") 自動駕駛算法框架的系統(tǒng)級設(shè)計
自動駕駛算法框架的系統(tǒng)級設(shè)計
3DCV有幸邀請到頂會作者Yihan Hu、Jiazhi Yang、Li Chen等與大家一起分享他們的最新文章,如果您有相關(guān)工作需要分享,文末可以聯(lián)系我們!
在公眾號「3D視覺工坊」后臺,回復(fù)「原論文」即可獲取pdf或代碼。
添加微信:dddvisiona,備注:SLAM,拉你入群。文末附行業(yè)細(xì)分群。
1 背景
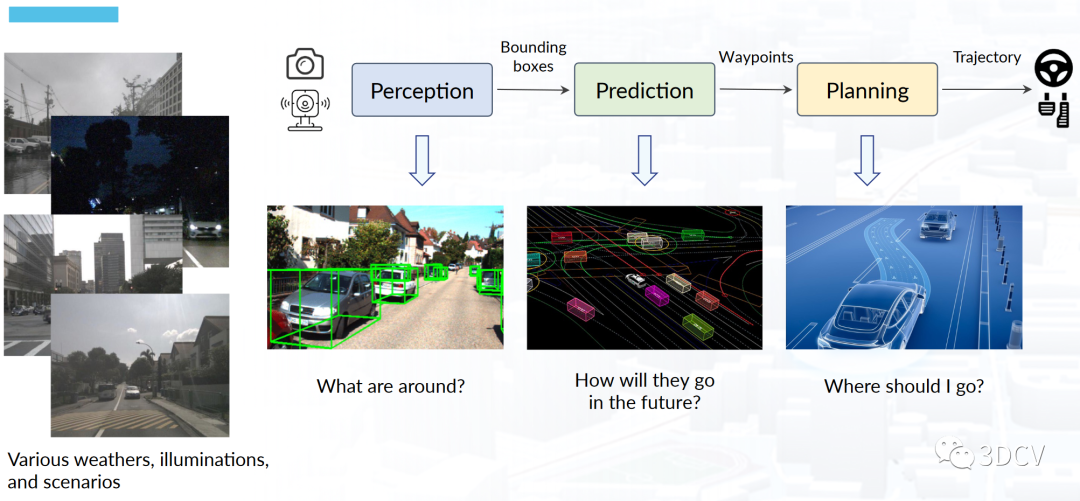
圖1 現(xiàn)代自動駕駛系統(tǒng)的系統(tǒng)流程。
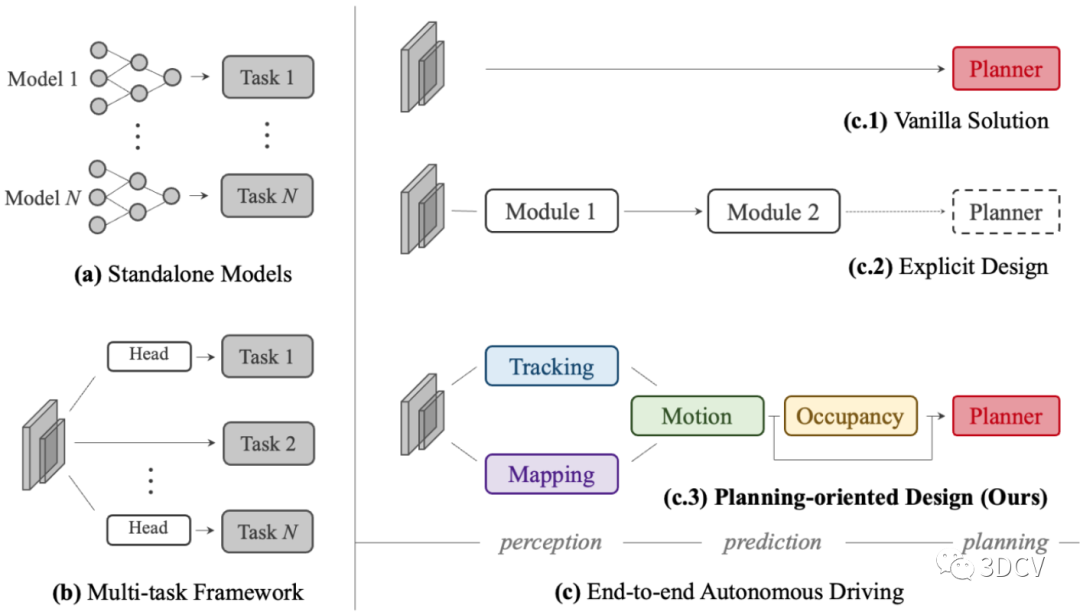
作者首先分析了現(xiàn)代自動駕駛系統(tǒng)的三大核心部分,分別是感知(Perception)、預(yù)測(prediction)和規(guī)劃(Planning),如圖1所示。已有的自動駕駛方法,要么為單個任務(wù)部署獨立的模型。要么,基于統(tǒng)一的特征提取骨干網(wǎng)絡(luò),然后為不同的任務(wù)設(shè)計單獨的”任務(wù)頭“。但是這兩種方案都存在問題,例如獨立的模型在聯(lián)合起來以后可能會遭遇累積誤差的問題,而多任務(wù)聯(lián)合學(xué)習(xí)的方案則可能不同的任務(wù)會相互拉扯,并不能有一個統(tǒng)一的優(yōu)化目標(biāo)。