 汽車定速巡航怎么使用
汽車定速巡航怎么使用

1. 巡航的定義
汽車定速巡航用于控制汽車的定速行駛,汽車一旦被設定為巡航狀態時,發動機的供油量便由電腦控制,電腦會根據道路狀況和汽車的行駛阻力不斷地調整供油量,使汽車始終保持在所設定的車速行駛,而無需操縱油門。
2. 巡航的主要電路
2.1.一汽豐田皇冠汽車巡航
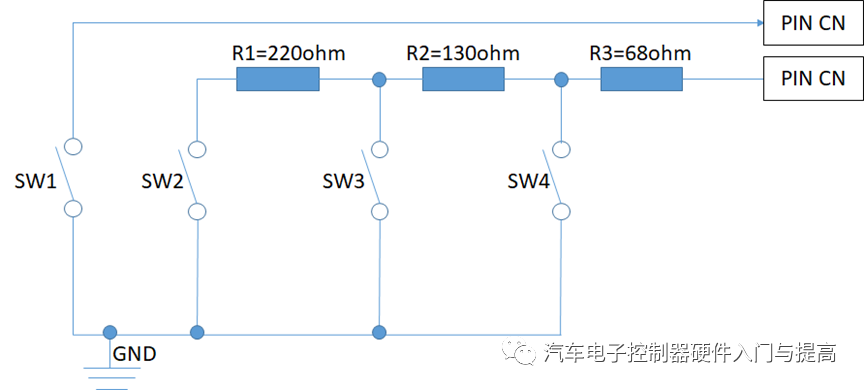
其中:
SW1為主開關(CMS);SW2為取消開關(CS);SW3為設置減速開關(SET/-);SW4為恢復加速開關(RES/+)
2.2.福特福克斯汽車巡航
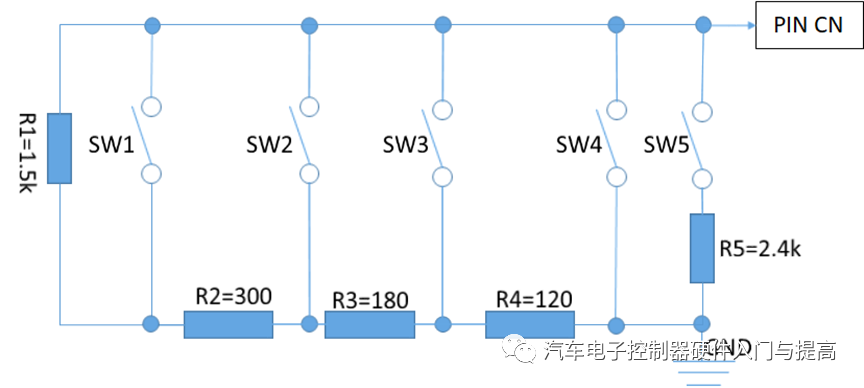
其中:
SW1為復位開關(RES);SW2為加速開關(+);SW3為減速開關(-);SW4為取消開關(CS);SW5為主開關(CMS)
2.3. 巡航電路的匹配、設計與計算
以福特福克斯汽車巡航,MCU以infineon TC1728舉例

