 無需附加傳感器的升壓PFC變換器輸入功率估算可行性與準確性分析
無需附加傳感器的升壓PFC變換器輸入功率估算可行性與準確性分析

無需附加傳感器的升壓 PFC 變換器輸入功率估算可行性與準確性分析
概述
PFC 變換器廣泛應用于工業領域,它通過主線路提供直流輸出電壓,并同時保持高功率因數 (PF) 和低電流失真。其中部分應用,如電信、服務器、工作站電源和插電式電動汽車等,都需要實時測量有功輸入功率以監控能耗,并實現系統效率的提升與智能系統管理。通常情況下,在橋式整流器前面添加專用的電壓和電流傳感器可以實現這種功率計量功能。但是,無論附加的傳感器是基于分流還是基于霍爾效應,都會使電源成本、復雜性和功耗大幅增加。
根據升壓 PFC 變換器的基本建模[1],PFC 控制器通常會對輸入電壓、輸出電壓和電感電流進行采樣,以控制開關頻率和占空比。這樣,在輸出功率得到調節的同時整形輸入電流,從而實現高 PF 和低總諧波失真 (THD)。因此,PFC 控制器通常擁有可用于功率估算的原始信息。鑒于數字控制器已為業界廣泛采用[2、3、4],通過 PFC 控制器的數字通信接口通常可以實時訪問這些信息。這樣,我們就可以創建一種通過間接計算來監測輸入功率的方法,取代通過額外電壓和電流傳感器實現的傳統功率計量方法。
為了估算實際輸入功率并達到可接受的準確度,有幾個必須考量的關鍵因素。首先要考慮輸入端的無源元件,例如,電磁兼容 (EMC) 元件和橋式整流器會造成升壓變換器調節功率與實際輸入電流之間的差異。不過,這不是主要問題,因為無源元件引入的額外功率很容易建模[5]。換句話說,該功率可根據設計的電路參數直接計算出來,尤其是考慮到高頻失真并不是基本功率計量要求的主要關注點。然而,一些非理想效應卻會對電感電流估算的準確性產生較復雜的影響。例如,導通和關斷延遲會使實際電感電流和開關頻率偏離控制目標。DCM 中的寄生振蕩也會為電感電流引入了另一個變量。此外,這些影響還都隨工作條件而變化。大多數實際應用都采用多模式控制方案[6、6、7、8、9],因為其輕載性能優于傳統的臨界模式 (CrM) 控制方案或固定頻率連續導通模式 (CCM) 控制方案。為了準確估算功率,設計人員必須考慮各種操作條件下的這些非理想效應。由于 PFC 模型 [10] [10]具有可觀測性,即使不采樣電感電流[11、11、11、12],PFC 控制方案也能實現。因此,由延遲引入的電流誤差也可基于其他系統狀態和參數的適當建模而得到補償,例如輸入和輸出電壓,以及 PFC 電感。另一方面,DCM 中的寄生振蕩也可在時域中建模[13、14],這樣,每次開關產生的相應誤差都可以被推導出。
本文基于多模式 PFC 控制方案詳細分析了這些效應產生的影響,并提出了一種經過改良且易于實現的輸入功率估算法,以實現寬工作范圍內精確的有功功率估算 。我們采用數字 PFC 和 LLC 組合控制器 HR1211GY構建一個額定功率為 400W 的原型。該控制器采用多模式 PFC 控制方案,可實現 CCM 和 DCM 操作模式之間的平滑轉換。通過這種業界主流控制方案的實驗結果,可以驗證該估算方法的可行性和普遍適用性。