因此,作者提出了統(tǒng)一自動駕駛(UniAD)。這是一種最新的綜合框架,以最終的規(guī)劃(Planning)為目標(biāo)。將全棧駕駛?cè)蝿?wù)整合到一個網(wǎng)絡(luò)中。充分利用了每個模塊的優(yōu)勢,并從全局角度為agents交互提供了互補的特征抽象。任務(wù)通過統(tǒng)一的查詢接口進行溝通,方便彼此進行規(guī)劃。作者在nuScenes數(shù)據(jù)集上對UniAD,選擇nuScenes的原因是目前只有nuScenes提供了面向自動駕駛比較全面的任務(wù)標(biāo)注。最終的實驗結(jié)果顯示,UniAD取得了優(yōu)異的性能,遠(yuǎn)超先前的方法。
這里推薦一下3D視覺工坊最新自動駕駛課程:
[1]深度剖析面向自動駕駛領(lǐng)域的車載傳感器空間同步(標(biāo)定)
[2]國內(nèi)首個面向自動駕駛目標(biāo)檢測領(lǐng)域的Transformer原理與實戰(zhàn)課程
2 相關(guān)工作
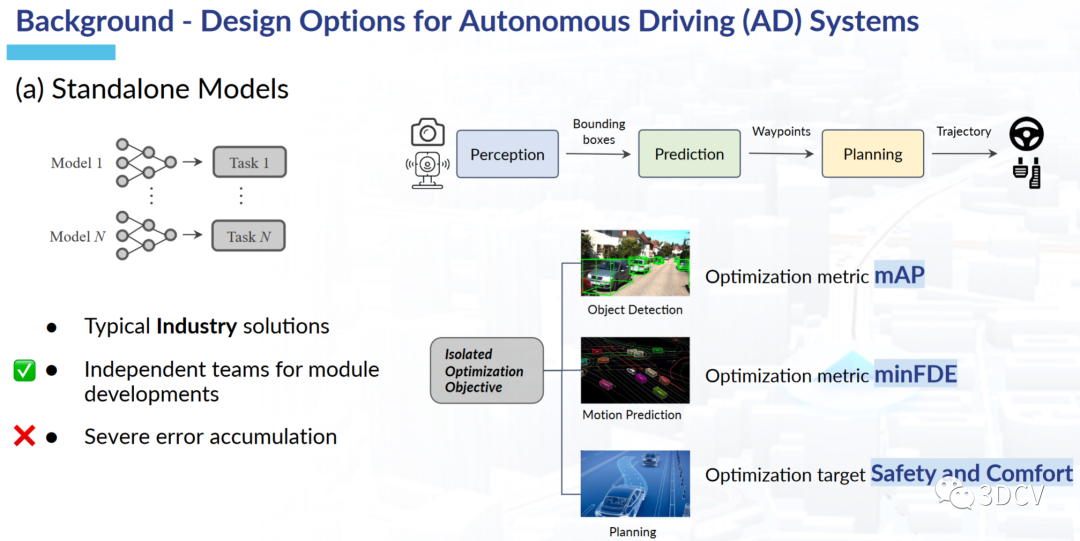
圖2 為單個任務(wù)部署單獨模型的方案
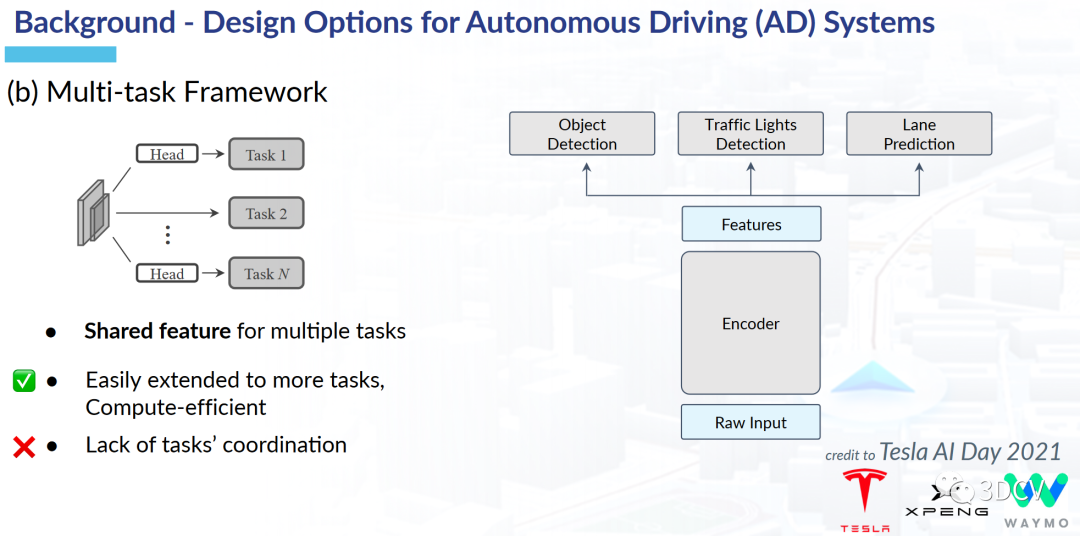
圖3 多任務(wù)聯(lián)合學(xué)習(xí)方案
