 通過STM32實現PWM呼吸燈的教程
通過STM32實現PWM呼吸燈的教程

一,知識理論基礎
什么是呼吸燈:
顧名思義,就是一個燈。燈的亮度的變化,由亮變暗,從暗變亮,有一個漸變,規律的變化,像是人的呼吸,是燈的呼吸,所以叫呼吸燈。而要讓燈可以達到這樣的變化,我們要讓stm32的IO口上輸出一個可調的電平,這時我們就要用到PWM,那什么是PWM呢,我們繼續往下看。
什么是定時器:
講PWM我們要先認識stm32的定時器,PWM是定時器的功能之一。STM32F103有TIME1和TIME8高級定時器,TIME2TIME5通用定時器,還有TIME6和TIME7基本定時器。我們要使用的STM32F103C8T6只具有4個定時器,TIME1TIME4.
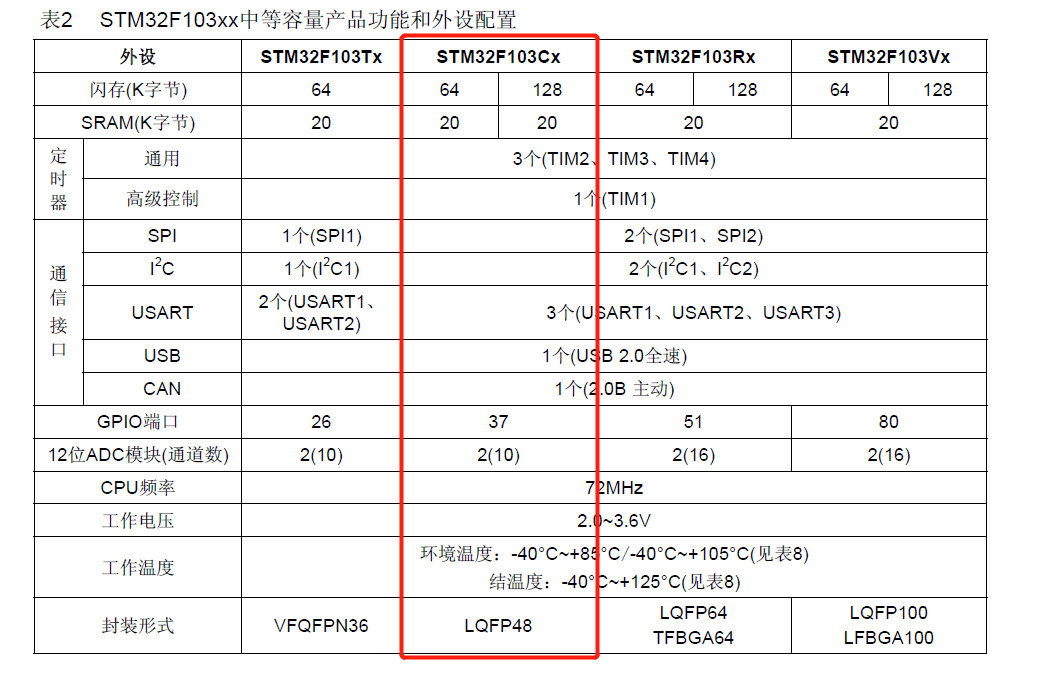
那么定時器有什么功能呢?定時、輸出比較、輸入捕獲、互補輸出,其中,基本定時器就只有定時功能,通用定時器便除了互補輸出沒有其他都有,而高級定時器便是全都有啦,我們這里用到通用定時器TIM2。
通用定時器具體的功能有:
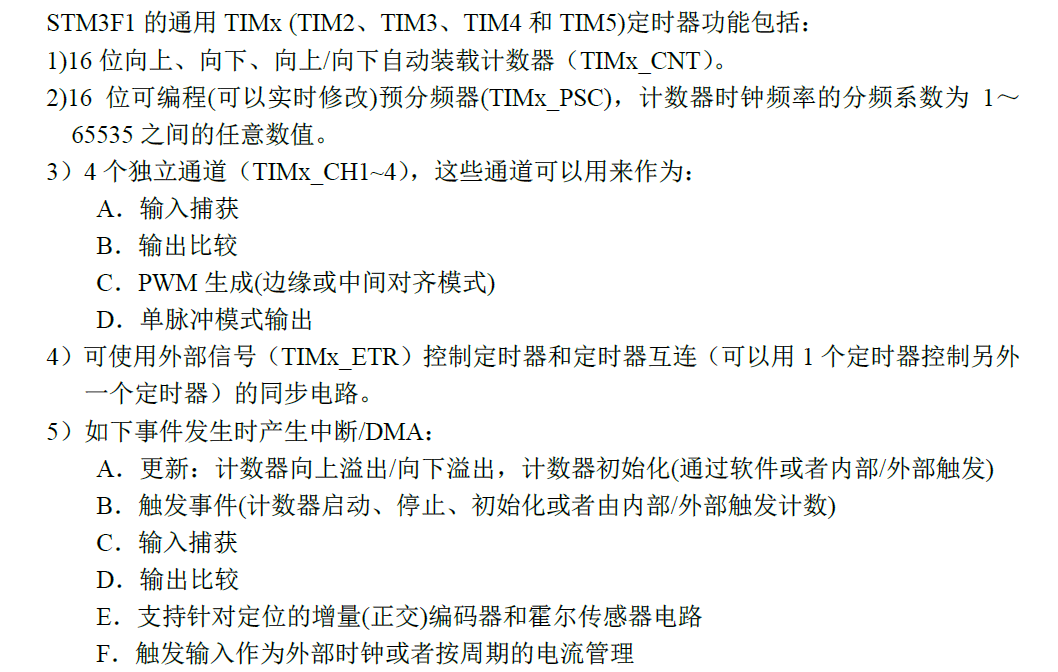
在這里我們要用到TIM2_CH2的PWM輸出功能。
那么什么是PWM呢?
