") 均勻B樣條采樣從LiDAR數(shù)據(jù)中快速且魯棒地估計地平面
均勻B樣條采樣從LiDAR數(shù)據(jù)中快速且魯棒地估計地平面
摘要
本文提出了一種從自動駕駛車輛的LiDAR測量數(shù)據(jù)中中快速且魯棒地估計地面表面的方法。地面表面被建模為一個均勻B樣條,該樣條對不同的測量密度具有魯棒性,并且通過一個單一參數(shù)來控制平滑性先驗。我們將估計過程建模為一個魯棒最小二乘優(yōu)化問題,可以重新表述為一個線性問題,從而可以高效地解決。使用SemanticKITTI數(shù)據(jù)集進(jìn)行了定量評估,通過將點級語義注釋分類為地面點和非地面點。最后在真實場景中驗證了該方法在我們的研究車輛上的效果。
主要內(nèi)容
文章采用了統(tǒng)一的B樣條(Uniform B-Splines)來建模地面表面,這種方法對于不同的測量密度具有魯棒性,并且通過控制平滑度先驗的單個參數(shù)來調(diào)整模型的平滑性。將地面估計過程建模為一個魯棒的最小二乘優(yōu)化問題,并通過重新構(gòu)造為線性問題來高效地解決。利用SemanticKITTI數(shù)據(jù)集進(jìn)行了定量評估,通過將點級語義注釋分類為地面點和非地面點來驗證了方法的效果。最后,他們在實際場景中的研究車輛上進(jìn)行了驗證。此外,文章還介紹了圖1中的實驗結(jié)果。通過提取每個網(wǎng)格單元中的最大觀測反射高度,可以構(gòu)建一個組合高度圖,該高度圖顯示了地面表面的估計結(jié)果。
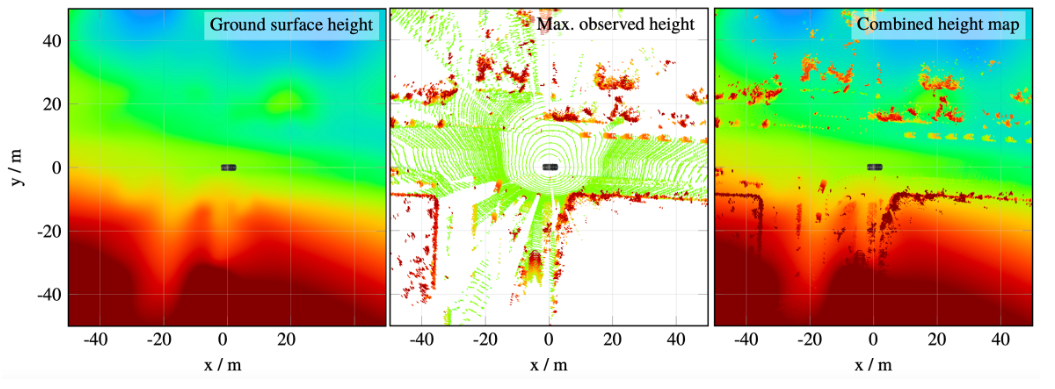
圖1:估計的地面表面(頂部)是所提出方法的結(jié)果。在隨后的處理步驟中,我們可以使用每個網(wǎng)格單元中觀測到的最大反射高度(中間)來構(gòu)建一個組合高度圖(底部)。白色/藍(lán)色/紅色:無/低/高數(shù)值。
主要步驟如下:
1. 統(tǒng)一B樣條建模:詳細(xì)介紹了統(tǒng)一B樣條的數(shù)學(xué)原理和擬合過程,,統(tǒng)一B樣條具有局部支持,因此能夠更好地適應(yīng)測量點的分布,文章還討論了如何選擇合適的B樣條控制點和階數(shù)。
2. 平滑性約束:為了減少過擬合和噪聲的影響,文章引入了平滑性約束,以控制地面估計的光滑度。通過引入正則化項,將平滑性約束融入到優(yōu)化問題中。
3. 魯棒優(yōu)化:將地面估計問題建模為魯棒最小二乘優(yōu)化問題,以提高對離群值的魯棒性。文章詳細(xì)介紹了魯棒優(yōu)化的數(shù)學(xué)原理和求解方法,并討論了權(quán)重函數(shù)的選擇。
實驗與分析
文章在SemanticKITTI數(shù)據(jù)集的訓(xùn)練集上進(jìn)行評估,將所有的測量范圍分為地面、非地面和不關(guān)心的類別,具體總結(jié)在表格I中。

A. 不同地面模型的比較
