 智能混合動力系統仿真測試平臺開發
智能混合動力系統仿真測試平臺開發

硬件在環測試與實車測試是用來驗證和優化自動駕駛感知、控制算法的主要技術。自動駕駛汽車引入了大量新技術,在這些技術完全成熟之前需要進行大量測試對自動駕駛算法進行預先評估。傳統的實車測試是一種費時費力且成本高的測試方法,且只能進行有限數量的場景測試。相比之下,硬件在環測試可以使用和實際車輛高度一致的仿真傳感器、車輛模型和豐富的交通場景,為自動駕駛算法提供了一種經濟效益和測試效果更加均衡的測試條件。因此,硬件在環測試逐漸成為了自動駕駛汽車研發的強制性步驟。
本自動駕駛仿真測試平臺搭載駕駛模擬器、自動駕駛與整車控制器、傳感器與整車動力系統等硬件設備,以及遠程通信設備接口,為后續實車實景測試、遠程遙控駕駛、云控駕駛、數字孿生等功能的實現奠定了基礎。本平臺的虛擬模型構建主要通過Prescan&Matlab聯合仿真實現。平臺整體架構可劃分七個部分,包括駕駛場景構建、車輛模型構建、傳感器與紅綠燈仿真、環境/仿真通信接口、控制器快速開發、以及駕駛模擬器等模塊。
// 駕駛場景構建 //
駕駛場景可分為靜態駕駛場景與動態駕駛場景。其中,靜態駕駛場景可通過以下三種方式實現:1.根據實驗需求,直接拖動Prescan道路模塊構建理想狀態下的靜態駕駛場景;2.導入現有地圖數據,生成普適性駕駛場景;3.根據自車運行軌跡構建個性化駕駛場景。動態駕駛場景構建則通過Prescan&Matlab聯合仿真生成高逼真的虛擬交通參與者和行為風格、天氣變化等。

圖1卓越工程師學院仿真場景(大曲率彎道和大坡度環境)

圖2大學城周邊仿真場景(城市環境)
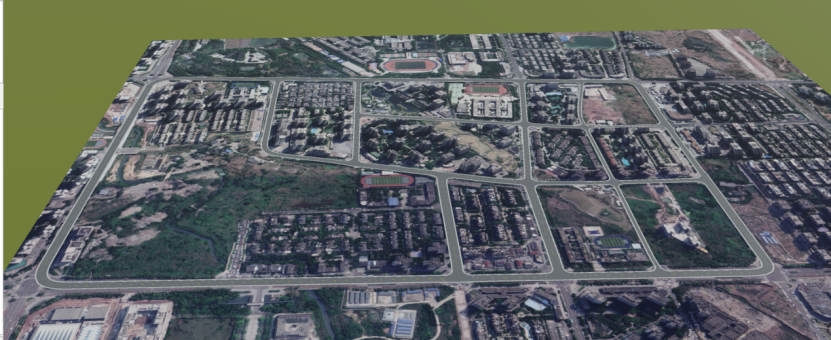
圖3重慶大學虎溪校區周邊仿真場景(城市環境)
在人機駕駛混合交通環境下,人機相互作用關系、交通流呈現的狀態,以及交通控制技術的適應性等現實問題是亟需探討、研究的。因此,本平臺還支持交通流仿真,可研究交通干擾信息對本車駕駛行為的影響,以及協同式駕駛策略。所搭建的交通流仿真場景如下視頻所示。
// 車輛模型構建 //
車輛模型是自動駕駛算法測試的重要基礎,主要包含車輛動力學模型、動力系統模型、動力電池及電池管理模型、車載空調及熱管理模型等多個系統。將這些被控對象模型參數化后,即可將真實的駕駛控制、能量管理、熱管理等系統集成到仿真平臺中進行測試。
其中,能量管理策略模塊、換擋策略模塊涉及到動力系統的控制策略,需要單獨考慮,由核心層的控制邏輯部分來設計完成。而動力傳動系統,加上電機、發動機、電池等動力源在內,模型采用模塊化的建模方法,按照動力或者能量傳遞環節,將其劃分為各個相對獨立的子模塊。根據每個環節的物理過程(如動力傳遞過程、能量轉換過程),建立子模塊的模型,再由這些子模塊有機連接形成一個完整的模型,如圖4所示。
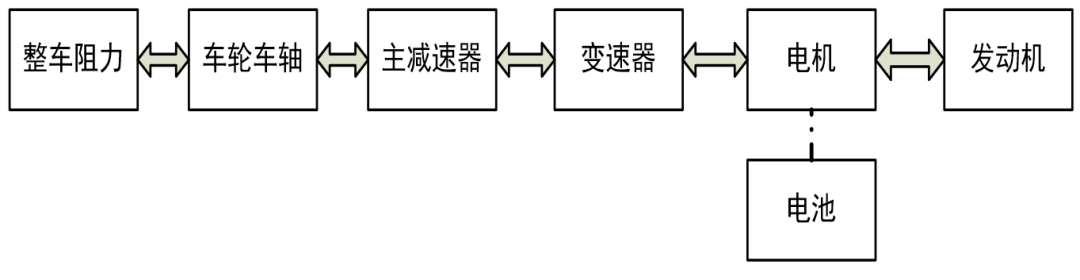
圖4子模塊連接示意圖
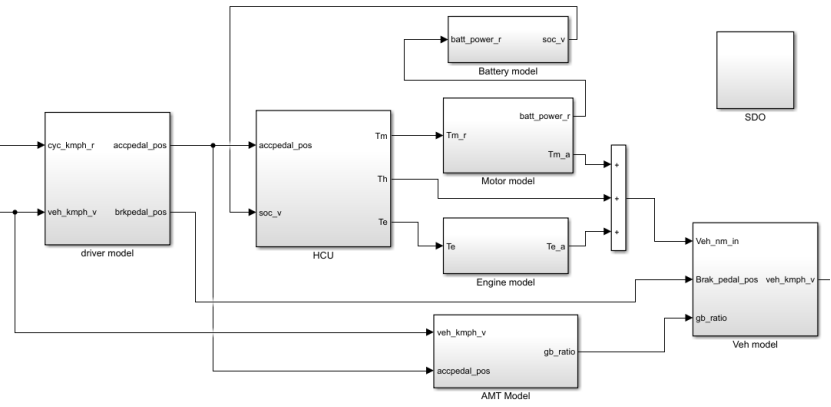