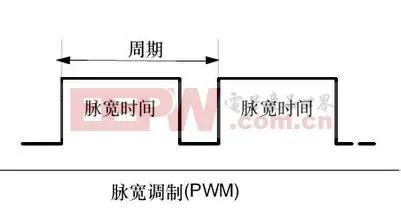
脈沖寬度調制(PWM),是英文“Pulse Width Modulation”的縮寫,簡稱脈寬調制,是利用微處理器的數字輸出來對模擬電路進行控制的一種非常有效的技術。簡單一點,就是對脈沖寬度的控制。
簡單點說就是一個可調的脈沖,控制在一個周期內,控制高電平多長時間,低電平多長時間(占空比),從而實現電平的輸出。經常用于舵機、電機控制等。。。
兩個重要的概念,頻率、占空比:
頻率是指每秒鐘信號從高電平到低電平再回到高電平的次數,為一個PWM波周期的倒數。
占空比是指高電平持續時間比一個周期持續的時間。所以可以通過控制占空比(我們要編程的“數”),來控制輸出的等效電壓。
對于方波(pwm輸出的就是方形波)的話,頻率和占空比就確定了一個波。
為了不至于太難理解,我們不進行深講,但是建議大家可以去CSDN,百度等等平臺進行全面一點的認知,對我們下學期的智能車比賽做基礎知識儲備。
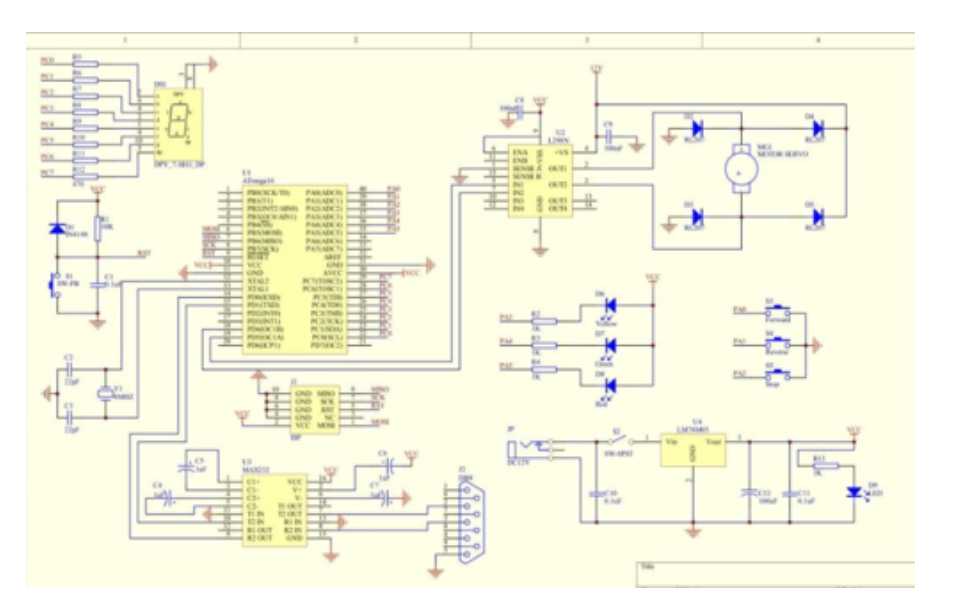
**二,**硬件連接
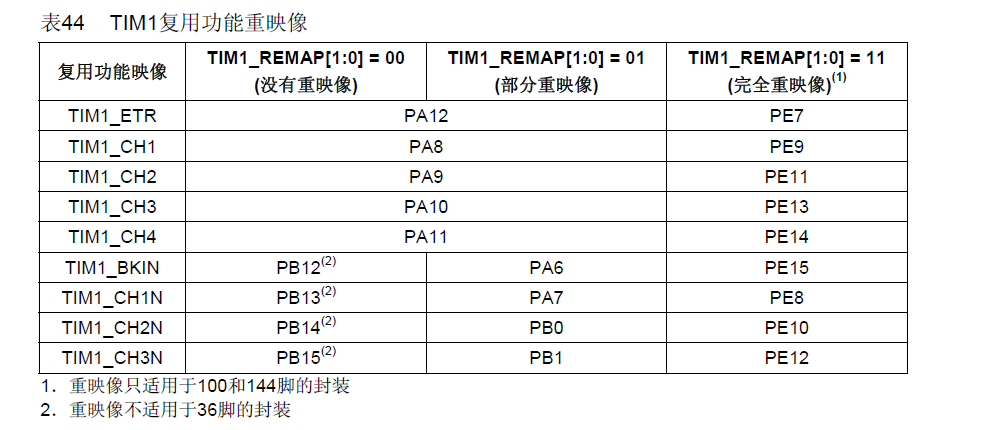
具有定時器功能的引腳:
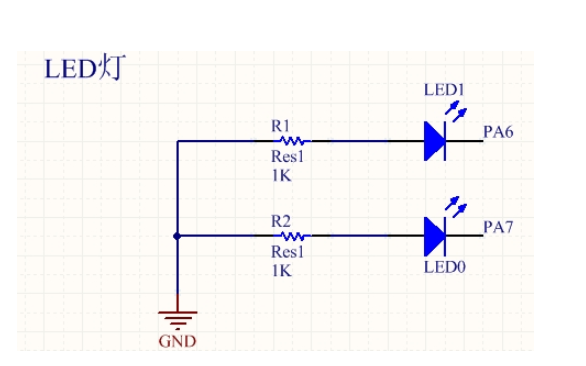
LED連接:
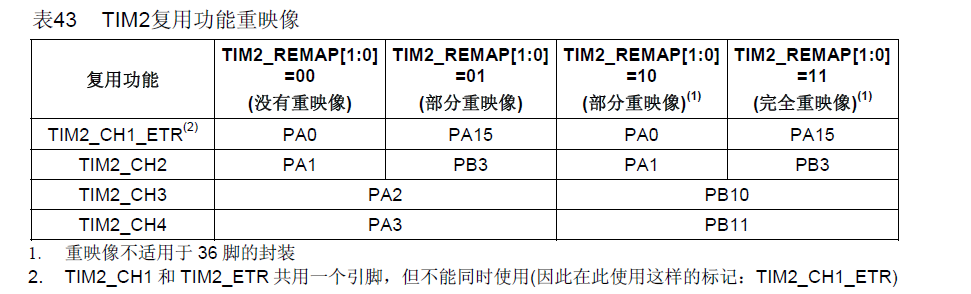
我們用到TIM2_CH2,自己實操時可以換一個以達到更好的學習效果。通過圖二,我們在默認情況下(即不使用端口映射)TIM2_CH2對應的IO口是PA1,我們將PWM輸出極性設置為高,便將LED的正極接到PA1上,負極接GND,(若將輸出極性設置成低那就反過來接,將負極接到IO口,,正極接5V)
三,軟件編程
首先我們在工程中HARDWARE文件夾下新建PWM文件夾并新建PWM.c PWM.h兩個文件,導入mdk5,具體操作省略,可以看前邊推文。我們將PWM的初始化函數寫到PWM.c的文件中函數命名為“TIM2_PWM_Init”(可以隨意命名)。
我們先從簡單的講起,PWM.h頭文件沒什么重點,如下:
#ifndef __PWM_H
#define __PWM_H
#include "sys.h" //導入頭文件
void TIM2_PWM_Init(u16 arr,u16 psc); //函數聲明
#endif
這里要說的是因為用到了u16 的數據類型定義我們要導入一個頭文件“sys.h”(u8,u16,u32都是C語言數據類型,分別代表8位,16位,32位長度的數據類型,這里也可以直接調用"stm32f10x.h")
接下來是編寫PWM.c文件,編寫初始化 “void TIM2_PWM_Init(u16 arr,u16 psc);”函數,函數參數為arr重裝載值決定pwm的頻率周期,psc是時鐘預分頻數(主要用于計算時間范圍為0-65534),這里有一條公式可以計算周期時間Tout= (arr+1)*(psc+1) /Tclk,其中Tclk我們用的TIM2是系統內部APB1時鐘倍頻來的,(固件庫的SystemInit函數里面已經初始化APB1的時鐘為2分頻,所以APB1的時鐘為36M,而從STM32的內部時鐘樹圖得知:當APB1的時鐘分頻數為1的時候,TIM27的時鐘為APB1的時鐘,而如果APB1的時鐘分頻數不為1,那么TIM27的時鐘頻率將為APB1時鐘的兩倍。因此,TIM2的時鐘為72M,即 Tclk=72M)
