 安信可Rd-01人體感應模組上手教程
安信可Rd-01人體感應模組上手教程
安信可Rd-01人體感應模組上手教程來啦,享受毫米波雷達帶來的極致體驗~
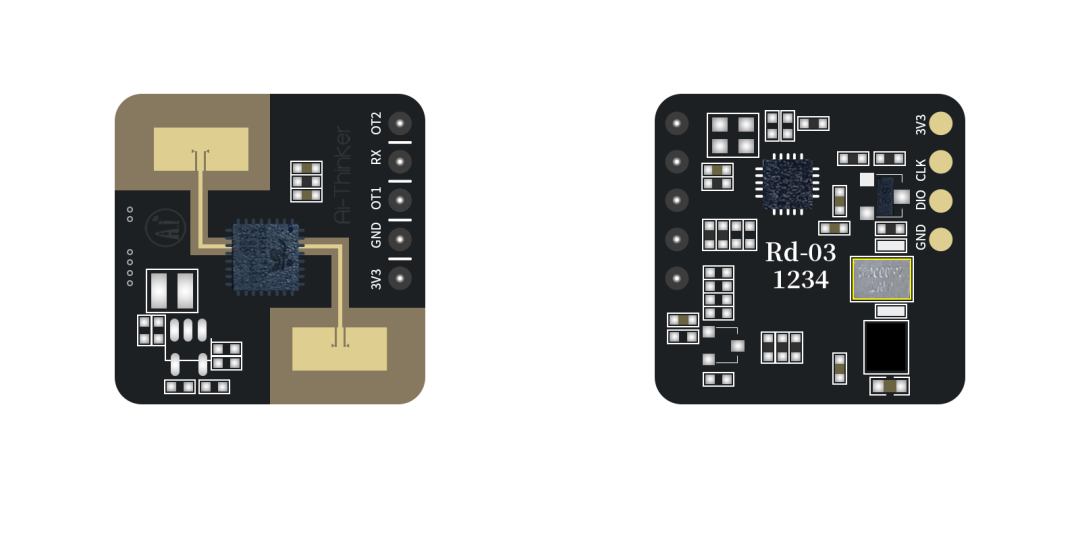
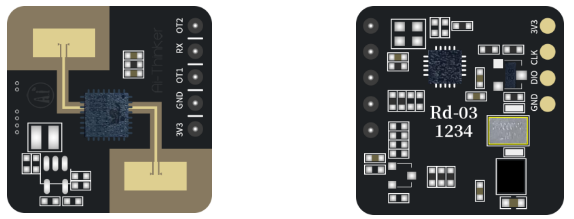
01模組相關介紹
Rd-01人體感應模組的工作原理是利用FMCW調頻連續波,對設定空間內的人體目標進行探測,結合雷達信號處理、精確人體感應算法,實現高靈敏度的人體存在狀態感應,可識別運動和靜止狀態下的人體,并可計算出目標的距離等輔助信息。
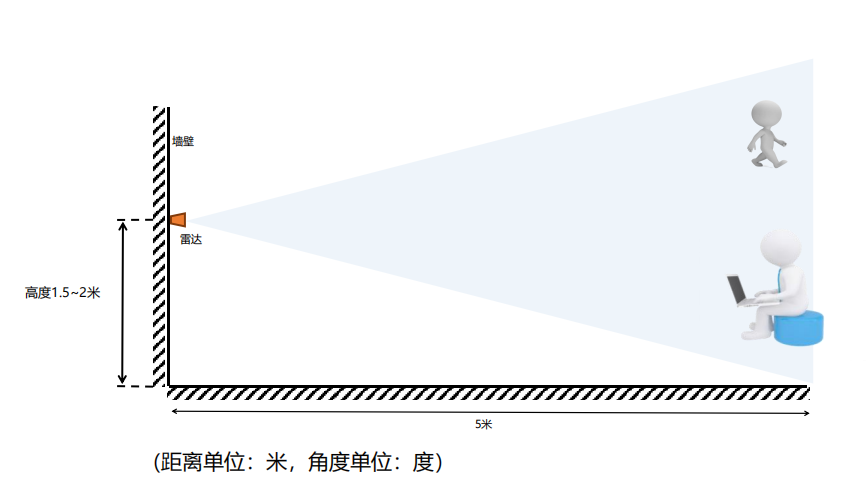
本產品主要應用在室內場景,感知區域內是否有運動或者微動的人體,實時輸出檢測結果。最遠感應距離可達5米,距離分辨率0.75m。提供可視化的配置工具,可輕松配置感應距離范圍、不同區間的感應靈敏度和無人延時時間等,適應不同的具體應用需求。
支持 GPIO 和 UART 輸出,即插即用,可靈活應用于不同的智能場景和終端產品。
02應用場景
Rd-01人體感應模組對運動、微動和站立、坐臥的人體均可進行探測識別,支持多級調參,可廣泛應用于 AIoT 各種場景,常用類型如下:
人體感應燈控