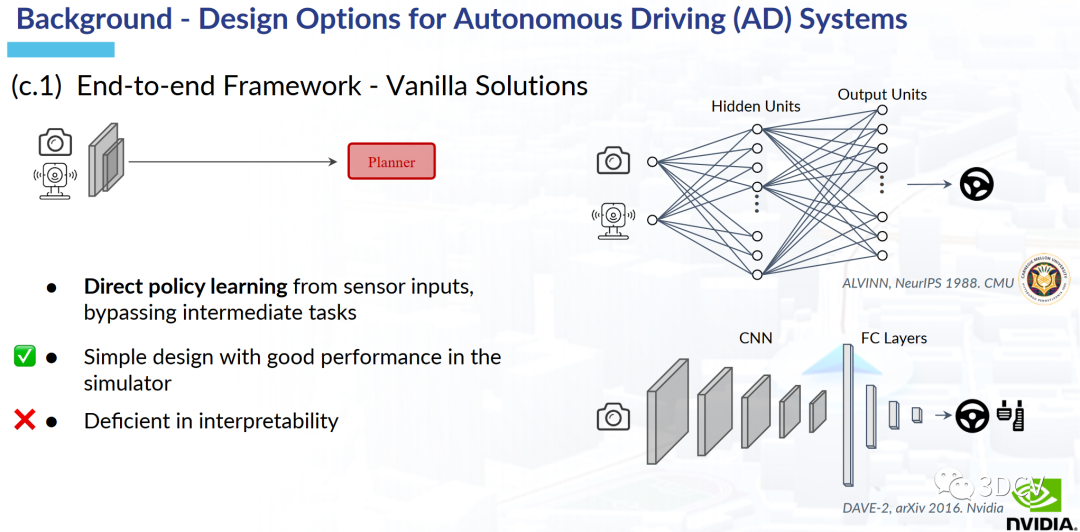
圖4 端到端的初步方案
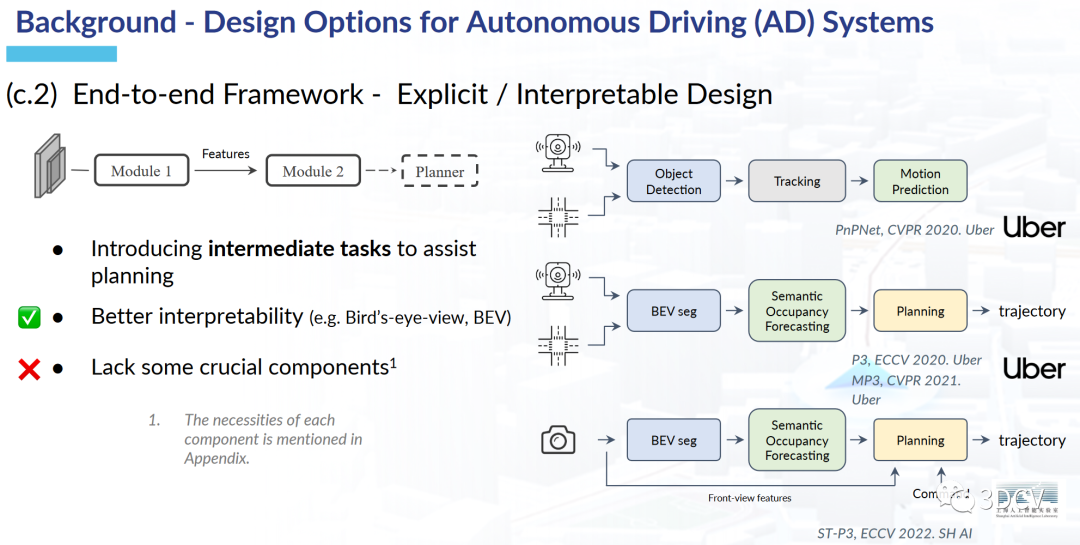
圖5 集成了部分中間任務(wù)的端到端方案圖2展示了為任務(wù)部署單獨模型的方案,這種方案在實驗室中其實已經(jīng)有很多例子了。這種方案確實在有些任務(wù)中會把指標(biāo)刷的很高,例如,物體檢測,語義分割等。但是在將所有的任務(wù)進行聯(lián)合以后,可能會產(chǎn)生累積誤差,導(dǎo)致最終的自動駕駛規(guī)劃結(jié)果并不是那么好。圖3展示了多任務(wù)聯(lián)合學(xué)習(xí)的方案,這種方案的優(yōu)勢是容易拓展且高效。但缺點是沒有一個統(tǒng)一的優(yōu)化目標(biāo),最終出來的結(jié)果可能會是多個任務(wù)“相互拉扯”的結(jié)果。圖4是端到端的初步方案,優(yōu)點是設(shè)計簡單,且在模擬環(huán)境下性能表現(xiàn)不錯。但是自動駕駛畢竟事關(guān)人命,這種缺乏可解釋性的黑盒方案還是比較難落地到實際環(huán)境中。圖5展示了集成了部分中間任務(wù)的端到端方案,這種方案其實有點接近UniAD了。但是缺點是缺少了自動駕駛的一些重要任務(wù)。
3 方法
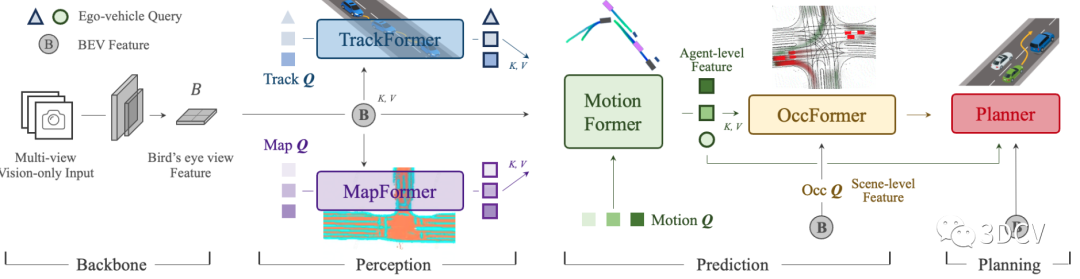
