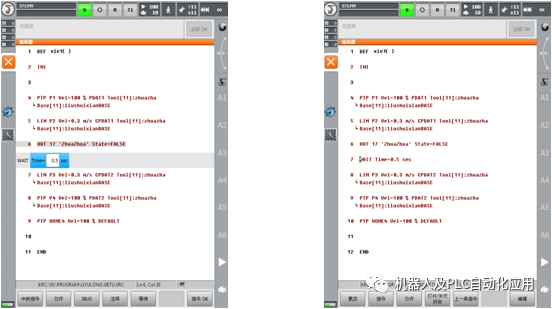
4)添加邏輯指令WAIT使工具抓爪在離開(kāi)P2點(diǎn)之前有充足的時(shí)間放下物料。
5)機(jī)器人整個(gè)擺放過(guò)程程序編寫(xiě)如下右圖所示。
卸垛過(guò)程主程序編寫(xiě)步驟
1)創(chuàng)建卸垛過(guò)程的主程序模塊xieduo1,然后刪除兩行PTP HOME指令。
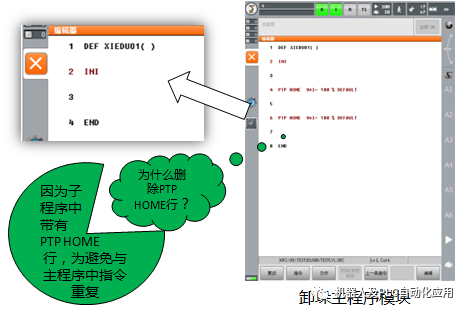
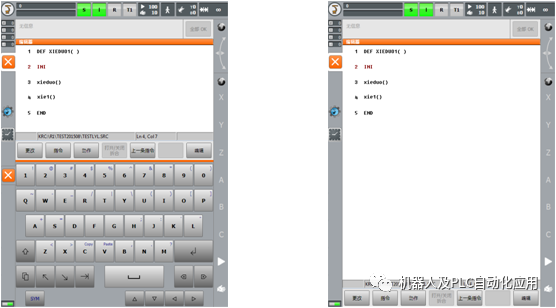
2)在編輯器內(nèi)輸入子程序名稱和括號(hào),xieduo()和xie1(),作為要調(diào)用的子程序。
3)關(guān)閉編輯器,主程序編程如下右圖所示
最后,程序編寫(xiě)完成后,在T1、T2和自動(dòng)運(yùn)行方式下測(cè)試程序
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28695瀏覽量
208657 -
編程
+關(guān)注
關(guān)注
88文章
3639瀏覽量
94031 -
程序
+關(guān)注
關(guān)注
117文章
3798瀏覽量
81457 -
KUKA
+關(guān)注
關(guān)注
3文章
217瀏覽量
16620
原文標(biāo)題:【碼垛】KUKA 程序案例:流水生產(chǎn)線的搬運(yùn)、碼垛運(yùn)動(dòng)編程
文章出處:【微信號(hào):設(shè)備維修屋,微信公眾號(hào):設(shè)備維修屋】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
碼垛機(jī)器人的優(yōu)點(diǎn)詳細(xì)介紹
搬運(yùn)碼垛機(jī)器人
搬運(yùn)碼垛教育機(jī)器人-鷗鵬科技
六軸智能搬運(yùn)機(jī)器人的優(yōu)劣勢(shì)分別是什么
再牛的自動(dòng)化車(chē)間都不能缺少搬運(yùn)機(jī)器人
碼垛機(jī)器人在活塞生產(chǎn)中的應(yīng)用有哪些
桁架機(jī)器人的概念與特點(diǎn)都有哪些?
一種工業(yè)機(jī)器人柔性自動(dòng)化生產(chǎn)線實(shí)訓(xùn)系統(tǒng)
機(jī)器人搬運(yùn)碼垛工作站介紹
ZN-980B機(jī)器人搬運(yùn)碼垛工作站介紹
機(jī)器人碼垛生產(chǎn)線的組成以及它的工作流程介紹
全自動(dòng)開(kāi)裝封箱打包機(jī)器人碼垛機(jī)生產(chǎn)線
埃斯頓碼垛機(jī)器人紙箱碼垛生產(chǎn)線應(yīng)用
KUKA流水生產(chǎn)線的搬運(yùn)、碼垛運(yùn)動(dòng)編程的案例
在涂料生產(chǎn)線,碼垛機(jī)器人的用途優(yōu)勢(shì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論