多模式PFC控制方案
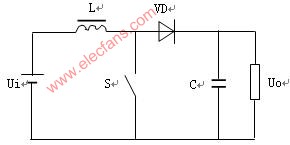
如圖 1 所示,采用典型多模式 PFC 控制方案的升壓變換器可實現 CCM 和 DCM模式之間的平滑轉換,從而實現寬工作范圍內的高效率。CCM模式可以最大限度地降低重載條件下的峰值電流和 RMS 電流,這有助于減小磁性元件的尺寸,使其適用于要求良好效率的大功率應用。具有較低開關頻率的 DCM 模式則可以最大限度地降低開關損耗,從而實現輕載條件下的高功率。而在中等負載條件下的CCM 和 DCM 混合模式則可以更好地在傳導損耗和開關損耗之間取得平衡,實現更佳的平均效率。這種新興的混合模式控制方案近來在業界得到認可,因為滿載效率和輕載效率對大多數實際應用來說都同樣重要。
如圖 1 所示,這種控制方案對輸出電壓 VO 進行采樣,并將其與輸出參考電壓 VOREF( OREF) 進行比較,以通過 PI 環路調節器得出內部補償狀態 v競爭和競爭(n) 。相應地,內部電流環路也為電感電流控制生成參考,公式如下:
其中, vIN(n) 是采樣的瞬時輸入電壓,而 VIN-PK 印尼語 是線路周期中的峰值電壓。
該方案在每個開關周期內 ,在MOSFET 關斷之前采樣電感峰值電流iPK(n),并將 2iREF(n) 與iPK(n)進行比較,由此確定變換器應該工作于 CCM模式還是 DCM 模式。如果工作于 CCM 模式,則開關頻率 fS 被調節為最大開關頻率fS_MAX ,并作為穩態頻率。為保持每個開關周期的平均電流等于 iREF(n),每當電感電流 iL 下降到目標谷值i有效時,MOSFET即導通。公式如下:
與此同時,為保證 PFC 電感的勵磁平衡,控制導通時間 TON(n) 為:
如果工作于 DCM模式,仍以相同方式控制導通時間,但降低開關頻率以保持平均電流等于 iREF(n)。通常,開關頻率被控制為:
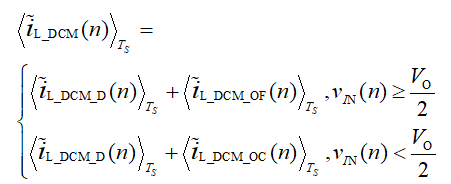
這樣,在一個開關周期內的平均 iL 始終等于 iREF。理想情況下, iREF 可用于計算輸入功率。但是,如果不對非理想效應進行補償,仍將無法保證估算的準確度,以下章節將對此進行詳述。
寄生效應引起的電流控制誤差
在升壓變換器中,導致實際電流與控制目標之間誤差的主要寄生效應來自開關延遲和電流振蕩。這些效應與變換器的參數有關,并隨工作條件而變化。
在 CCM 模式中,誤差主要由導通延遲 T噸 噸 噸 和關斷延遲 TD_ offFF引入,如圖 2 所示。導通延遲將導致低于目標電流谷值的下沖,而關斷延遲則使采樣點偏離電感電流的實際峰值點。一個開關周期內的平均誤差計算公式如下:
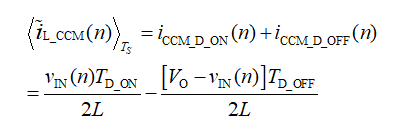