圖6 UniAD的框架流程圖如圖6所示,UniAD最終包括四個基于Transformer解碼器的感知和預(yù)測模塊以及一個規(guī)劃器。查詢 Q 起到連接各個任務(wù)的作用,以對駕駛場景中實體的不同交互進行建模。具體來說,將一系列多攝像頭圖像輸入特征提取器,并通過 BEVFormer 中現(xiàn)成的 BEV 編碼器將所得視圖特征轉(zhuǎn)換為統(tǒng)一的鳥瞰圖 (BEV) 特征 B。這里的特征提取部分(Backbone)是可以替換的。TrackFormer,負(fù)責(zé)檢測和跟蹤任務(wù)。MapFormer的作用是執(zhí)行全景分割。MotionFormer 捕獲agents之間的交互,并繪制和預(yù)測每個agents的未來軌跡。由于每個agents的動作都會顯著影響場景中的其他agents,因此該模塊對所有考慮的agents進行聯(lián)合預(yù)測。同時,設(shè)計了一個自我車輛查詢來顯式地建模車輛,并使其能夠在這種以場景為中心的范例中與其他agents進行交互。OccFormer 采用 BEV 特征 B 作為查詢,預(yù)測未來其他agents的占用情況。最后,Planner預(yù)測規(guī)劃結(jié)果,并使其遠(yuǎn)離 OccFormer 預(yù)測的占用區(qū)域以避免碰撞。
這里推薦一下3D視覺工坊最新自動駕駛課程:
[1]深度剖析面向自動駕駛領(lǐng)域的車載傳感器空間同步(標(biāo)定)