圖5系統閉環仿真模型
— —車輛動力學模型
在自動駕駛與動力系統控制中,車輛模型的建立和分析是進行控制器設計的基礎。
(1)車輛縱向行駛方程如下:

其中,

為滾動阻力,
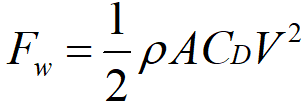
為空氣阻力,
為坡度阻力,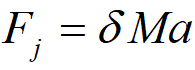 加速阻力。式中,M為汽車質量,
加速阻力。式中,M為汽車質量, 為坡度,
為坡度, 為旋轉質量系數;f為滾動阻力系數,A為汽車迎風面積,
為旋轉質量系數;f為滾動阻力系數,A為汽車迎風面積, 空氣阻力系數,
空氣阻力系數, 為空氣密度。
為空氣密度。
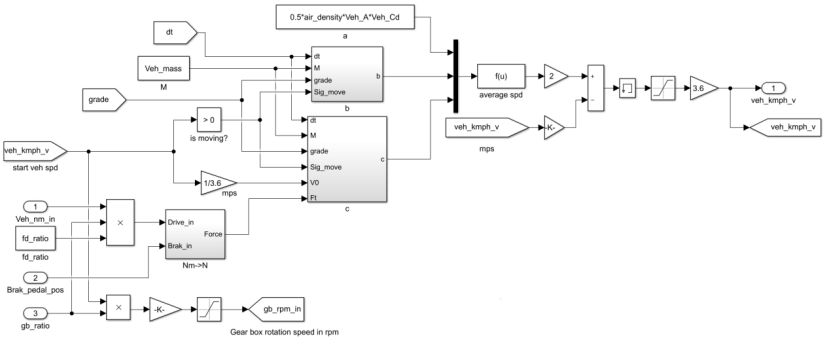
圖6車輛縱向運動仿真模型
(2)車輛橫向采用二自由度動力學模型,具體可參閱公眾號相關文章(車輛二自由度動力學模型建模及其離散化應用),在此就不再贅述。
圖7車輛動力學仿真模型
(3)輪胎模型
在進行車輛動力學仿真時,輪胎所受的垂直力、縱向力、側向力和回正力矩對汽車的平順性、操縱穩定性和安全性起著重要作用。由于輪胎結構復雜,動力學性能呈非線性,選擇符合實際又便于使用的輪胎模型是建立車輛模型并進行動力學仿真的關鍵。主要的輪胎模型可以分為理論輪胎模型、經驗輪胎模型和物理輪胎模型等。
其中,Pacejka提出的以魔術公式( Magic Formula,MF)為基礎的經驗輪胎模型,運用三角函數的組合公式擬合輪胎試驗數據,描述輪胎的縱向力F1、側向力Fe、回正力矩Mz、翻轉力矩Mx、阻力矩My與側偏角α、滑移率s之間的定量關系,以及縱向力、側向力的聯合作用工況,能夠表達不同驅動情況時的輪胎特性。魔術公式的一般表達式為:

式中,系數B、C、D依次由輪胎的垂直載荷和外傾角確定,B為剛度因子,C為形狀因子,D為峰值因子,E為曲率因子。Y為輸出變量,可以是縱向力F1、側向力Fe、回正力矩Mz。x為輸入變量,在不同的情況下分別表示輪胎的側偏角α或縱向滑移率s。
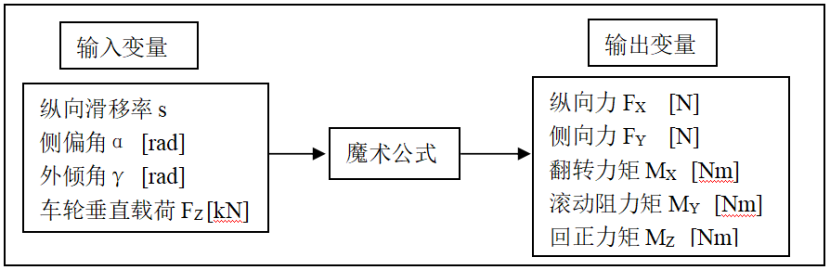
圖8 基于魔術公式的輪胎模型
在側偏角及縱向滑移率較小時,輪胎力可以用線性函數近似描述。這在側向加速度ay?0.4g的情況下對常規輪胎具有較高的擬合精度。在這個線性區內,可用以下算式得到輪胎的縱向力和側向力:

式中,Cl為輪胎縱向剛度,Ce為輪胎側偏剛度。
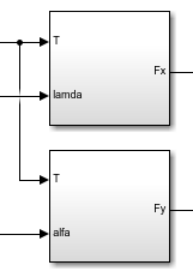
圖9輪胎仿真模型
——變速器模型
主減速器傳遞著車輪/車軸和變速器之間的功率,在傳遞的過程由于摩擦的存在,有一定的機械效率,從而造成一定的功率損失。主減速器模塊的框圖如圖10所示。
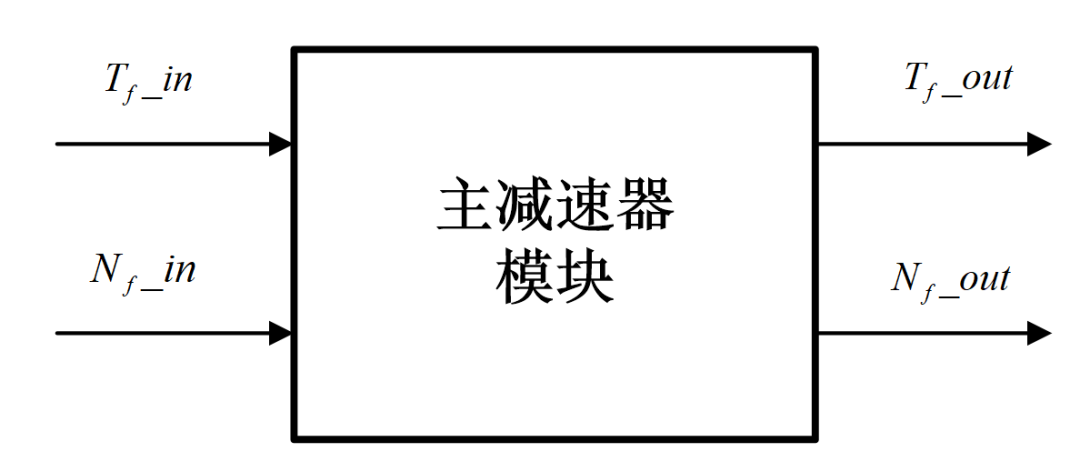
圖10主減速器模塊框圖
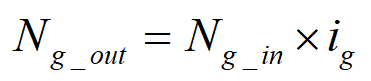
