") 如何使用高光譜激光雷達(dá)平臺(tái)用于監(jiān)測(cè)昆蟲(chóng)多樣性
如何使用高光譜激光雷達(dá)平臺(tái)用于監(jiān)測(cè)昆蟲(chóng)多樣性
監(jiān)測(cè)昆蟲(chóng)種群是了解自然生態(tài)系統(tǒng)的重要組成部分,特別是當(dāng)這些種群因農(nóng)藥使用或氣候變化而出現(xiàn)下降時(shí)。一種基本方法是捕獲活昆蟲(chóng)進(jìn)行識(shí)別,這是一個(gè)相對(duì)耗時(shí)且昂貴的過(guò)程,但現(xiàn)在正在將更先進(jìn)的光子探測(cè)技術(shù)應(yīng)用于這項(xiàng)任務(wù)。
據(jù)麥姆斯咨詢(xún)報(bào)道,丹麥NKT Photonics和瑞典隆德大學(xué)(Lund University)研究了如何使用高光譜激光雷達(dá)平臺(tái)來(lái)計(jì)數(shù)昆蟲(chóng)、測(cè)量其翅膀拍動(dòng)的頻率,以及解析翅膀的相干散射以區(qū)分不同的物種。該研究結(jié)果以“Remote Nanoscopy with Infrared Elastic Hyperspectral Lidar”為題發(fā)表在Advanced Science期刊上,可能徹底改變昆蟲(chóng)監(jiān)測(cè)現(xiàn)狀。
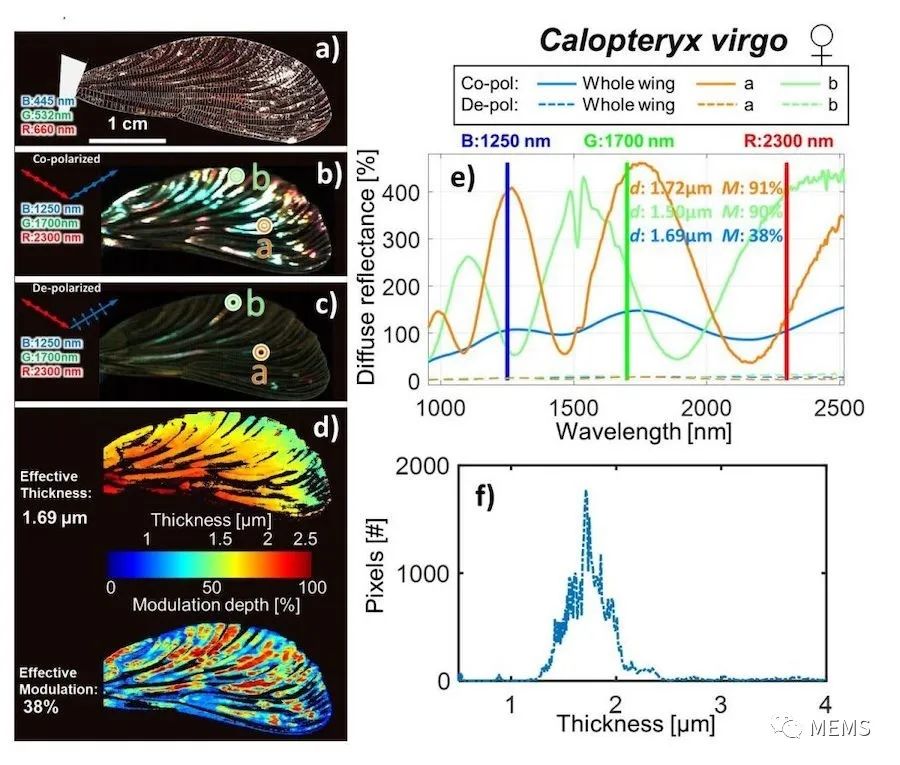
豆娘翅膀的紅外高光譜成像(可以根據(jù)數(shù)據(jù)評(píng)估翅膀厚度并識(shí)別昆蟲(chóng))
研究人員開(kāi)發(fā)的平臺(tái)采用了一種稱(chēng)為彈性高光譜Scheimpflug激光雷達(dá)(EHSL)的技術(shù)。Scheimpflug原理最初源自航空攝影,涉及鏡頭和探測(cè)器相對(duì)于彼此傾斜,從而增加系統(tǒng)可以實(shí)現(xiàn)的焦深。
在圖像傳感器根據(jù)Scheimpflug原理定向的激光雷達(dá)系統(tǒng)中,指向大氣的激光束的反向散射可以到達(dá)傾斜的傳感器,所有反向散射回波同時(shí)聚焦,這是一條通過(guò)大光學(xué)孔徑達(dá)到理論上無(wú)限焦深的途徑。
在瑞典南部的試驗(yàn)中,NKT Photonics和隆德大學(xué)搭建了其實(shí)驗(yàn)設(shè)備,讓夜間活動(dòng)的昆蟲(chóng)穿過(guò)固定的激光束,并記錄與昆蟲(chóng)的距離和反射光譜數(shù)據(jù)。該項(xiàng)目研究人員說(shuō)道:“昆蟲(chóng)翅膀是一種薄膜。當(dāng)激光照射到昆蟲(chóng)翅膀時(shí),一些光從第一個(gè)表面反射,一些光穿過(guò)翅膀后從第二個(gè)表面反射。這會(huì)產(chǎn)生翅膀干涉圖案。”
不同的昆蟲(chóng)物種具有特定的翅膀拍打頻率和翅膀干涉圖案,并且從這兩種特征屬性捕獲數(shù)據(jù)可以使區(qū)分自然棲息地中的數(shù)百種自由飛行的昆蟲(chóng)物種成為可能。
實(shí)驗(yàn)監(jiān)測(cè)平臺(tái)采用連續(xù)波Scheimpflug激光雷達(dá)以及同一架構(gòu)的非彈性高光譜版本,該版本之前已在熒光模式下開(kāi)發(fā)和使用。項(xiàng)目研究團(tuán)隊(duì)表示,在激光雷達(dá)中結(jié)合光譜技術(shù)可以檢索遠(yuǎn)距離的微小特征。