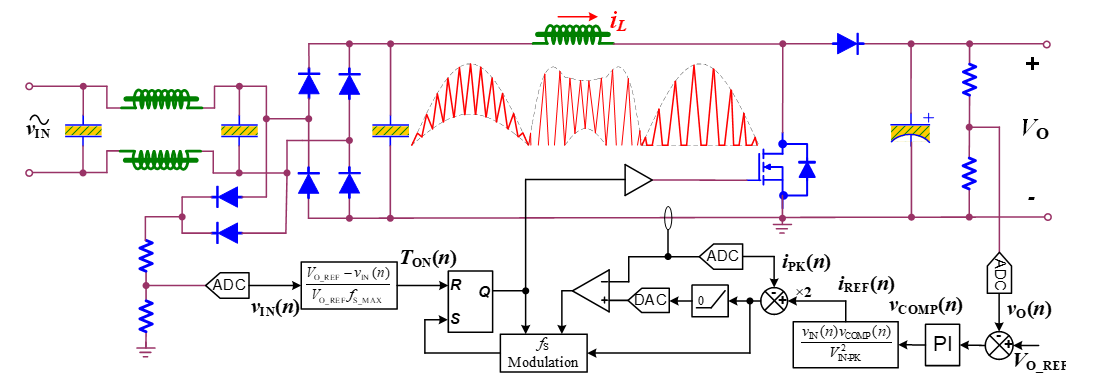
圖 1:采用多模式 PFC 控制方案的升壓變換器
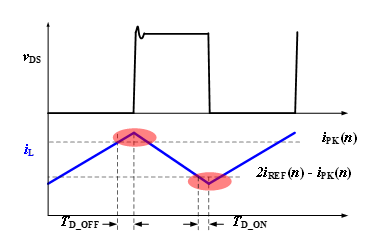
圖 2:CCM 模式中導致電流誤差的主要原因
其中, L 為 PFC 電感感量。
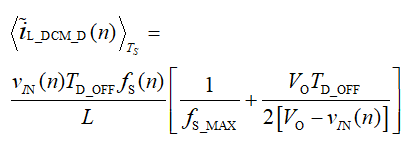
在 DCM 模式中,電感電流總是從零開始,因此導通延遲不會影響電感電流,如圖 3 所示。然而,關斷延遲對電感電流的峰值采樣仍有類似的影響。但其誤差模型與 CCM 不同,因為它對電流峰值和占空比均有影響。在一個開關周期內,由 DCM 關斷延遲引起的的平均誤差可以表示為:
另外,DCM 振蕩也是電流誤差的另一個主要原因。當 PFC 電感電流降至零時,電感隨 MOSFET 和續流二極管的等效寄生電容而振蕩。振蕩的初始狀態伴隨零電感電流和VO 處的漏源電壓 vDS 。由于 MOSFET 體二極管的鉗位效應,振蕩有兩種可能的情況,具體取決于 vDS 是否振蕩為零。
如圖 3(a)所示,當 vIN 超過 VO / 2 時,振蕩以自由阻尼方式進行,不會被鉗位至任何一點。一個開關周期內的平均振蕩電流可表示為:
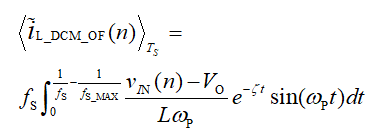
其中, ωP 和 ζ 是角頻率和振蕩的阻尼系數。
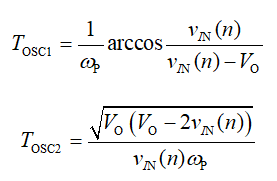
如圖 3(b)所示,當 vIN 低于 VO / 2時,當 vDS 降至零時,振蕩被體二極管鉗位。鉗位期間,電感電流以恒定斜率上升,直到電流極性再次反轉。然后,恢復自由振蕩。本場景中的振蕩由三個部分組成,前兩個部分的持續時間可分別計算如下:
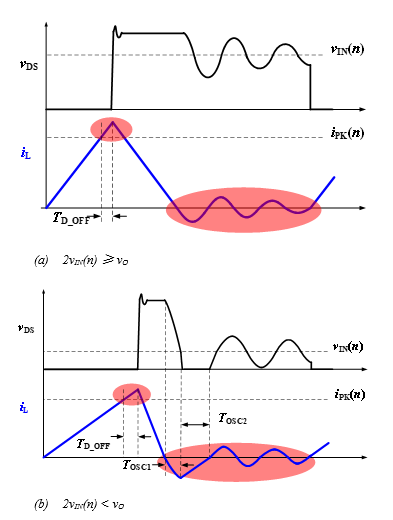
圖 3:DCM 模式中導致電流誤差的主要原因
由此可以得到一個開關周期內的平均振蕩電流,公式如下:
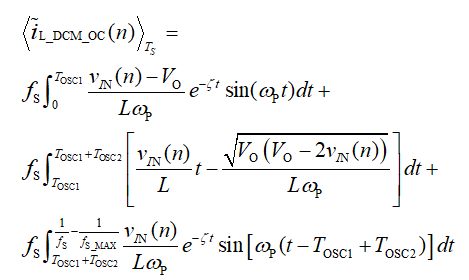
基于此,DCM 中的一般電流誤差為:
在每種操作模式下,由寄生效應引起的電流誤差通過 公式 (5) 至公式 (11) 計算。但是,如果要在實際應用中采用一個通用的電流誤差補償算法,還需要考慮各種條件之間的邊界情況。假設在 AC 輸入線周期的第一個1/4周期內,CCM 和 DCM 之間的轉換角為 θT,則邊界導通處的輸入電壓和參考電流為:
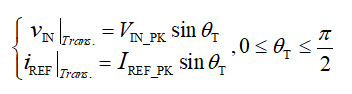
其中 IREF_PK 是一個完整線路周期中的峰值參考電流,可根據公式 (1) 通過v競爭和競爭 推導。交流輸入線每1/4周期中的轉換角都彼此對稱。
由于電感電流在轉換點也處于邊界傳導狀態,因此有下式:
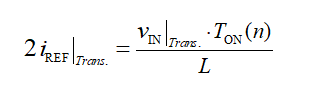
根據公式 (2)、(12)、(13),可以推導出
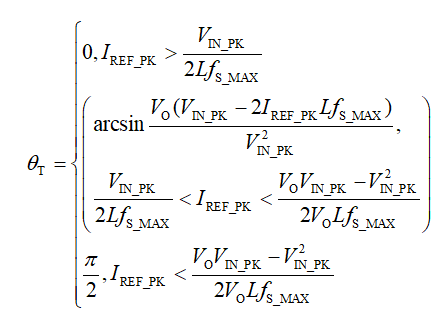
相應的 θT 分布如圖 4 所示。當 θT 為 0 時,變換器僅在 CCM 模式下工作。當 θT 等于 π / 2時,變換器僅在 DCM模式下工作;當 θT在 0 和 π / 2之間時,變換器在一個 AC 輸入線周期內同時工作于CCM 和 DCM 模式,而且隨著負載增加或輸入電壓降低,工作于CCM 模式的時間會增加。
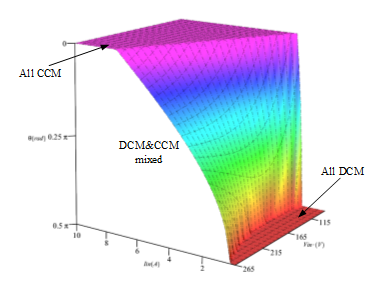
圖 4:CCM 和 DCM 工作模式分布 vs. 輸入和負載條件
有功輸入功率估算
有功輸入電流可以通過補償各種工作條件下的寄生效應來精確估算,如第3部分中的分析所示。為了獲得有功輸入功率,還需要考慮輸入端無源元件引入的功率損耗。
以圖1所示的原理圖為例,PFC變換器輸入端的無源元件主要包括LC濾波器和橋式二極管。流過濾波器電容的無功電流對有功功率沒有貢獻,而且電容的漏電流足夠小,因此,濾波器電容對有功功率的估算影響不大。但橋式二極管引入的壓降和濾波器電感的寄生電阻則會帶來相當大的功率損耗,必須將其納入功率估算之中。無源元件之前的輸入電壓可通過下面的公式推導:

其中, V發 發 發 發 發 是橋式整流二極管的正向電壓, RL 是所有濾波器電感的總等效電阻, vIN(t) = VIN-PK 印尼語sinωLt 是 PFC 控制方案中基于采樣輸入電壓 vIN(n) 的重構電壓, ωL 則為輸入線頻率。
綜合以上所有的分析,有功輸入功率可通過以下公式估算:
實驗驗證
為了驗證對輸入功率的分析和提出的估算方法是否準確,我們構建并測試一個 400W 的原型。該原型采用數字多模式 PFC 和 LLC 組合控制器HR1211GY設計并實現。其PFC 級的電路和控制方案與圖 1 相同,原型照片如圖 5 所示。PFC 級的規格和關鍵元件參數包括 V內 文 號= 90V - 265V,fL= 50赫茲,RL=100立方米,V發 發 發 發 發= 0.75V,VO= 400V, = 400V,fS_MAX= 100kHz,L = 190μH, 原邊 MOSFET IPP60R099C7XKSA1、續流二極管STPSC406D 、 ωP= 5.93×106弧度/秒,T噸 噸 噸 = 300ns 和 TD_ offFF = 150ns。而功率估算所需的其他瞬時狀態,如 v競爭和競爭, VIN-PK 印尼語 和 VO,都可以通過 HR1211GY 的集成 UART 接口實時訪問。
輸入電流和 PFC 電感電流的波形如圖6所示。圖中顯示了 PFC變換器在低壓和滿載條件下完全運行于 CCM 模式。開關頻率固定為 fS_MAX,電流峰值和電流谷值均調節為正弦波。
圖 5:采用 HR1211GY 構建的 400W 實驗原型