主減速器模塊的輸入轉矩轉速為通過車輪車軸模塊計算得到請求轉矩轉速,輸出為主減速器需要從變速器得到的轉矩轉速。首先根據傳動比計算轉速,公式如下:
然后根據主減速器的效率,計算輸出的轉矩,公式如下:
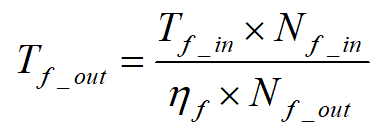
變速器在混合動力系統中要完成的任務是根據汽車行駛的需要,以不同的速比改變發動機到車輪上的扭矩和轉速,使其滿足汽車行駛的動力要求,并調節發動機的工作點。變速器模塊框圖如圖11所示。
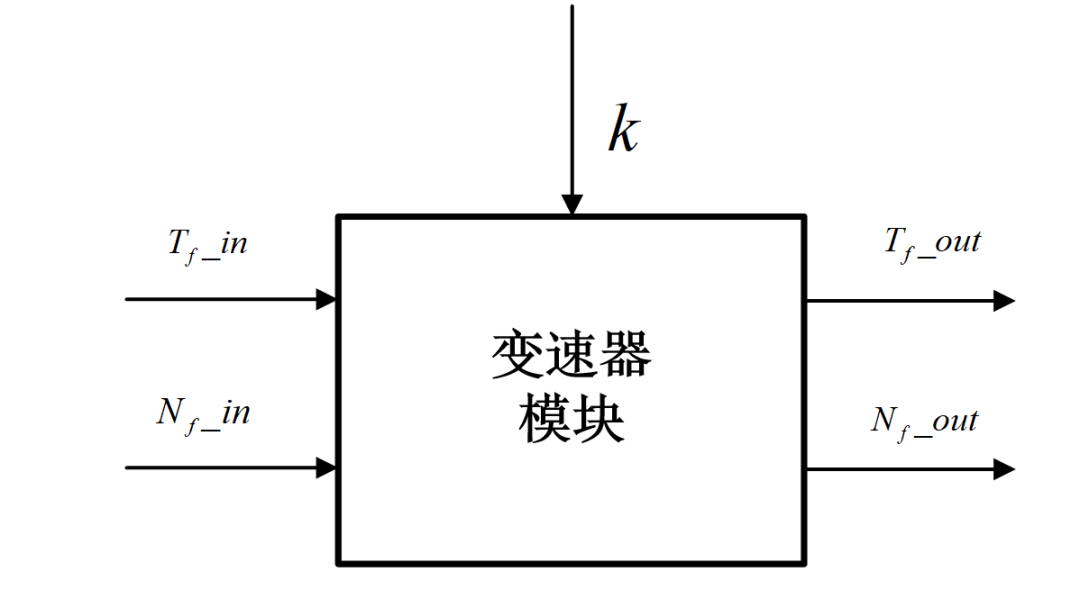
圖11變速器模塊框圖
其中k為變速器的擋位信息,包括變速器各擋的傳動比和機械效率等,由換擋策略決定。通過主減速器模塊計算得到的轉速和轉矩請求輸入至變速器模塊,變速器模塊根據轉速請求計算其輸出轉速即從動力總成得到的轉速,公式如下:
其中 為變速器在該擋位的機械效率
為變速器在該擋位的機械效率
然后根據該擋位的效率,計算輸出的轉矩,在驅動工況下,輸出的轉矩計算公式為:
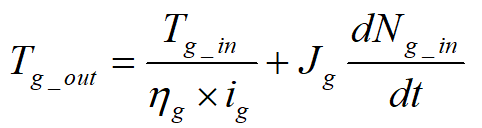
在制動工況下,輸出的轉矩公式為:
其中 為變速器在該擋位的機械效率,
為變速器在該擋位的機械效率, 為變速器的轉動慣量。
為變速器的轉動慣量。
——發動機與電機模型
發動機總成模塊包括離合器模塊、附件模塊和發動機模塊。其中離合器模塊傳遞扭矩的特性與動力總成控制邏輯的設定有關;附件模塊取決于附件功率損耗的形式,一種是恒定功率的附件功率損耗,這種情況通常發生在車載電子設備消耗發動機功率的情形,如空調壓縮機,另一種是功率損耗隨發動機轉速上升而上升的情形;發動機模塊指的是通常意義下的發動機系統。
發動機無疑是個復雜的系統,建立完整體現發動機原理的數學模型是非常困難的。對于整車能耗和排放而言,發動機主要性能體現在其穩態MAP圖中,因此發動機模塊采用穩態MAP圖為核心,反映其穩態特性,并加入一定的動態延遲環節,反映發動機的動態響應特性。
仿真模型中,發動機模塊接收來自上一級模塊輸出端提出的轉矩和轉速請求,并在其扭矩輸出特性圖中插值尋找滿足這一動態需求的工作點,通過插值計算此時的發動機油耗和排放。模塊框圖如圖12所示。
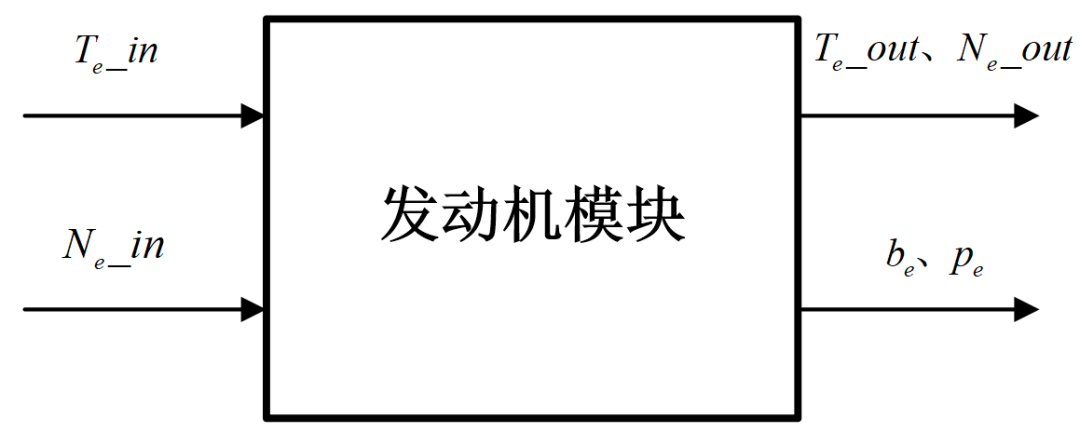
圖12發動機總成模塊框圖
其中, 分別代表發動機的燃油消耗率和排放。另一方面,發動機模塊中還需要建立相應的熱模型,來評估工作過程中發動機的溫度變化。 電機是一種雙向能量轉換裝置,它能工作為電動機模式將電能轉換為機械能,也能工作為發電機模式將機械能轉換為電能,從而為電池充電。電機模塊的功能為接受上一級模塊傳遞的轉速和轉矩請求,并在其扭矩輸出特性圖中插值尋找滿足這一動態需求的工作點,并根據效率計算電機的消耗的功率或者產生的功率。若是在電動機模式下,則