感知所在空間是否有人存在,自動控制燈光,如公共場所照明設備、各類感應燈、球泡燈等。
廣告屏等設備的人體感應喚醒
人來自動開啟,無人自動休眠節電,信息投放更精準高效。
生命安全防護
UV燈工作保護,防止UV燈在周邊有人時開啟對人身造成傷害;
危險場所自動檢測告警,防止有人進入特定高危空間,如煤礦爆破的禁止人員進入的高危場所。
智能家電
房間內長時間無人,電視空調等電器自動關閉,節能又安全。
智能安防
對指定范圍內有人侵入、逗留等的檢測識別。
03使用和配置
出廠固件獲取
下載鏈接:固件下載
模組接線
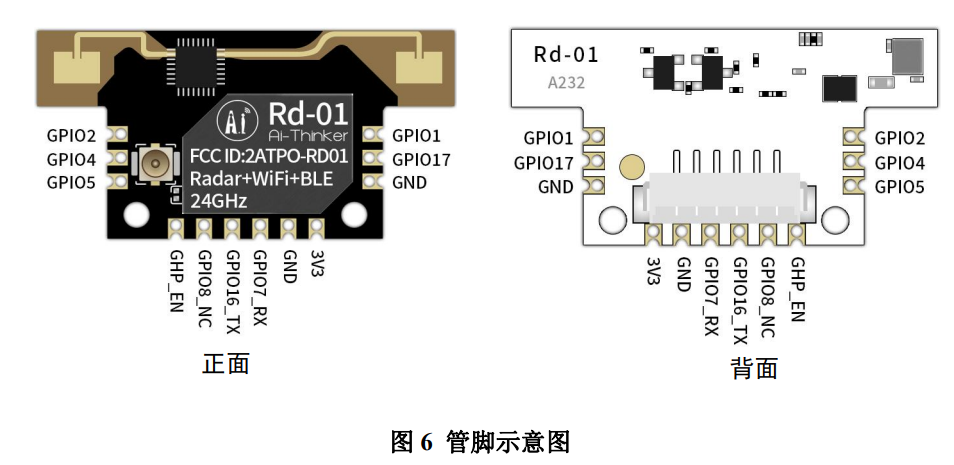

| Rd-01 | USB轉TTL |
|---|---|
| 3V3 | Vo(靠近TXD的) |
| GND | GND |
| GPIO7_RX | TXD |
| GPIO16_TX | RXD |
| CHP_EN | RTS |
可視化配置工具說明
為便于用戶快速高效的對模塊進行測試和配置,提供PC端的上位機配置工具,用戶可使用此工具軟件連接模塊的串口,對模塊進行參數讀取和配置,也可接收模塊上報的探測結果數據,并進行實時的可視化展示,極大的方便了用戶的使用。
可視化配置工具下載鏈接:下載
可視化配置工具使用方法:
1、用USB轉串口工具正確連接模組串口;