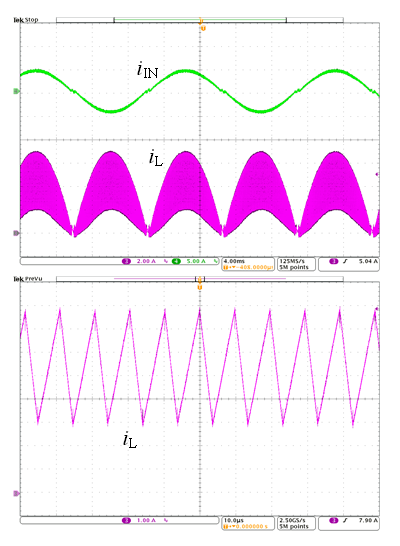
圖 6:實驗波形(VIN_rms = 110V 、PO = 400W)
在高壓線和滿載條件下,PFC 變換器工作于CCM 和 DCM 混合模式,如圖 7 所示。波形顯示出電感電流在 CCM 和 DCM 之間的轉換。峰值電感電流在輸入線的峰值處較低,但電感電流的開關周期平均值仍由控制器調節為正弦波。
在輕載條件下,PFC 變換器完全工作在 DCM模式,如圖 8 所示。開關頻率隨負載的下降而降低。
采用本文提出的功率估算方法,根據上述原型的參數和從數字控制器 HR1211GY 中讀取的瞬時狀態,可以計算出從 10%到100% 負載條件下的輸入功率。圖 9 對計算結果和使用WT310E功率計得到的實際測量結果進行了對比。
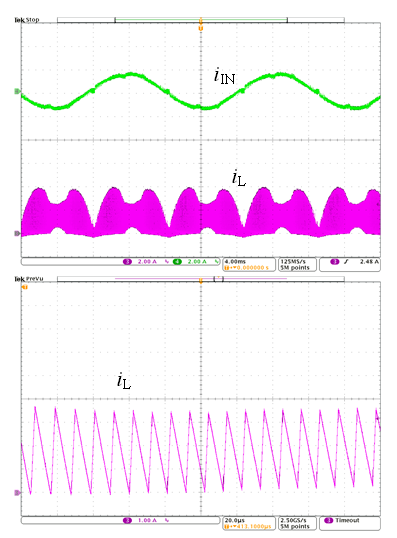
圖 7:實驗波形(VIN_rms = 230V 、 PO = 400W)
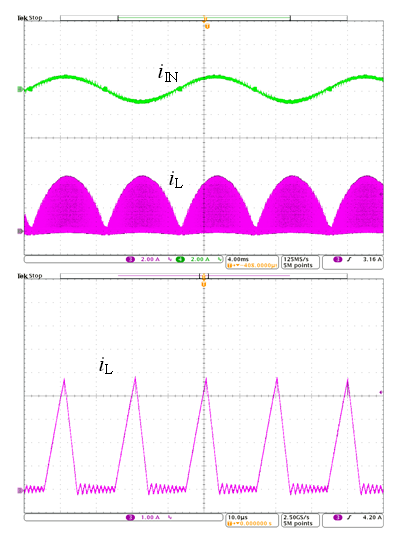
圖 8:實驗波形( VIN_rms = 110V 、PO = 100W)
可以看出,在寬負載范圍內的估算誤差小于 3%。而且,相同的估算法可覆蓋各種不同的輸入條件。
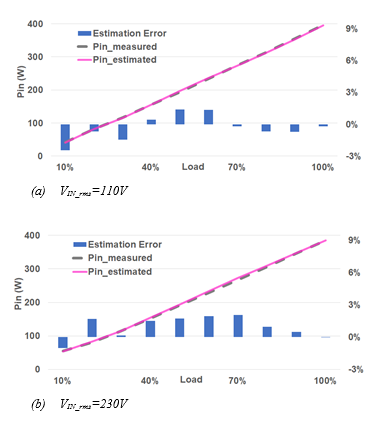
圖 9:計算輸入功率與測量輸入功率的對比
結語
本文探討了在沒有任何附加傳感器的情況下,對升壓 PFC 變換器的有功輸入功率進行估算的可行性。分析考慮了各種寄生效應的影響,例如導通和關斷延遲、DCM 振蕩、DCM 和 CCM 之間的轉換以及無源元件的有功功耗。根據系統和寄生效應的數學建模,我們提出了一種準確估計輸入功率的算法。它考慮了主流多模式PFC控制方案的特點,能夠支持寬工作范圍。通過基于 HR1211GY構建的 400W 升壓 PFC 原型的實驗結果,該估算法已得到驗證。數字 PFC 控制器在實際應用中越來越常見,本文提出的功率估算法可降低系統復雜性與成本,同時在不添加任何額外傳感器的情況下實現基本功率計量功能,助力提升未來電源產品的可靠性。
審核編輯:湯梓紅
-
傳感器
+關注
關注
2566文章
53008瀏覽量
767649 -
變換器
+關注
關注
17文章
2142瀏覽量
110827 -
功率因數
+關注
關注
10文章
603瀏覽量
40339 -
PFC
+關注
關注
47文章
1021瀏覽量
108270
發布評論請先 登錄
非線性損耗模型:提升SiC變換器性能估算的準確性
路面檢測方案比較及可行性分析
氣體傳感器研發的可行性報告
關于PFC實驗裝置負載測量準確性的問題
flightsense傳感器的準確性怎么樣?
升壓變換器,升壓變換器輸入輸出電壓關系及Boost電路拓補結


基于傳感器準確性的醫療應用





 工商網監
工商網監
評論