該項(xiàng)目在其發(fā)表的論文中表示:“此前已通過(guò)偏振激光雷達(dá)和雙頻激光雷達(dá)遠(yuǎn)程探昆蟲(chóng)測(cè)翅膀拍打。但到目前為止,還沒(méi)有遠(yuǎn)程設(shè)備能夠捕捉到翅膀干涉圖案,通過(guò)光譜解析并唯一地確定翅膀厚度。”
該項(xiàng)目證明,新方法在夜間部署在野外時(shí),成功捕獲了飛行中昆蟲(chóng)的翅膀拍打信號(hào),并為遠(yuǎn)程獲取納米級(jí)精度的昆蟲(chóng)翅膀厚度提供了可能性。
研究人員表示:“到目前為止,用于檢測(cè)自由飛行昆蟲(chóng)的激光雷達(dá)技術(shù)主要依賴(lài)于翅膀拍打模式的頻率分析,這需要在光束傳輸過(guò)程中進(jìn)行多次翅膀拍打。我們的EHSL技術(shù)原則上可以通過(guò)單次微秒閃光(flash)來(lái)確定翅膀厚度。”
其它形式的光學(xué)遙感或環(huán)境監(jiān)測(cè)也可以利用基于相同原理的探測(cè)設(shè)備。該項(xiàng)目指出,用于植被冠層的高光譜激光雷達(dá)可以改善樹(shù)種分類(lèi)并報(bào)告葉子水分、施肥或內(nèi)部葉子結(jié)構(gòu),同時(shí)也可以對(duì)溫室氣體和其它分子進(jìn)行大氣傳感。
審核編輯:劉清
-
探測(cè)器
+關(guān)注
關(guān)注
14文章
2688瀏覽量
74049 -
圖像傳感器
+關(guān)注
關(guān)注
68文章
1951瀏覽量
130305 -
光譜儀
+關(guān)注
關(guān)注
2文章
1033瀏覽量
31394 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4159瀏覽量
191677
原文標(biāo)題:紅外高光譜激光雷達(dá)用于監(jiān)測(cè)昆蟲(chóng)多樣性
文章出處:【微信號(hào):MEMSensor,微信公眾號(hào):MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
探索高光譜成像在生物多樣性保護(hù)中的作用
基于空譜特征優(yōu)化選擇的高光譜激光雷達(dá)地物分類(lèi)
高光譜成像激光雷達(dá)系統(tǒng)實(shí)現(xiàn)遠(yuǎn)程塑料識(shí)別

一則消息引爆激光雷達(dá)行業(yè)!特斯拉竟然在自研激光雷達(dá)?
激光雷達(dá),明年要降價(jià)至200美元

Mobileye牽手Innoviz合作激光雷達(dá)用于其Mobile Drive平臺(tái)
激光雷達(dá)會(huì)傷害眼睛嗎?

激光雷達(dá)的維護(hù)與故障排查技巧
激光雷達(dá)在農(nóng)業(yè)中的創(chuàng)新應(yīng)用
如何提升激光雷達(dá)數(shù)據(jù)的精度
激光雷達(dá)技術(shù)的發(fā)展趨勢(shì)
光學(xué)雷達(dá)和激光雷達(dá)的區(qū)別是什么
激光雷達(dá)點(diǎn)云數(shù)據(jù)包含哪些信息
無(wú)人機(jī)高光譜影像與冠層樹(shù)種多樣性監(jiān)測(cè)
基于FPGA的激光雷達(dá)控制板






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論