分別代表發動機的燃油消耗率和排放。另一方面,發動機模塊中還需要建立相應的熱模型,來評估工作過程中發動機的溫度變化。 電機是一種雙向能量轉換裝置,它能工作為電動機模式將電能轉換為機械能,也能工作為發電機模式將機械能轉換為電能,從而為電池充電。電機模塊的功能為接受上一級模塊傳遞的轉速和轉矩請求,并在其扭矩輸出特性圖中插值尋找滿足這一動態需求的工作點,并根據效率計算電機的消耗的功率或者產生的功率。若是在電動機模式下,則
若是在發電機模式下,則

電機的模塊框圖如圖13所示。
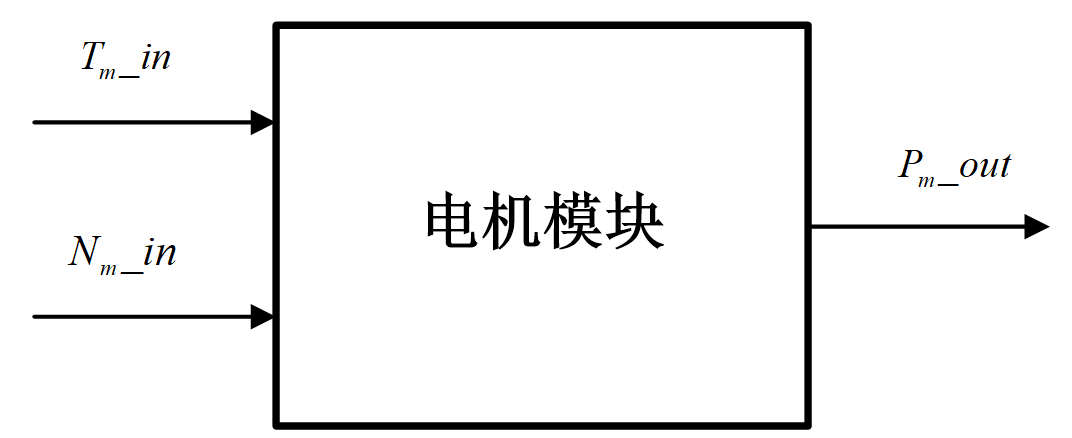
圖13電機模塊框圖
與發動機建模類似,電機模塊同樣基于電機特性圖。電機模塊中同樣需要建立相應的熱模型,來評估工作過程中電機的溫度變化。
——電池模型
電池是混合動力系統中的電能存儲裝置。電池模塊在仿真模型中接受由電機模塊傳輸過來的功率請求,然后返回一個電池組可以提供的實際功率值,并計算電池充放電過程中的內阻和庫侖效率導致的功率損失、電池電壓、電流和荷電狀態SOC。電池模塊框圖如圖14所示。
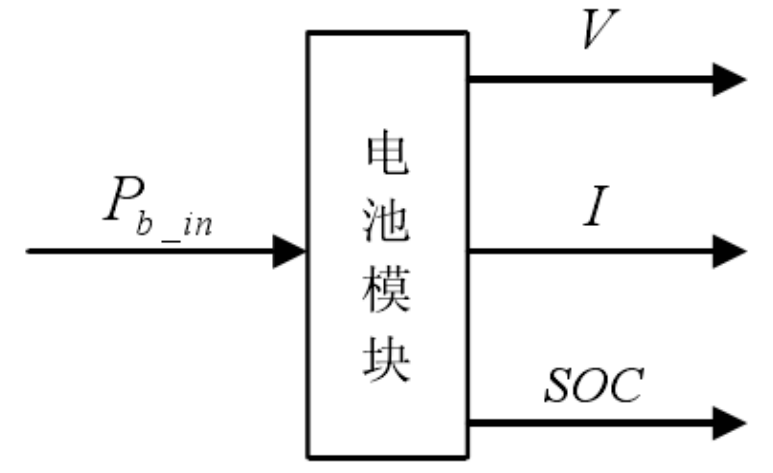
圖14電池池模塊框圖 電池中存在復雜的熱力電化學反應過程,因此建立精確地模型非常復雜,在此以最常用的內阻模型進行仿真。如圖15所示:
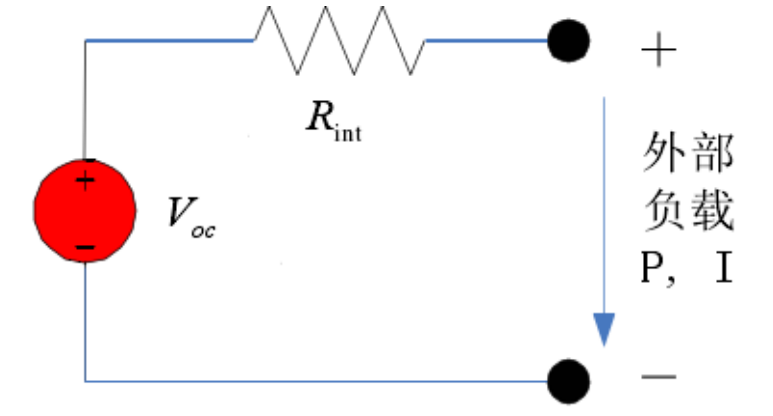
圖15電池內阻模型圖
蓄電池內阻模型的等效電路,由一個開路電壓和一個內阻串連而成。開路電壓和內阻均為SOC、溫度和充放電電流的函數。因此模型需要電池的開路電壓和內阻變化的相關特性曲線進行插值計算。
根據功率請求即外部負載功率,可以采用以下公式計算電流值:

根據電流值能夠計算電池的SOC,公式如下:
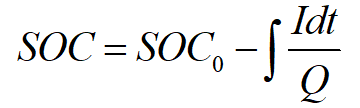
其中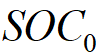 為初始SOC,Q為額定電量。
為初始SOC,Q為額定電量。
電池模塊中,由于開路電壓和電池充放電電阻和電池的溫度密切相關,因而相較于發動機、電機而言,電池的熱模型尤為重要。
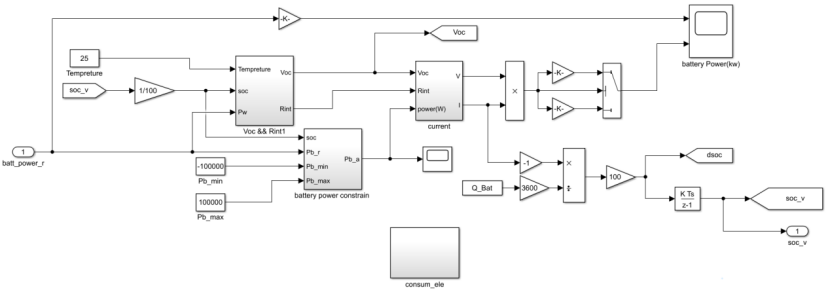
圖16電池仿真模型
// 傳感器仿真 //
傳感器仿真即在虛擬環境中對自動駕駛車輛的傳感系統進行重建,主要對象有攝像頭、Radar、LiDAR、GPS、IMU、超聲雷達等。本平臺借助建立的理想傳感器及誤差模型模擬傳感器在實際運行時的不確定狀態,使接收到的傳感器數據更接近真實狀態。
本文應用CAN通信功能模塊其目的主要是為了接收攝像頭的檢測數據以及車輛動力系統信息,然后利用所采集到信息,完成智能車在結構化道路上進行智能駕駛和動力系統控制算法的設計,并求解車輛行駛過程中所需的方向盤轉角、發動機扭矩、電機扭矩、變速箱檔位等控制指令,最后利用已開發CAN通信的發送功能,再回傳給駕駛模擬器來實現車輛的自主行駛控制,其傳感器在環測試子平臺如圖17所示。