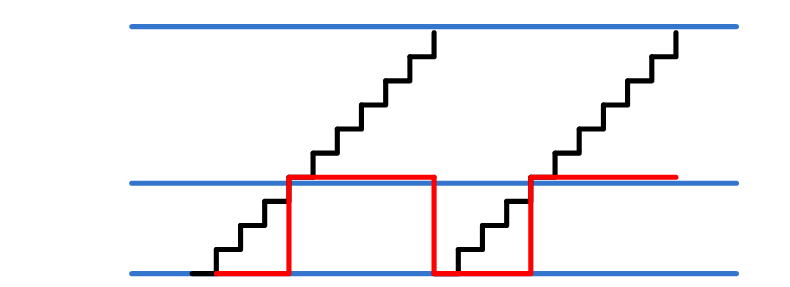
接下來我們先說說PWM的模式,PWM有兩個模式,PWM1和PWM2,PWM1是當我們設定的值比arr值小時輸出高電平,PWM2是當我們設定的值比arr值大時輸出高電平。如下圖就是PWM2模式。
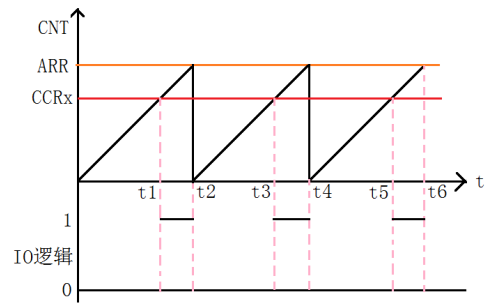
我們從圖出發,可以看到為什么說ARR值決定周期,定時器從0開始計數(這里是向上計數模式,向下計數則相反,也是上邊公式為什么要+1),數到ARR時產生溢出(更新)事件(可以從這個地方設置中斷,本次用不到中斷,不進行講解),重新回到0 ,這便是一個周期,我們要設置的值便是圖中CCRx,這個值會跟ARR進行比較(所以叫輸出比較),通過模式設定決定輸出高低電平。(為了不至于太難理解請一定結合上圖一起看)。我們先看看完整的代碼,然后一個一個函數講PWM.c
#include "PWM.h"
void TIM2_PWM_Init(u16 arr,u16 psc)
{
//結構體變量定義
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
GPIO_InitTypeDef GPIO_InitStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
//時鐘使能 TIM2 、GPIOA、 AFIO ①
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //使能TIM2掛載在APB1上的時鐘
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //使能GPIOA、復用功能時鐘AFIO
//TIM2定時器初始化 ②
TIM_TimeBaseInitStruct.TIM_Period=arr; //重裝載值arr
TIM_TimeBaseInitStruct.TIM_Prescaler=psc; //預分頻值psc
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up; //向上計數模式
TIM_TimeBaseInitStruct.TIM_ClockDivision=0; //時鐘分割為0 ,TDTS = Tck_tim
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct);
//TIM2定時器使能
TIM_Cmd(TIM2,ENABLE);
//TIM2通道2初始化 ③