首先比較了在僅使用地面點進(jìn)行估計(無異常點的情況下)時不同地面模型的準(zhǔn)確性。在這里將我們的UBS模型與三次多項式、估計和預(yù)校準(zhǔn)的地面平面進(jìn)行比較。隨機抽樣了所有地面點的10%用于驗證,也就是說這些點在優(yōu)化過程中沒有使用。然后,我們比較所有驗證點與模型估計的地面高度之間的絕對高度誤差。圖3顯示了平均絕對高度誤差和隨著測量距離變化的平均誤差。總體而言,UBS模型具有最低的誤差。與多項式模型相比,隨著測量距離的增加,誤差僅略微增加,因為對UBS模型的測量的影響僅局限于局部區(qū)域,因此幾乎不受局部變化的測量密度的影響。
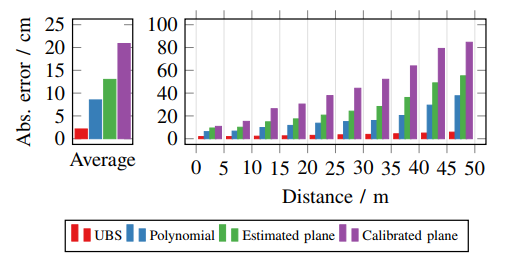
圖3:當(dāng)僅使用地面點進(jìn)行優(yōu)化時,不同地面模型的絕對地面點誤差。左圖:所有驗證點的平均值。右圖:在距離傳感器5米范圍內(nèi)的距離間隔內(nèi)的平均值。
B. 不同魯棒性方法的比較
a) 異常值噪聲估計:為了證明使用魯棒優(yōu)化方法的合理性,我們首先旨在估計非地面點的地面距離分布,即異常值噪聲。為了估計異常值噪聲,我們僅基于標(biāo)記的地面點計算地面曲面,并計算估計地面高度與非地面點之間的誤差的直方圖,如圖4所示。
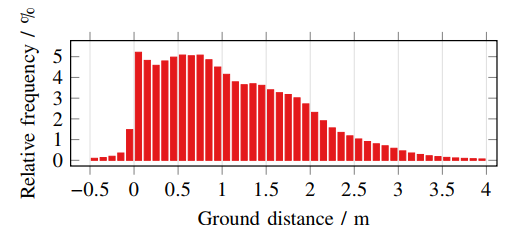
圖4:非地面點的地面距離直方圖。
我們從直方圖中觀察到非地面點存在嚴(yán)重偏差,均值為1.09米,并且高度范圍較大,從估計曲面以下到約4米。請注意,負(fù)的地面距離可能是由于控制點距離為2米和平滑度權(quán)重為1造成的,一方面可以減少對內(nèi)點的過擬合,但另一方面會增加對地面曲面突變的平滑。
圖5比較了不同魯棒性方法在兩種設(shè)置下對優(yōu)化的影響。一方面,我們展示了僅使用地面點時的影響,另一方面是當(dāng)所有點都用于優(yōu)化時的影響。在兩個實驗中,我們保留了10%的地面點進(jìn)行驗證。我們觀察到TLS方法在存在異常值時產(chǎn)生了最佳結(jié)果。TLS方法的最佳誤差閾值似乎在20厘米到60厘米的范圍內(nèi)。GMC方法并不總是比普通的最小二乘(OLS)基準(zhǔn)方法產(chǎn)生更好的結(jié)果。這可能是因為GMC方法在5次迭代內(nèi)無法收斂。

圖5:僅使用標(biāo)記的地面點進(jìn)行優(yōu)化時,估計地面曲面與地面驗證點之間的絕對高度誤差(上圖),以及包括所有點進(jìn)行優(yōu)化時的誤差(下圖)。左側(cè):所有驗證點的平均值。右側(cè):在距離傳感器的5米間隔內(nèi)進(jìn)行平均。
C 實驗車輛
實驗車輛是一輛梅賽德斯-奔馳E級豪華轎車,如圖8所示,車頂裝有四個Velodyne VLP16激光雷達(dá),車頂中心裝有一個Velodyne VLS128激光雷達(dá),前標(biāo)牌下方還裝有一個Ibeo LUX4L激光雷達(dá)。