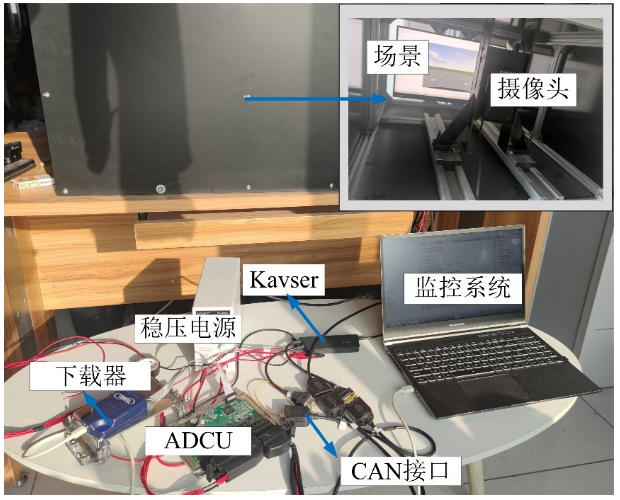
圖17 傳感器與控制器在環測試平臺
// 紅綠燈仿真 //
基于車聯網環境的智能紅綠燈控制實現車輛即時獲取紅綠燈狀態信息,并設計十字路口紅綠燈場景下車輛的行為決策和速度規劃控制算法,保證車輛通過十字路口時的安全性與通行效率。所搭建的仿真場景與紅綠燈硬件在環測試示意圖如下圖所示。
圖18智能網聯紅綠燈仿真場景
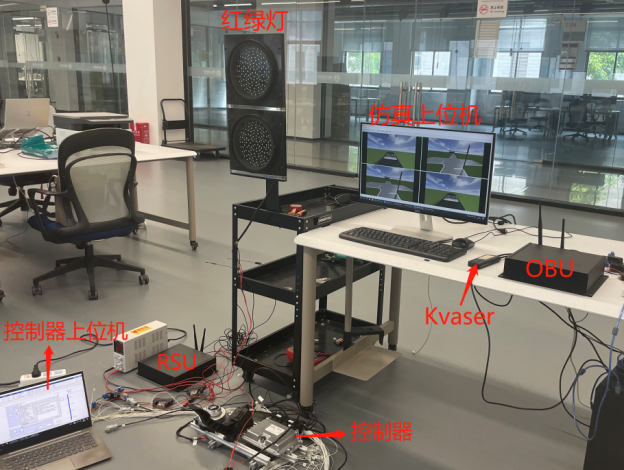
圖19紅綠燈硬件在環仿真測試
紅綠燈在環功能測試結果如下所示,子平臺詳細介紹可參閱公眾號文章(智能紅綠燈搭建和網聯環境下的交叉路口車輛速度規劃)。
(1)紅燈停車,綠燈行車(真實場景中的紅綠燈與仿真場景中的紅綠燈同步切換)
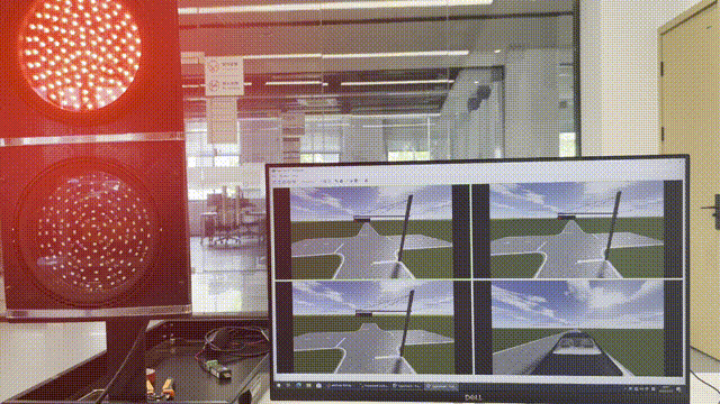
圖20 紅燈停車,綠燈行車
(2)長時綠燈加速通過(真實場景中的紅綠燈與仿真場景中的紅綠燈同步切換),可觀察車輛即將通過路口并加速時的俯仰運動。
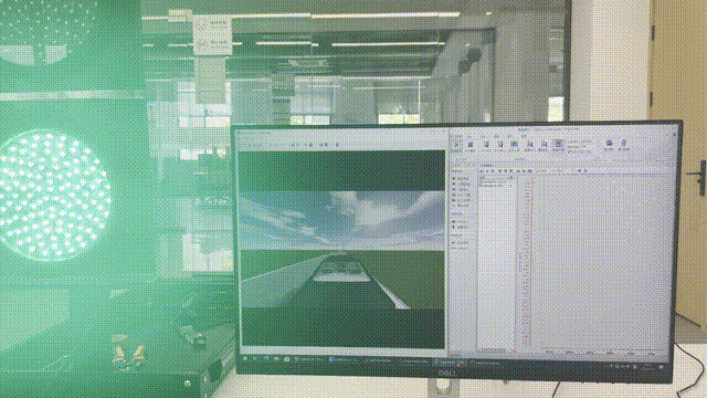
圖21 長時綠燈加速通過
(3)短時綠燈提前剎車(真實場景中的紅綠燈與仿真場景中的紅綠燈同步切換)
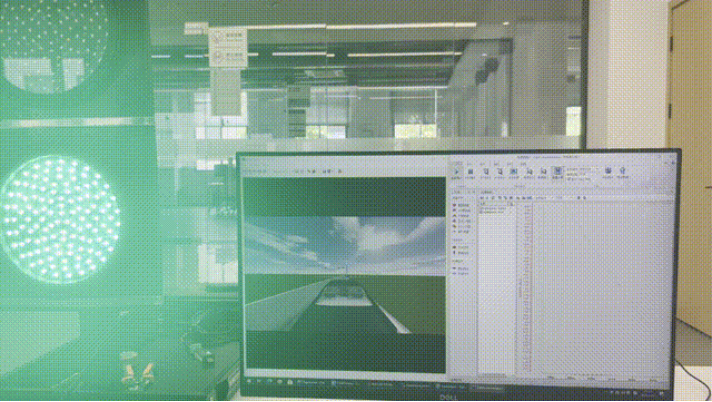
圖22 短時綠燈提前剎車
// 環境仿真通信接口 //
平臺內部各模塊間的通信主要以CAN通信為主,駕駛模擬器上的各類硬件開關或按鈕通過控制器采集信號后與平臺通信。GUI實時監控界面通信和實車數據遠程傳輸通過虛擬CAN模塊/真實CAN通信工具(OBU、Kvaser等)實現,駕駛模擬器數據輸入和算法輸入/輸出通過控制器或CAN數據解析模塊實現。此外,在平臺運行過程中,Simulink數據處理模塊將會在多個數據傳輸節點進行實時監控并對異常數據進行處理,提高算法穩定性及有效性。
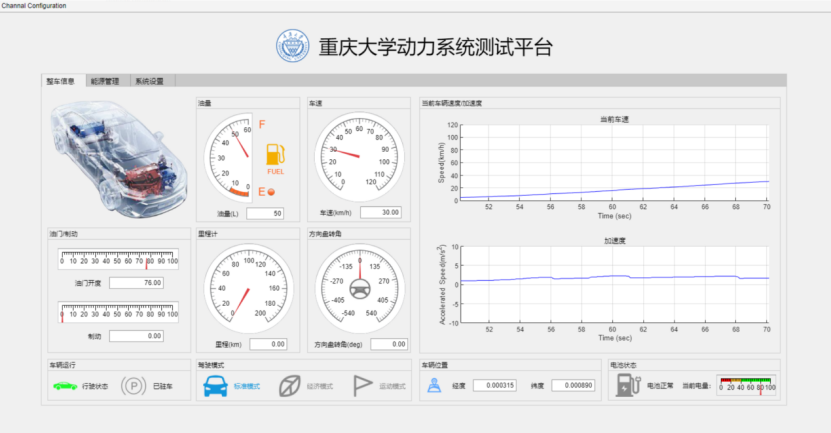
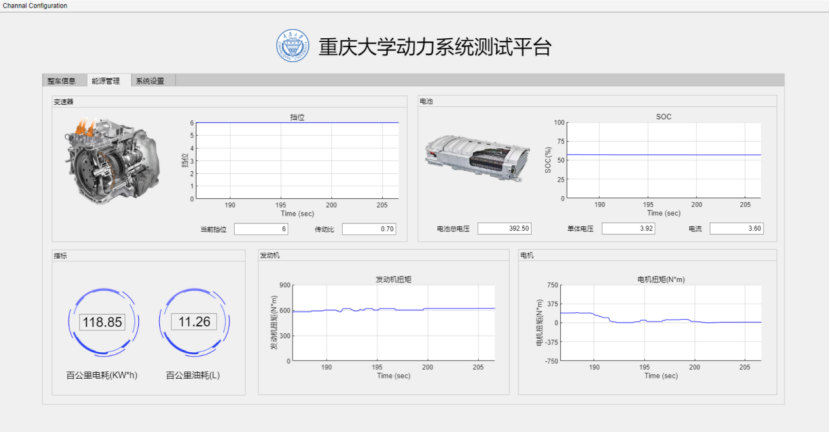
圖23 上位機監測界面
仿真測試過程視頻如下:
// 控制器快速開發驗證 //
控制算法嵌入模塊集成于Simulink內部并預留了車輛模型不同系統全部接口,開發者將相關算法與對應接口進行連接即可實現自動駕駛的多項功能,例如:動力模型構型優化及內部能量流展示分析與優化,電池狀態SOX聯合估計,電機、電池及空調多源協同熱管理控制,駕駛場景分析與交通流預測和車速規劃與能量管理協同優化等。此外,平臺內部已嵌入多種基礎算法,可保證開發者單獨測試某項自動駕駛功能的需求,也可以利用快速原型實現控制器在環測試。
——動力系統智能控制
該測試平臺是針對某插電式混合動力汽車搭建的,動力系統是發動機-電機混聯驅動構型,插電式混合動力整車控制器具有以下功能:
(1)具有整車轉矩管理、變速箱協調管理、發動機協調管理、電機電池協調管理、充電管理、故障診斷等功能;