2、上位機工具中選中對應的串口號,設置波特率256000,選中工程模式,點擊連接設備;
3、連接成功后,點擊開始按鈕,右側圖形界面會顯示檢測結果和數據;
4、在連接上后,未點擊開始按鈕時,或者開始后點擊停止,可對模式參數信息進行讀取或設置;
注意:點擊開始后不能對參數進行讀取和配置,需停止后才可進行配置。
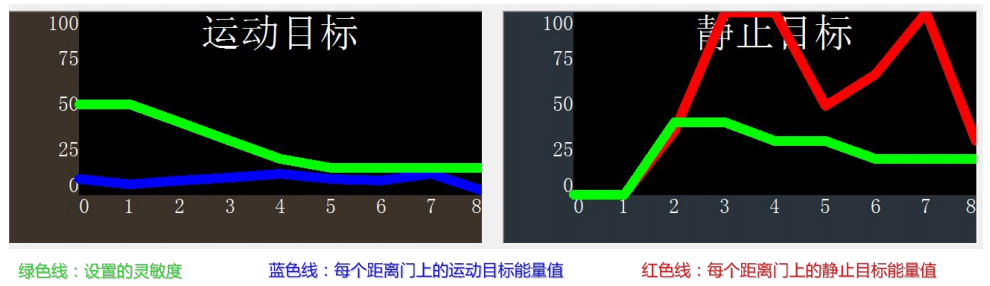
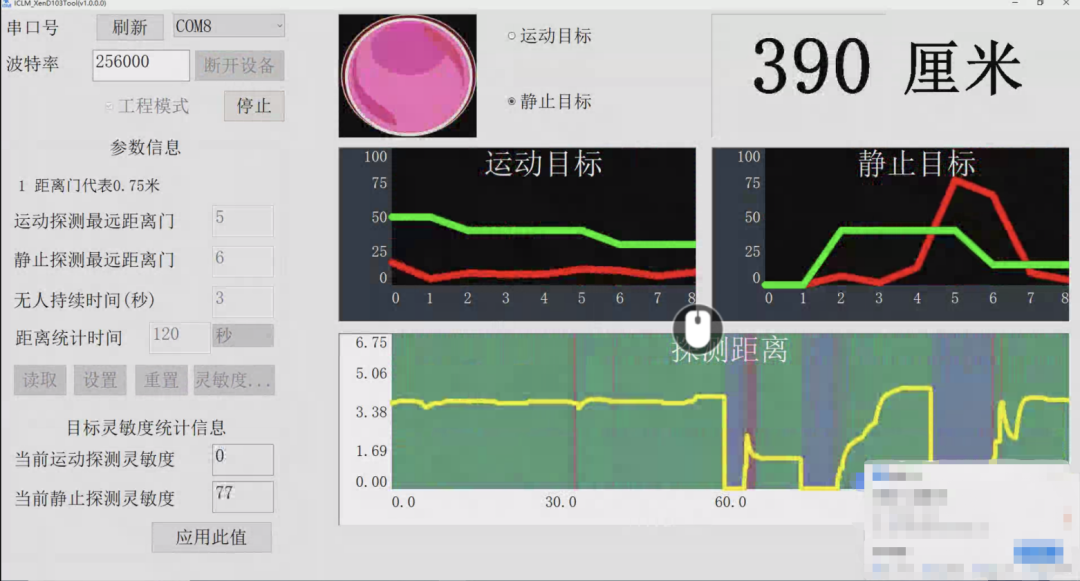
可視化配置工具的界面和常用功能如下圖:
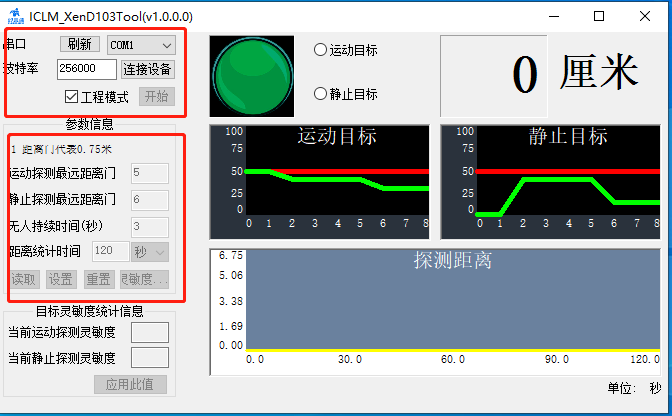
圓球為目標狀態輸出指示:紅色代表有人為運動目標,紫色代表有人為靜止目標;綠色代表無人
配置參數的作用
用戶可通過Rd-01的串口給模塊修改配置參數,來適應不同的應用需求,配置內容掉電不丟失。可配置的參數包括如下幾個:
最遠探測距離
設置最遠可探測的距離,只有在此最遠距離內出現的人體目標才會被探測到并輸出結果。
以距離門為單位進行設置, 每個距離門為0.75m。
包括運動探測最遠距離門和靜止探測最遠距離門,可設置范圍為1~8,例如設置最遠距離門為2,則只有在1.5m內有人體存在才會有效探測到并輸出結果。
靈敏度
探測到的目標能量值(范圍0~100)大于靈敏度值時才會判定為目標存在,否則忽略。