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM1; //PWM模式1
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High; //高電平有效
TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable; //輸出比較使能
TIM_OC2Init(TIM2,&TIM_OCInitStruct);
//TIM2通道2預裝載寄存器使能
TIM_OC2PreloadConfig(TIM2,TIM_OCPreload_Enable);
//GPIO PA1初始化 ④
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP; //復用推挽輸出
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_1; //PA.1
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; //50MHz速度
GPIO_Init(GPIOA,&GPIO_InitStruct);
}
首先我們先總結一下初始化pwm輸出的編程步驟:
步驟介紹
使能時鐘
初始化定時器
初始化定時器通道
初始化GPIO
現在我們一個點一個點的講解:
使能時鐘,這里 GPIO掛載在APB2總線上,之前文章說過,而我們要用到的TIM2是掛載在APB1上的,所以我們要使能的時鐘是RCC_APB1,這里要注意的是通用定時器是掛載在APB1上,高級定時器則是在APB2上。【補充:時鐘函數的申明在stm32f10x_rcc.h,這里是上一講寫少了的】
這里我們要寫的代碼是:
//時鐘使能 TIM2 、GPIOA、 AFIO ①
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //使能TIM2掛載在APB1上的時鐘
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //使能GPIOA
初始化定時器,初始化定時器跟初始化GPIO的操作類似,我們先看看要用到的函數【定時器相關函數申明在文件stm32f10x_time.h中】:
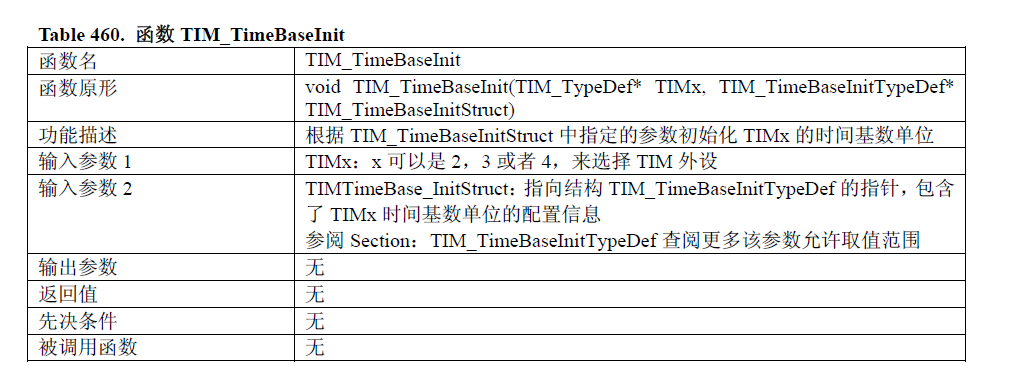
這里函數的兩個參數一個是TIMx ,x可以是2,3,4,說明這個初始化函數只適用在通用定時器初始化上,第二個參數是一個結構體變量,里邊的成員有:
typedef struct
{
uint16_t TIM_Prescaler; //預分頻值
uint16_t TIM_CounterMode; //計數模式
uint16_t TIM_Period; // 重裝載值
uint16_t TIM_ClockDivision; //時間分割
uint8_t TIM_RepetitionCounter; //重復計數,就是重復溢出多少次才給你來一個溢出中斷,如果初始化為0的話,計數器溢出一次,中斷一次!