(2)能夠對上/下電時的高/低壓控制邏輯進行管理,能夠根據駕駛員輸入對需求轉矩做出準確判斷,能夠對車輛當前工況進行判斷,能夠實現扭矩請求和扭矩限制功能;
(3)可以實現再生制動功能,并且協調制動能量回收過程電機制動與ABS系統,保證制動安全;
(4)同時整車控制可以控制附件,如電動助力轉向、空調、打氣泵等;
(5)故障診斷功能,能夠識別零部件及系統功能故障,并采取相應的應對策略,提供系統故障保護下的跛行功能;
具體的插電式混合動力汽車整車控制器功能示意圖如圖24所示,所搭建的動力系統智能控制策略如圖25所示。
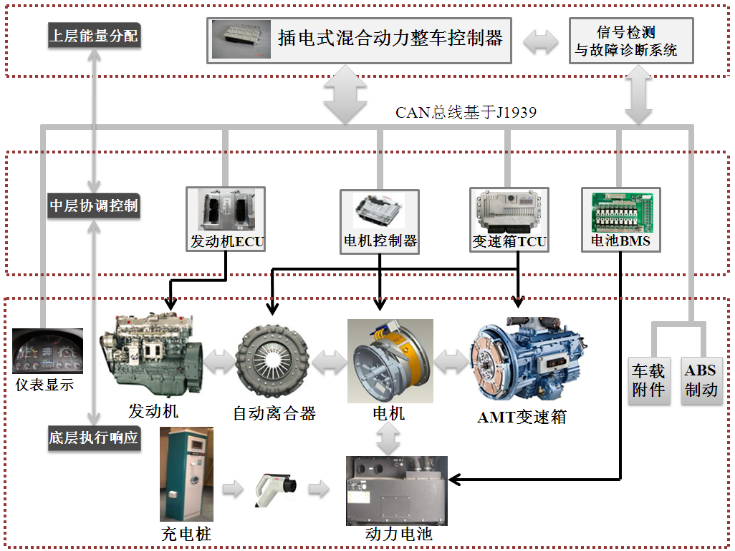
圖24整車控制器功能示意圖
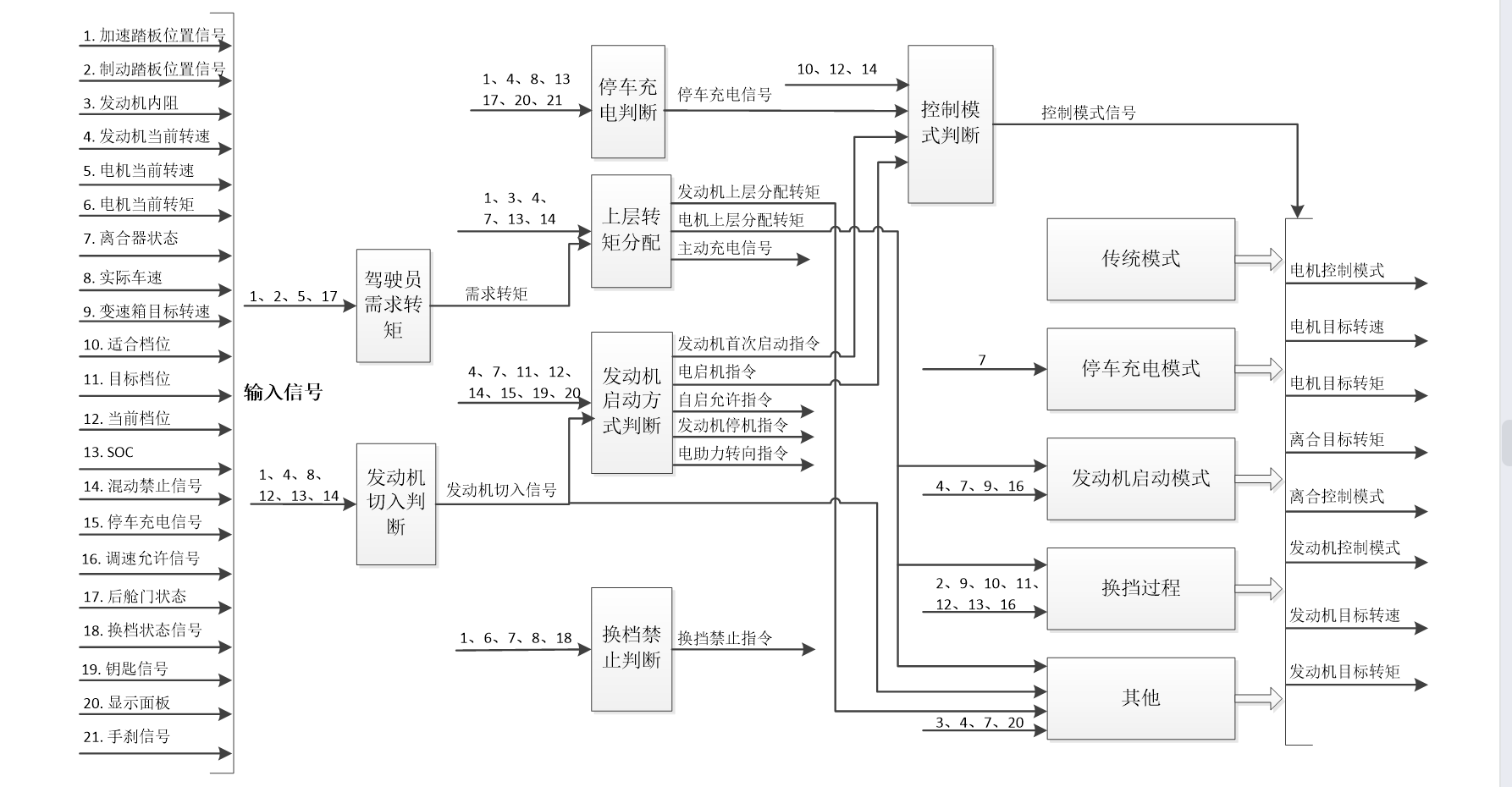
圖25動力系統智能控制策略示意圖
插電式混合動力汽車有發動機和電機兩個動力源,在實際運行過程中,燃油和電池組成的多能源系統需要整車控制器進行協調管理,在驅動過程中,在低速低扭矩請求下整車控制器控制電機輸出驅動扭矩,速度高于一定門限后整車控制器控制發動機輸出驅動扭矩,在發動機驅動過程中整車控制器會根據發動機工作點控制電機進行協調,進而進入混合驅動模式或者進行發動機主動充電模式。同樣在制動過程中,當駕駛員踩下制動踏板,整車控制器會根據駕駛員減速意圖計算需求的制動扭矩,并控制電機系統和氣壓制動系統進行協調控制,實現制動安全的同時保證制動能量回收最大化。整個控制邏輯實現了多能源系統的優化控制。
能量管理策略為整車控制器控制策略核心功能,控制器通過駕駛員駕駛意圖判別結合典型城市交通工況流量統計信息,得到對應的控制策略,針對不同的工況路況以及駕駛員油門踏板制動踏板的變化采用相對最優的控制策略,以獲得更高的燃油經濟性。具體示意圖如圖26所示。
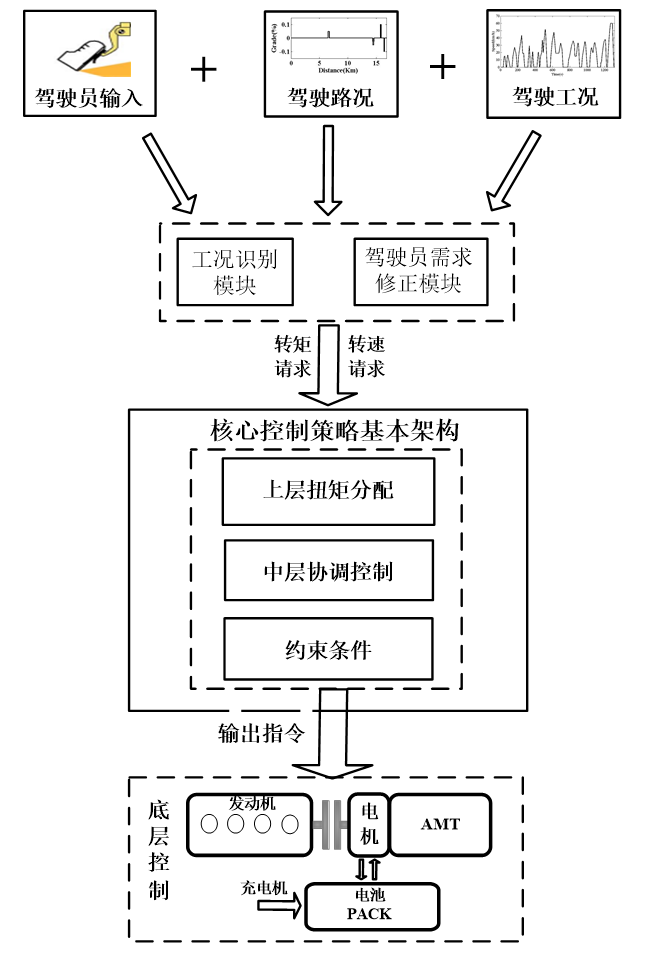
圖26 核心控制策略構架示意圖
——基于道路信息的瞬時能量優化控制
針對混合動力汽車能量分配策略效率低、適應性差、無實時調節性等缺點,設計了基于國內典型城市道路信息的能量優化控制方法及控制器實現,對國內典型城市典型交通信息流量進行統計記錄,形成擁有一定統計規律的與時間、線路地點有關的交通流量信息,配合GPS衛星導航系統,開發出具有實時調節性的優化能量分配算法,在經常擁堵的時刻或地段適時調整電動機驅動車輛策略,而路況較為暢通的時刻或地段采用發動機驅動車輛策略。所開發控制算法具有自學習功能,隨著控制策略的循環往復運行,能夠在線調節分配系數,實現純電動、發動機驅動和混合驅動三種模式的動態切換、變速器換擋點的動態調節以及制動能量回收幅度的動態調節。綜合油耗、電耗、充電時間間隔、電池成本等多個性能指標和約束條件,以達到更高的整車燃油經濟性,進一步提升動力系統的節油率。所開發算法內容結構如圖27所示。
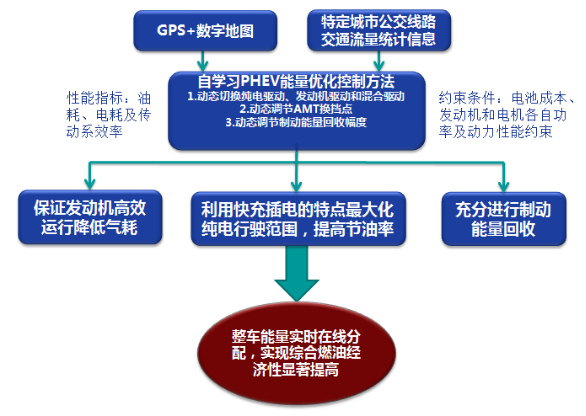
圖27 基于自學習的PHEV能量優化控制方法結構圖
???????