靈敏度值可設置范圍0~100。每個距離門可獨立設置靈敏度,即可對不同距離范圍內的探測進行精準調節,局部精準探測或對特定區域干擾源的過濾。
另外如果將某個距離門的靈敏度設置為100時,可達到不識別此距離門下目標的效果。例如將距離門3和距離門4的靈敏度設置為20,其他距離門的靈敏度都設置為100,則可實現僅對距離模塊2.25~3.75m范圍內的人體進行探測。
無人持續時間
雷達在輸出從有人到無人的結果中,會持續一段時間上報有人,若在此時間段雷達測試范圍內持續無人,雷達上報無人;若在此時間段雷達檢測到有人,則重刷新此時間,單位為秒。相當于無人延時時間,人離開后,保持無人超過此持續時間后才會輸出狀態為無人。
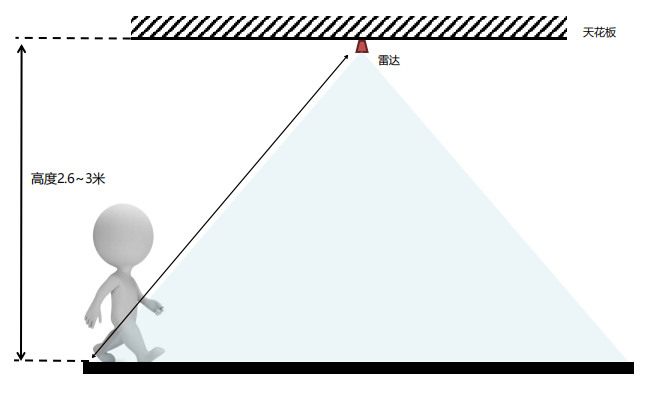
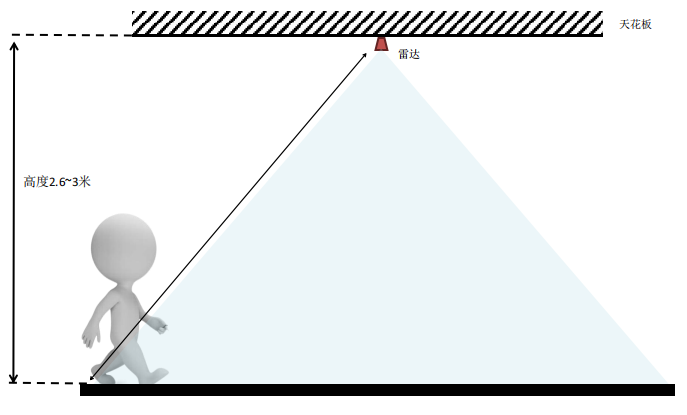
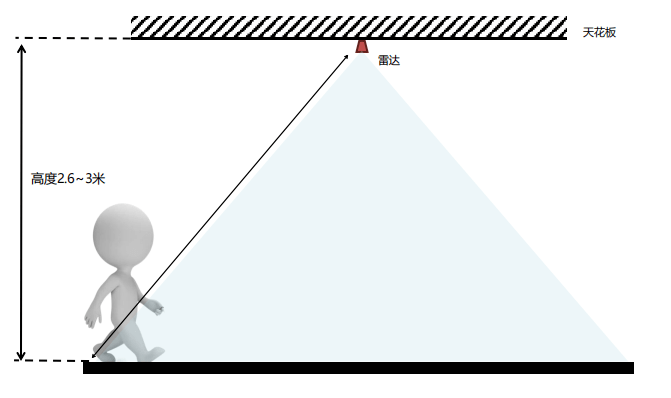
安裝方式和感應范圍
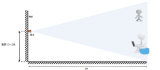
1、掛頂安裝示意圖
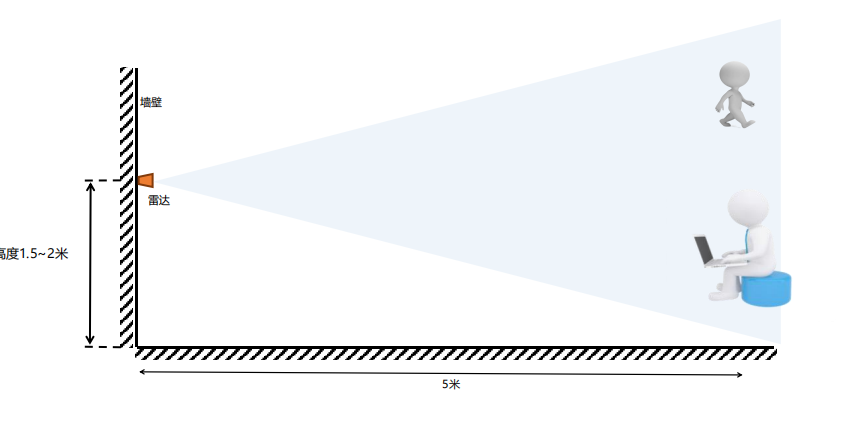
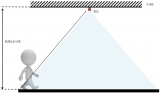