} TIM_TimeBaseInitTypeDef;
其中預分頻值跟重裝載值上邊講過了,計數模式有向上計數、向下計數、中央對齊模式(中央對齊模式有模式1、2、3),這里我們用到向上計數模式,對于向上計數模式在上邊有講過了,便是從0計數到ARR重裝載值,而向下計數的話便是從ARR計數到0。時間分割主要是用于數字濾波器相關,我們在此用不到只要設置為0就好了,重復計數模式,在這里我們用不到,上邊注釋有稍微講了一下,可以自行再了解一下。所以這里我們要設置參數如下:
TIM_TimeBaseInitStruct.TIM_Period=arr; //重裝載值arr
TIM_TimeBaseInitStruct.TIM_Prescaler=psc; //預分頻值psc
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up; //向上計數模式
TIM_TimeBaseInitStruct.TIM_ClockDivision=0; //時鐘分割為0 ,TDTS = Tck_tim
ARR值與psc值我們作為參數,在調用時再進行設置。所以完整的初始化函數
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct; //定義結構體變量
TIM_TimeBaseInitStruct.TIM_Period=arr; //重裝載值arr
TIM_TimeBaseInitStruct.TIM_Prescaler=psc; //預分頻值psc
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up; //向上計數模式
TIM_TimeBaseInitStruct.TIM_ClockDivision=0; //時鐘分割為0 ,TDTS = Tck_tim
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct);
之后我們要對定時器使能,使用void TIM_Cmd();(省略參數)
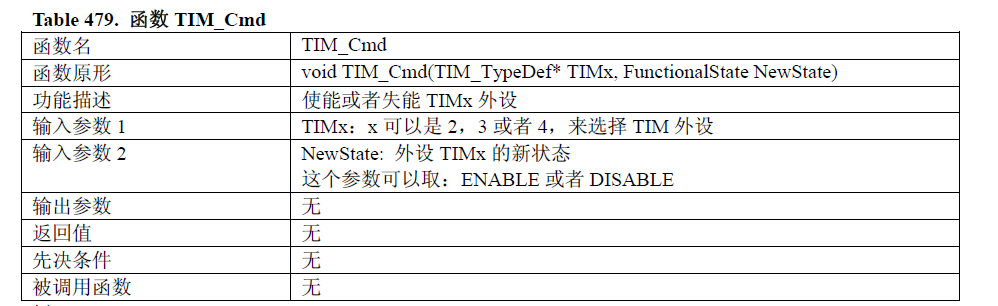
同樣,這個函數適用于通用定時器,使用比較簡單,如下:
TIM_Cmd(TIM2,ENABLE);
這里第2步就寫完了。
初始化定時器通道,通用定時器有4個通道上邊圖3有進行講解,這里我們要用到是通道2即TIM2_CH2;每一個定時器通道都有單獨的初始化函數。

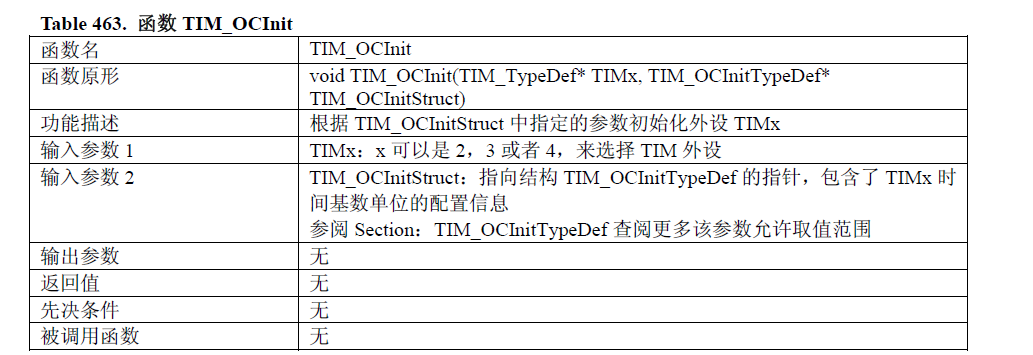
一樣是有兩個參數,一個是定時器TIMx(同樣是只適用通用定時器2 3 4),一個是結構體變量,我們看看結構體變量里的成員。