—— 制動能量回饋控制
傳統汽車在制動過程中,其動能除克服風阻和滾阻外,絕大部分能量則通過制動器摩擦生熱而消耗掉。回饋制動技術(又稱制動能量回收技術)是指汽車減速或制動時將其中一部分機械能轉化為其他形式的能量,并加以再利用的技術。由于回饋制動能將行駛車輛的一部分動能回收起來并加以再利用,因此,研究回饋制動技術對于提高新能源汽車的燃油經濟性、緩解能源危機、改善環境壓力具有及其重要的戰略意義。在制動能量回饋控制中,整車控制器根據加速踏板和制動踏板的開度以及動力電池的SOC值來判斷車輛此時能否進行制動能量回饋,并向電機控制器發出制動指令,回收能部分能量。制動能量回收目前是提高整車節油率的重要方式之一,怎樣利用機電耦合系統的特性最大限度回饋制動能量仍是目前需要解決的技術難題。同時,在回饋制動過程中遇到車輪抱死的情況,整車控制器怎樣與底層ABS系統進行協調控制,依然是該領域亟待解決的難題。因此,本測試平臺也對制動系統進行建模仿真。
為了保證整車的制動安全性,回饋制動系統常配合ABS系統協調工作。對于插電式混合動力商用車,回饋制動系統需要和氣壓ABS制動系統相互協調,才可以既保證制動安全性以及良好的能量回饋效率。其制動能量回饋系統結構如圖28所示。
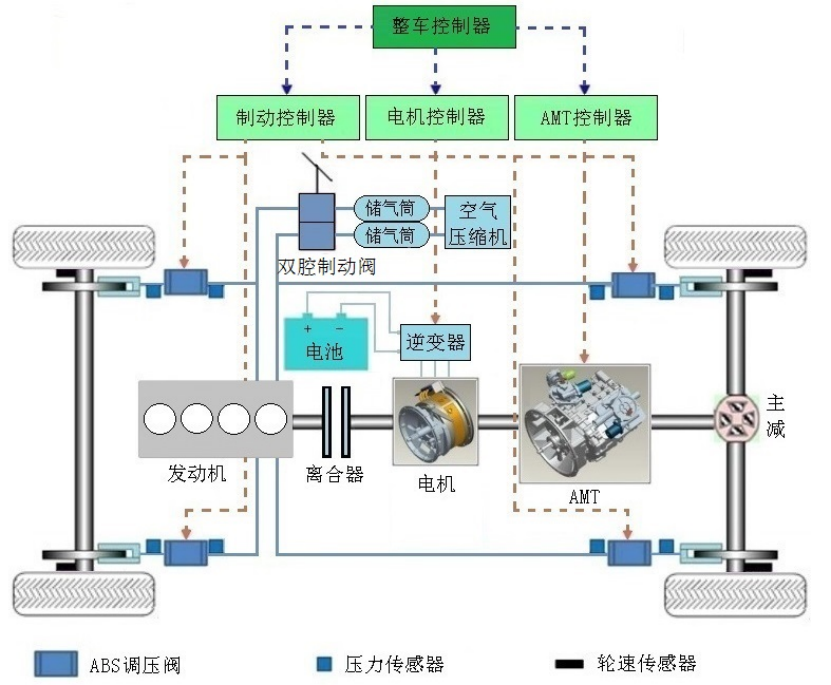
圖28 制動能量回饋系統結構框圖
整個回饋制動系統如圖28所示。其中,該制動踏板為行程踏板,它可以將制動踏板位置信號實時的傳送給制動控制器,以便制動控制器根據制動踏板行程信號來協調機械制動和回饋制動。回饋制動控制閥選用現行氣壓ABS系統常用的ABS調壓閥,該調壓閥為成熟的ABS產品部件,具有動作迅速、可靠性高的優良特性。整個回饋制動控制框圖如圖29所示。
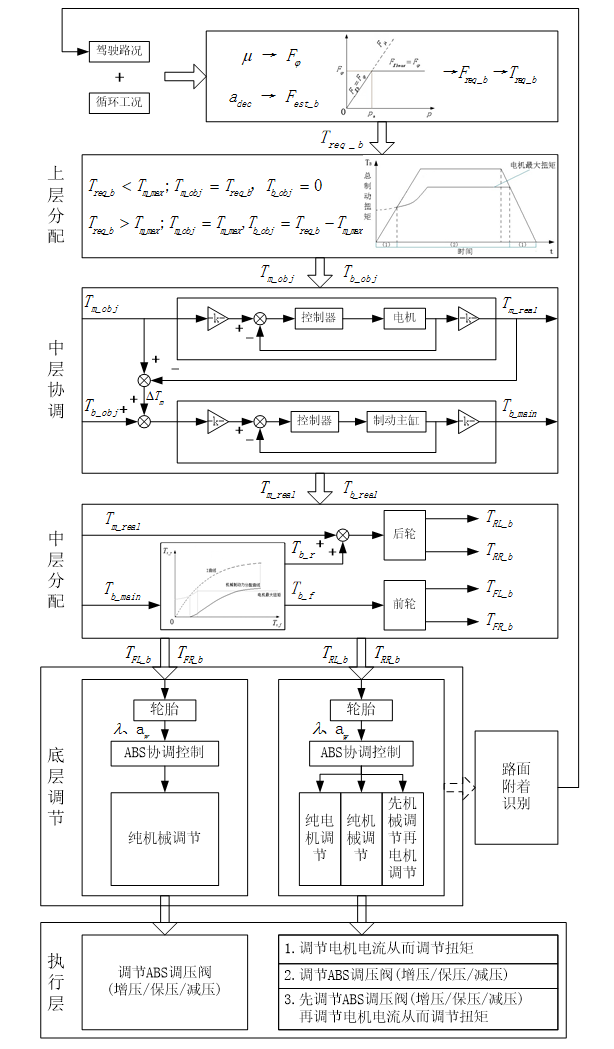
圖29回饋制動控制框圖
——整車控制策略
根據插電式混合動力整車控制器功能需求,所設計控制器軟件模塊示意圖如圖30所示。
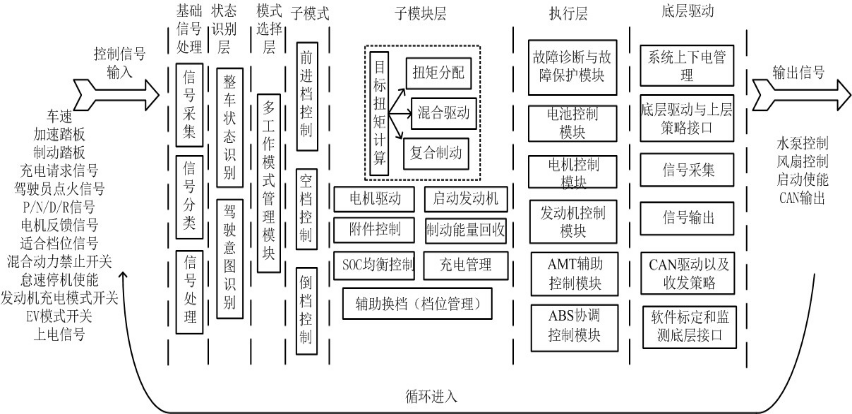
圖30 整車控制器軟件模塊示意圖
如圖30所示,整車控制器輸入信號包括駕駛員點火信號、車速信號、加速踏板和制動踏板信號、充電請求信號、停車/空擋/前進/倒擋信號、電機反饋信號、適合擋位信號、混合動力禁止開關信號、怠速停機使能信號、發動機充電模式開關信號、EV模式開關信號及上電信號等。輸出信號主要包括水泵控制信號、風扇控制信號、啟動使能信號及CAN輸出信號。具體控制流程如下步驟:
1)控制器在基礎信號處理層的信號采集模塊、信號分類模塊和信號處理模塊里將輸入信號進行采集、分類、處理;
2)在狀態識別層進行整車狀態識別和駕駛意圖判斷,判斷此時車是在驅動、制動、滑行等狀態,以及駕駛員需求加速減速等;
3)整車控制器在模式選擇層選擇整車運行模式,即純電驅動、發動機驅動、混合驅動、發動機主動充電及制動能量回收。
4)結合當前車輛實際運行狀態和駕駛員輸入決定進入具體相應的上層功能模塊,包括目標扭矩計算模塊、電機驅動控制模塊、啟動發動機模塊、附件控制模塊、SOC均衡控制模塊、充電管理模塊及輔助換擋模塊等;
5)經過上層各功能模塊的運算處理,上層將對執行層進行調用同時根據實際工況進行協調控制,執行層包括發動機、電機、電池控制模塊,輔助換擋調用模塊,ABS協調控制模塊及故障診斷與故障保護模塊;
6)各模塊程序的完成還需要對底層驅動集成,因此進入底層驅動層,包括系統上下電管理、底層驅動與上層策略接口、信號采集與信號輸出、CAN驅動及收發策略、軟件標定及底層接口檢測。
具體的整車控制器控制器系統流程圖如下圖所示。
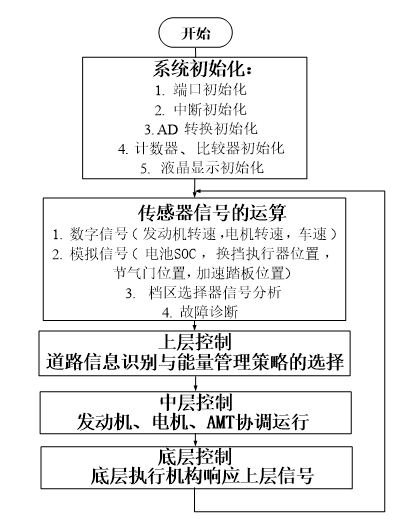
圖31 整車控制器控制系統流程圖
// 駕駛模擬器 //