2、掛壁安裝示意圖
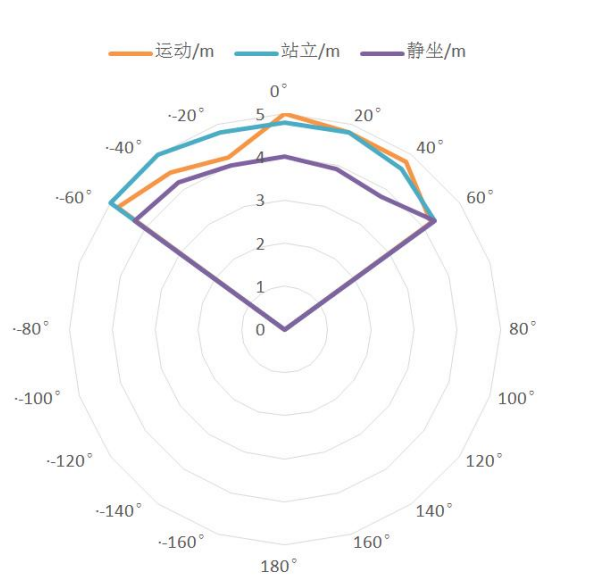
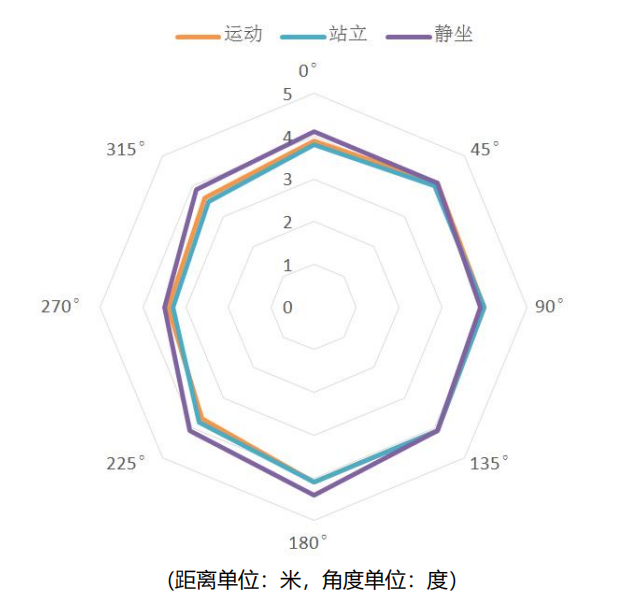
模組實際測試效果圖
審核編輯:湯梓紅
-
雷達
+關注
關注
50文章
3083瀏覽量
119453 -
人體感應
+關注
關注
3文章
65瀏覽量
17243 -
模組
+關注
關注
6文章
1613瀏覽量
31158 -
GPIO
+關注
關注
16文章
1276瀏覽量
53608 -
安信可
+關注
關注
0文章
184瀏覽量
4370
原文標題:上手快!Rd-01人體感應模組詳細教程
文章出處:【微信號:安信可科技,微信公眾號:安信可科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
安信可Rd-01模組雷達技術解析


安信可Ai-Thinker Rd-01 24G人體存在感應模組,幫助客戶低成本實現智能化!

高精度識別人體微動、運動!安信可Ai-Thinker24G人體感應雷達模組 Rd-03 重磅首發


安信可推出10G雷達模組Rd-04,支持感應人體微動/運動

安信可雷達模組怎么選?看這篇,不踩雷!






 工商網監
工商網監
評論