typedef struct
{
uint16_t TIM_OCMode; //輸出模式
uint16_t TIM_OutputState; //輸出比較使能位
uint16_t TIM_OutputNState; //高級定時器輸出比較N狀態
uint16_t TIM_Pulse; //比較值(圖9 CCRx)
uint16_t TIM_OCPolarity; //輸出比較極性
uint16_t TIM_OCNPolarity; //高級定時器輸出比較N極性
uint16_t TIM_OCIdleState; //設置高級定時器空閑狀態
uint16_t TIM_OCNIdleState; //設置高級定時器N空閑狀態
} TIM_OCInitTypeDef;
我們用到的是通用定時器所以不用看那些高級定時器才能用的參數,所以這里我們只要設置4個參數就可以了。首先第一個輸出模式。
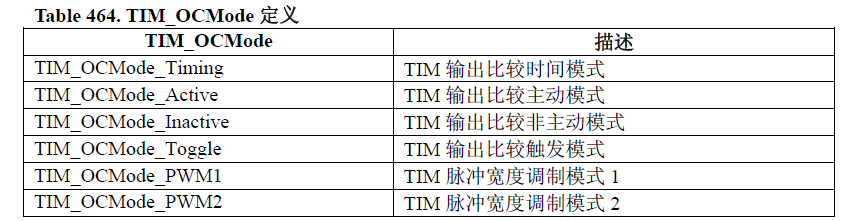
這里我們用到PWM模式1,PWM模式2上邊有講到,至于其他的模式在此不叫講述,可以自行百度。
TIM_OCMode= TIM_OCMode_PWM1;
第二個TIM_OutputState這個是使能位,我們選擇使能就好了
TIM_OutputState=TIM_OutputState_Enable;
第三個是輸出極性,也就是我們要的是高電平有效還是低電平有效,這個跟我們LED引腳連接相關,這里我們選擇高電平有效,LED的連接上我們將正極接到GPIO口上;
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High;
第四個是比較值,我們在后邊主函數會用另一個函數直接設置,這個數也就是我們圖9CCRx對應的那個值,也可以稱之為占空比,這里我們不用設置;
所以我們通道2初始化結構體的參數設置是:
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High;
TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable;
這里我們還需要通過void TIM_OC2PreloadConfig();(省略參數)這個函數來使能通道2上的預裝載寄存器
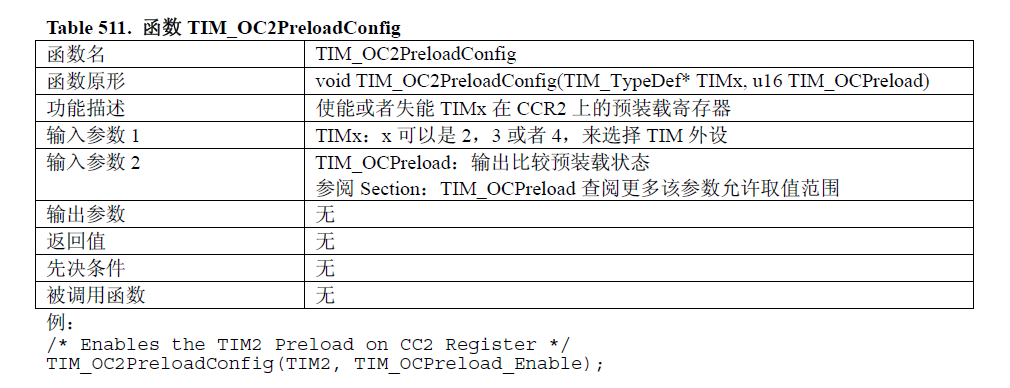
他有兩個參數,一個設置是哪個通用定時器,一個是使能,比較簡單,這里直接設置:
TIM_OC2PreloadConfig(TIM2,TIM_OCPreload_Enable);
那么我們通道2初始化步驟完整的代碼如下:
TIM_OCInitTypeDef TIM_OCInitStruct; //定義結構體變量
//TIM2通道2初始化 ③
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM1; //PWM模式1
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High; //高電平有效
TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable; //輸出比較使能
TIM_OC2Init(TIM2,&TIM_OCInitStruct);
//TIM2通道2預裝載寄存器使能
TIM_OC2PreloadConfig(TIM2,TIM_OCPreload_Enable);
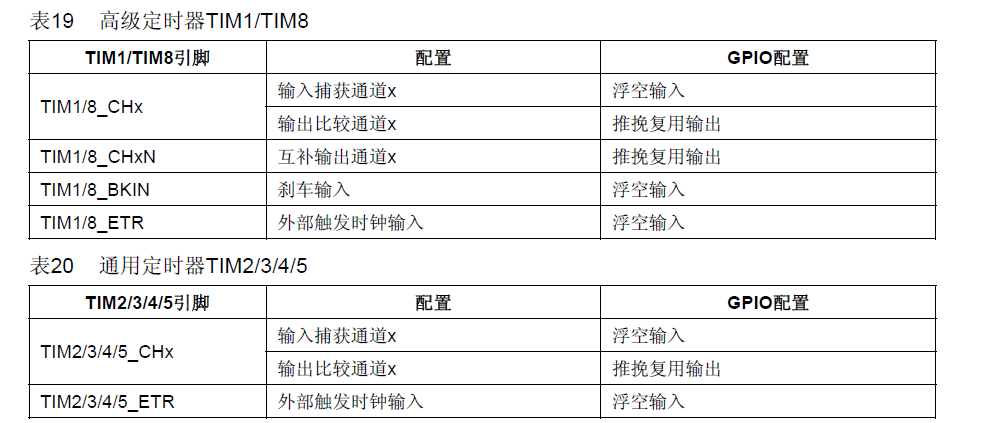
GPIO初始化,這里上一篇已經講過了,不過這里要注意的是我們使用的是復用推挽輸出模式,這個是有固定要求的,可以查閱《stm32中文參考手冊》
那么GPIO初始化代碼如下【補充:GPIO系列函數申明在文件stm32f10x_gpio.h中】:
GPIO_InitTypeDef GPIO_InitStruct;
//GPIO PA1初始化 ④
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP; //復用推挽輸出
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_1; //PA.1
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; //50MHz速度
GPIO_Init(GPIOA,&GPIO_InitStruct);
綜上,PWM.c文件中的PWM初始化函數就寫好了,我們接著寫主函數main.c,先看完整代碼:
#include "stm32f10x.h"
#include "delay.h"
#include "PWM.h"
int main(void)
{
int ledpwm=0; //定義占空比變量
TIM2_PWM_Init(899,0); //初始化PWM ARR=899;PSC=0
delay_init(); //初始化延時函數
while(1)
{
delay_ms(5); //穩定pwm波
for(ledpwm =0; ledpwm <=255; ledpwm ++) //從0到255一個個加
{
TIM_SetCompare2(TIM2, ledpwm); //設置TIM2_CH2占空比