駕駛模擬器支持人機共駕功能,可實現駕駛員在環測試、自動駕駛功能測試以及各類循環工況導入測試等。當采用給定的測試用例進行測試分析時,可利用PID構建駕駛員模型以跟蹤指定的需求車速,如下圖所示。為了適應不同場景需求,本實驗平臺搭載了經濟模式、舒適模式、運動模式三種控制模式。正常行駛時,三種模式可以自由地進行切換,經濟模式下,車輛油門的響應還會比較柔和,車輛行駛過程中會更加節能;舒適模式是為了獲得更好的乘坐舒適性,此模式下車子的油門響應是最平衡的,操控感更簡單舒適;運動模式下,油門與制動的靈敏度會更高,加速與制動響應更加快速,這個時候汽車的性能能夠很好體現出來。三種模式下的駕駛員模型參數有所不同,可通過標定的方式實現。
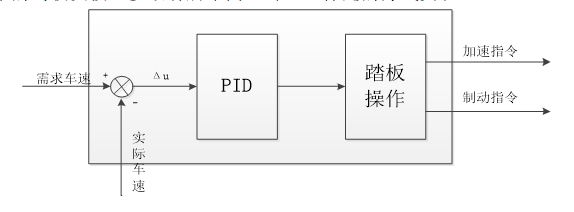
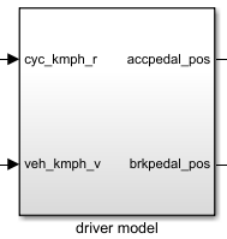
圖32 駕駛員模型
駕駛員在車輛行駛過程中會根據車輛運行狀態和周圍環境以及自己的駕駛習慣對加速踏板、制動踏板等采取一定的動作,這就是駕駛意圖。在“人—車—路”的閉環系統中,駕駛員可以看作一個自適應智能傳感器,而駕駛員意圖識別也就是將該傳感器的信號加以處理得到對車輛控制有用的信息。在自動駕駛時可以采用上述駕駛員模型進行跟蹤控制,當人工駕駛時,駕駛員行為對車輛燃油經濟性和安全性影響很大,因此,控制策略中應該引入駕駛員駕駛意圖識別,該模塊可根據基本的邏輯判別得到基于典型城市工況的駕駛員意圖,然后選擇最合適的能量優化控制策略,以充分發掘上層控制策略對于節油率提升的潛力。
目前關于駕駛員意圖識別進行的研究著重于對典型意圖的分類,例如超車、沖坡、減速、停車等,分析每一種意圖所相應的識別特征,根據采集到的數據分別進行模糊貼近度計算,再根據綜合判斷,識別出駕駛員的確切意圖以及相應的檔位操作原則。也有學者針對人的行為建立模型,提出了基于卡爾曼濾波的預測控制系統,將人看作擁有相當多的內部智力狀態的馬爾可夫器件,每一個狀態都有其特定的控制行為和內部狀態轉換概率;將駕駛員的操作與典型動作相比較,可以確定駕駛員想要執行的動作。
針對行駛環境的識別,大多數控制策略建立了一種遞階的行駛環境識別體系,底層由路面附著識別,行駛區域識別,坡道、彎道識別3個平行的部分組成,進行實時識別;上層根據底層的識別結果,進行相應的推理和決策,確定與當前行駛環境相適應的駕駛策略。將車輛行駛環境分為城市道路、擁擠道路、上坡、下坡和快速路五類,提取各類行駛環境的特征,選用設定時間內的七個參數,制定模糊規則來判斷車輛行駛環境,并設計自適應模糊判斷模型。并通過解釋結構模型,將駕駛員模型識別分為定量子模型和定性子模型兩個部分,定性子模型包含天氣情況、駕駛時間、經驗判斷(道路寬度、彎道大小、路面障礙等)等,通過模糊推理得到定性的結果,可以有效地避免彎道及坡道行駛時的誤升檔或頻繁換檔。
在駕駛員意圖識別過程中,駕駛員意圖難以用準確的數學模型來描述,屬于經驗型模型,模糊理論在經驗型模型的處理上有較大的優勢,是駕駛員意圖識別選用的主要方法。
-
傳感器
+關注
關注
2566文章
53008瀏覽量
767595 -
仿真
+關注
關注
52文章
4289瀏覽量
135884 -
動力系統
+關注
關注
1文章
304瀏覽量
21054
原文標題:智能混合動力系統仿真測試平臺開發
文章出處:【微信號:新能源入門客,微信公眾號:新能源入門客】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
混合動力車的快速控制原型、仿真及遠程監控系統報告
汽車動力系統解決方案集錦
新能源汽車動力系統設計資料精華
汽車動力系統大盤點:助你設計絕佳方案
本田第四代混合動力系統技術的設計思想和工作原理是什么
豐田普銳斯混合動力系統原理
混合動力系統研發的技術問題羅列
混合動力系統相關知識匯總

ISG型客車混合動力系統的仿真

關于雙電機混合動力系統的功能介紹和應用





 工商網監
工商網監
評論