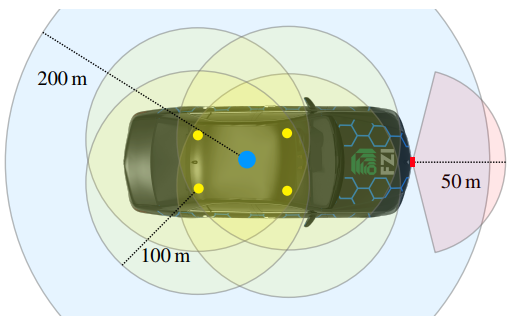
圖8:實驗車輛上的傳感器設(shè)置俯視圖。非按比例縮放。黃色:VLP16,藍(lán)色:VLS128,紅色:LUX4L。
圖9總結(jié)了根據(jù)控制點在一個150 m×100 m的區(qū)域內(nèi)的計算速率。例如,如果地面表面估計應(yīng)該以至少10 Hz的速率處理測量數(shù)據(jù),則控制點的數(shù)量應(yīng)小于3750個,或者換句話說,在這個區(qū)域內(nèi)的控制點距離應(yīng)至少為2 m。
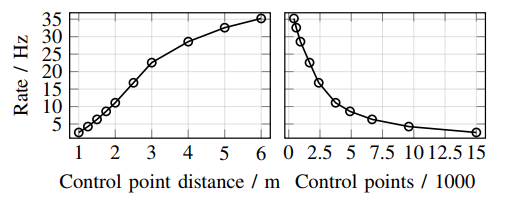
圖9:實驗車輛上的地面表面估計處理速率,取決于在一個150米×100米區(qū)域內(nèi)的控制點數(shù)量。
圖10顯示了實驗車輛上所有安裝的LiDAR傳感器進(jìn)行全角度掃描的點集,以及在德國卡爾斯魯厄市行駛過程中估計的地面表面,觀察到地面表面可以準(zhǔn)確地估計出來,基于得到的地面表面,能夠通過應(yīng)用簡單的基于距離的分類器來區(qū)分地面和非地面點。
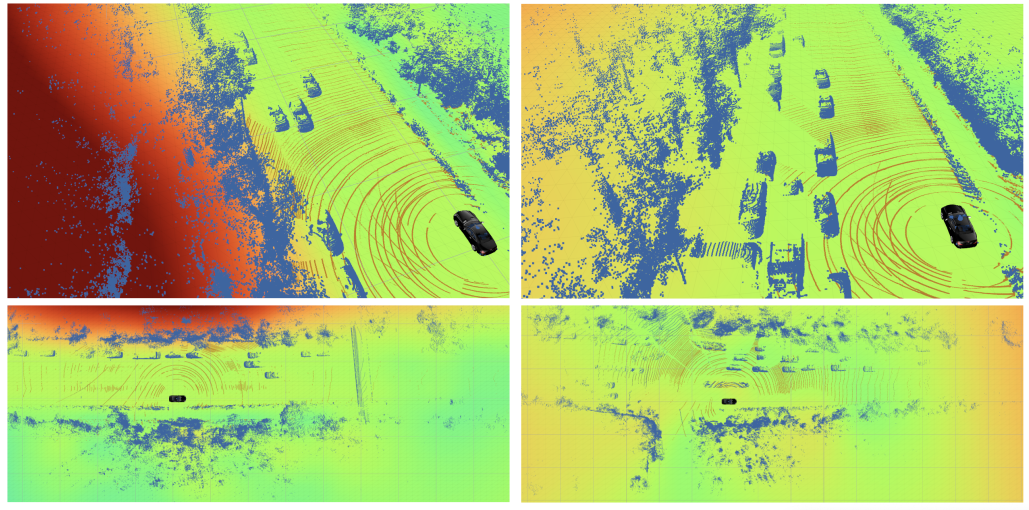
圖10:實驗車輛上所有LiDAR傳感器進(jìn)行全角度掃描的點集和估計的地面表面。點集按照與地面表面的距離進(jìn)行著色,棕色表示距離小于10 cm,藍(lán)色表示距離大于10 cm。地面表面按照相對于車輛參考框架的高度進(jìn)行著色。
總結(jié)
本文提出了一種從嘈雜的點集表示的點云數(shù)據(jù)中估計地面表面的方法,在該方法中將地面表面建模為UBS,UBS隱式地實現(xiàn)了光滑性,并且對局部變化的測量密度不敏感,借助魯棒優(yōu)化技術(shù)和UBS表面模型,能夠在廣泛的距離范圍內(nèi)準(zhǔn)確估計地面表面,利用這個地面表面估計,我們能夠區(qū)分地面和障礙物表面的反射,從而可以相對于地面表面對交通場景進(jìn)行建模。
-
數(shù)據(jù)集
+關(guān)注
關(guān)注
4文章
1223瀏覽量
25278 -
LIDAR
+關(guān)注
關(guān)注
10文章
342瀏覽量
30157
原文標(biāo)題:均勻B樣條采樣從LiDAR數(shù)據(jù)中快速且魯棒地估計地平面
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
電源/地平面對的模型
接地平面(轉(zhuǎn)載)(不針對PCB板天線)
【高速PCB布線指南3】接地平面漫談
一種n次均勻B樣條曲線細(xì)分算法
測地B樣條曲線的生成
魯棒性是什么意思_Robust為什么翻譯成魯棒性
空間曲線基于內(nèi)在幾何量的均勻采樣方法

一種空間曲線基于內(nèi)在幾何量的均勻采樣方法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論