2.3.2.R11/R12/R13/C1/C2/C3設計和計算
可根據【模擬輸入接口電路介紹之一】設計和計算后設定合理的值
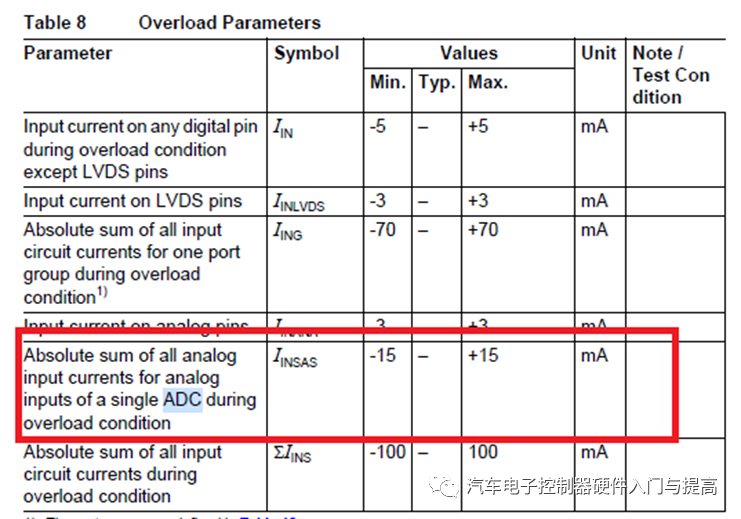
其中,TC1728的限流規格如下,需要滿足單通道以及所有通道兩個指標不能超。
3.3.巡航與控制器接口電路匹配設計與計算
重點講解匹配設計與計算
3.3.1.兩路MCU ADC冗余設計
鑒于巡航信號危及生命的重要信號,設計上需要考慮一路MCU ADC失效,不能導致巡航功能失效或亂動作,故設計兩路MCU ADC采集原始電壓值,可在兩路MCU ADC進行冗余校驗,保證輸入的完整性以及正確性。
3.3.2. MCU ADC電壓計算(R11=1000ohm)
V(ADC)=VCCRx/(Rx+R11)-Ioz1R12
其中
Ioz1R12(max)=600nA10k=6mA,影響較小(當然精確計算可把這部分計算進去);
Rx為巡航電阻網路開關閉合時候的電阻
R11=1000ohm
以上的電阻都是參與運算,需要選擇精度小于等于1%的電阻
以下化簡計算(未將VCC/R上的誤差計算入內)
V(ADC)=VCC*Rx/(Rx+R11)
| 類型 | 值 | 單位 | 備注 |
|---|---|---|---|
| VCC | 5V | V | |
| R11 | 1000 | ohm | |
| Rx | 開路 | 無窮大 | ohm |
| 對地短路 | 0 | ohm | |
| 所有開關未動作 | 2100 | ohm | |
| 僅SW1(復位開關)閉合 | 600 | ohm | |
| 僅SW2(加速開關)閉合 | 300 | ohm | |
| 僅SW3(減速開關)閉合 | 120 | ohm | |
| 僅SW4(取消開關)閉合 | 0 | ohm | |
| 僅SW5(主開關)閉合 | 923.08 | ohm | R1//R5 |
可以計算出V(ADC)
| 序號 | 類型 | V(ADC) | 設置電壓范圍 |
|---|---|---|---|
| 1 | 開路 | 5V | 4.5V以上 |
| 2 | 對地短路 | 0V | 0.2V以下 |
| 3 | 對VCC/VBAT短路 | 5V | 4.5V以上 |
| 4 | 所有開關未動作 | 3.39 | 3V-3.8V |
| 5 | 僅SW1(復位開關)閉合 | 1.88 | 1.5V-2.1V |
| 6 | 僅SW2(加速開關)閉合 | 1.15 | 0.9V-1.4V |
| 7 | 僅SW3(減速開關)閉合 | 0.54 | 0.3V-0.8V |
| 8 | 僅SW4(取消開關)閉合 | 0.00 | 0.2V以下 |
| 9 | 僅SW5(主開關)閉合 | 2.40 | 2.2V-2.8V |
1)從上表中可以發現,對地短路與取消開關的電平一樣,可以理解為短路情況下優先退出巡航
2)SW1~SW5同時按下時,SW4優先級最高,即退出巡航優先級最高
3)SW1~SW3同時按下時,SW3優先級最高,即減速優先級最高
4)SW1~SW2同時按下時,SW2優先級最高,即加速優先級最高
5)開路與對VCC/VBAT短路無法區分,但是可以在上電過程中(此刻所有巡航開關都未工作),發現檢測電壓不是3V-3.8V之間而是4.5V以上即判斷為開路或對VCC/VBAT短路
6)短路與SW4閉合無法區分,但是可以在上電過程中(此刻所有巡航開關都未工作),發現檢測電壓不是3V-3.8V之間而是0.2V以下即判斷為對地短路
3.3.3. MCU ADC電壓計算(R11=600ohm)
R11=600ohm時,電壓分的更開,容易區分
| 序號 | 類型 | V(ADC) | 設置電壓范圍 |
|---|---|---|---|
| 1 | 開路 | 5V | 4.5V以上 |
| 2 | 對地短路 | 0V | 0.5V以下 |
| 3 | 對VCC/VBAT短路 | 5V | 4.5V以上 |
| 4 | 所有開關未動作 | 4.04 | 3.7V-4.3V |
| 5 | 僅SW1(復位開關)閉合 | 2.73 | 2.4V-2.9V |
| 6 | 僅SW2(加速開關)閉合 | 1.88 | 1.5V-2.1V |
| 7 | 僅SW3(減速開關)閉合 | 0.97 | 0.6V-1.3V |
| 8 | 僅SW4(取消開關)閉合 | 0.00 | 0.5V以下 |
| 9 | 僅SW5(主開關)閉合 | 3.24 | 3.0V-3.6V |
電阻值功率計算需參照【模擬輸入接口電路介紹之一】計算是否滿足要求,必須要要計算此參數(WORSE CASE下對VBAT短路時R11的功耗最大),否則可能出現電阻燒毀的可能性,如果R11功耗不滿足,可考慮使用功率電阻或幾個電阻并聯方式。
此章節不再贅述。
-
傳感器
+關注
關注
2565文章
52861瀏覽量
766184 -
接口
+關注
關注
33文章
8980瀏覽量
153560 -
定速巡航
+關注
關注
0文章
5瀏覽量
2259
發布評論請先 登錄
請問怎么用單片機實現定速巡航?
深入淺出趣解自動化控制PID!
客車用定速巡航系統
奔馳真的很“奔馳”_奔馳對定速巡航失控做出的回應

奔馳車定速巡航失控狂奔百公里

自適應巡航是什么?它與定速巡航有區別嗎?
自動化控制PID到底是啥趣味講解資料說明
什么是PID?給你講個通俗易懂的故事
徹底搞懂PID到底是啥
PID到底是什么
全面剖析PID控制器
換一種方法解讀PID算法
【精選好文】玩轉OpenHarmony PID:教你打造兩輪平衡車
PID到底是個什么?舉個例子告訴你






 工商網監
工商網監
評論