delay_ms(10); //延時10ms
}
for(ledpwm =255; ledpwm >=0; ledpwm --) //從255到0,一個個減
{
TIM_SetCompare2(TIM2, ledpwm); //設置TIM2_CH2占空比
delay_ms(10); //延時10ms
}
}
}
導入PWM.h頭文件,然后初始化pwm,arr=899,psc=0;初始化延時函數,然后通過for循環從0到255計數,這個相信有點C語言基礎的都沒問題,然后是一個新函數,void TIM_SetCompare2();設置通道2捕獲比較寄存器的值。
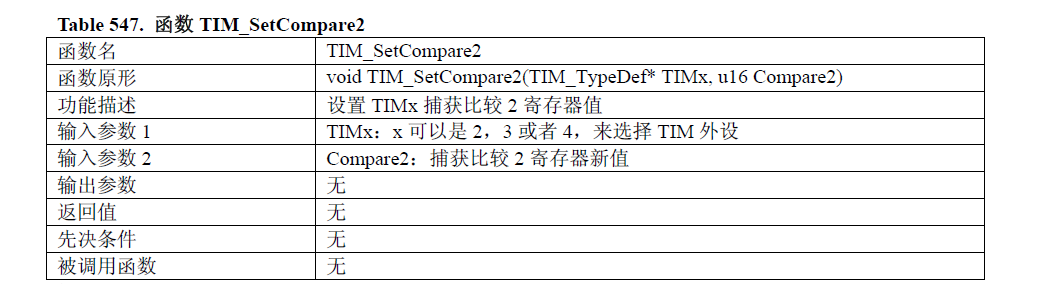
兩個參數,一個是哪個通用定時器,一個是比較寄存器的值,比較簡單,如下
TIM_SetCompare2(TIM2, ledpwm);
然后這里為什么是255呢,這個值是可以計算的,LED的最大亮度對應的電壓通過占空比計算出對應數值就好了,再大的數值對LED的亮度也就沒用了,亮度最大了,還可能燒壞LED。
Stm32的高電平 是5v 我們設置的ARR值是899,那么最大就是899,假設我們設置的比較值是450,那沒就是50%的輸出電平也就是2.5v,以此計算。
完整文件PWM.h PWM.c main.c就這三個文件要寫,寫好了編譯燒寫就可以了,在自己動手實操一遍后建議換一個定時器和通道再操作一遍,會更加熟練。
四,燒寫驗證
話不多說,上圖(家里沒示波器,我用軟件調試來查看輸出的波形)
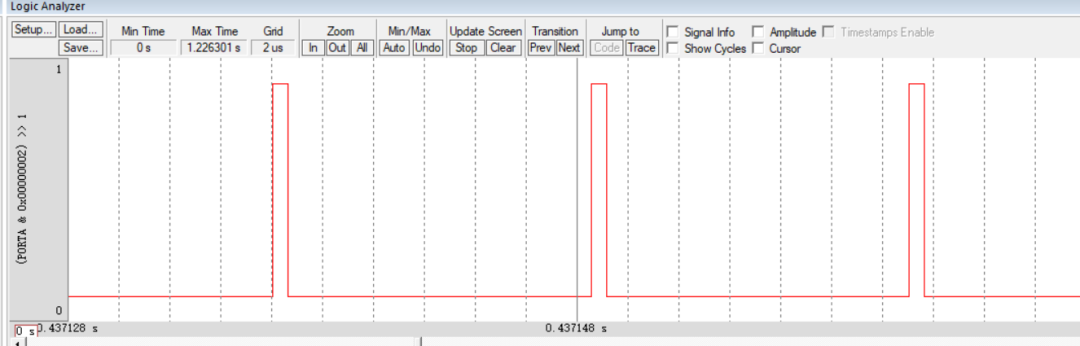
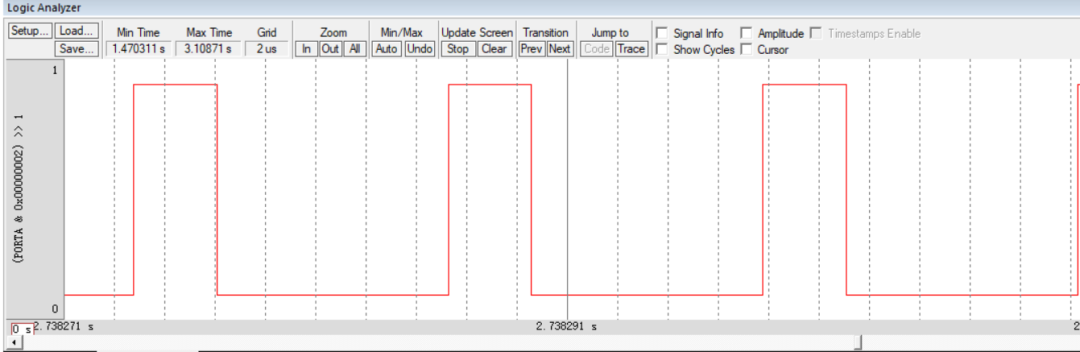
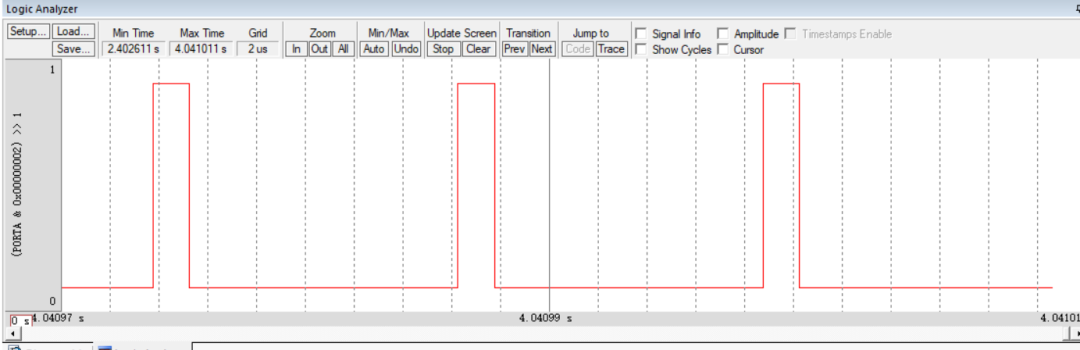
可以看到波形從小到大再到小(可以通過圖片下邊的時間結合波形寬度看出),再看看LED的變化:
可以看到LED漸漸從亮到暗再到亮,說明我們實驗結果完美達標。
-
電機控制
+關注
關注
3573文章
1969瀏覽量
272067 -
定時器
+關注
關注
23文章
3298瀏覽量
118985 -
PWM波
+關注
關注
0文章
100瀏覽量
17377 -
呼吸燈
+關注
關注
10文章
112瀏覽量
43235 -
STM32F103C8T6
+關注
關注
110文章
165瀏覽量
85892
發布評論請先 登錄

使用STM32F103RB單片機實現PWM呼吸燈實驗的資料免費下載
STM32_PWM呼吸燈

STM32G0開發筆記:用PWM來實現LED呼吸燈效果






 工商網監
工商網監
評論