[2]國內(nèi)首個面向自動駕駛目標(biāo)檢測領(lǐng)域的Transformer原理與實戰(zhàn)課程
3.1 TrackFormer
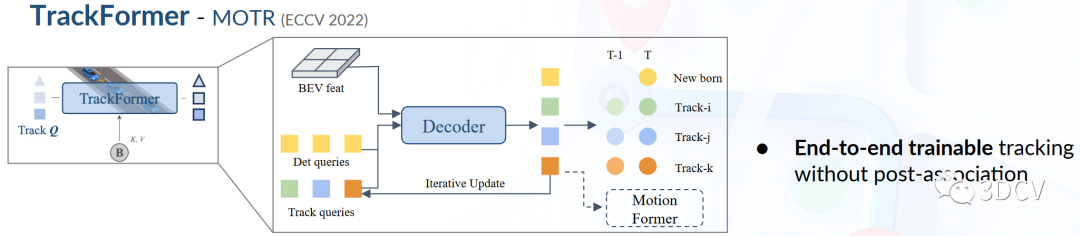
圖7 TrackFormer 流程圖圖7TrackFormer得具體流程圖,該方法采用類似Motr和MUTR3D的查詢設(shè)計思路,在對象檢測中只使用傳統(tǒng)的檢測查詢,并引入跟蹤查詢來實現(xiàn)跨幀跟蹤代理,實現(xiàn)檢測查詢與跟蹤查詢相結(jié)合的范式。具體來說,每一時刻,初始化的檢測查詢負(fù)責(zé)檢測第一次感知到的新出現(xiàn)代理,跟蹤查詢對之前幀中已經(jīng)檢測到的代理進行建模。檢測查詢和跟蹤查詢都通過考察BEV特征來獲取代理的抽象表達。隨著場景更新,當(dāng)前幀的跟蹤查詢與自注意力模塊中之前記錄的查詢進行交互,從而聚合時序信息,直到相應(yīng)代理完全消失(在特定時間內(nèi)未被跟蹤到)。TrackFormer通過多層網(wǎng)絡(luò),最終輸出狀態(tài)表示,為下游任務(wù)提供對環(huán)境中有效代理的編碼表達。除了對自主駕駛車輛周圍其他代理的查詢設(shè)計外,還在查詢集中引入了對自主車輛的專門查詢,以顯式對自身進行建模,這將在運動規(guī)劃中進一步使用。
3.2 MapFormer
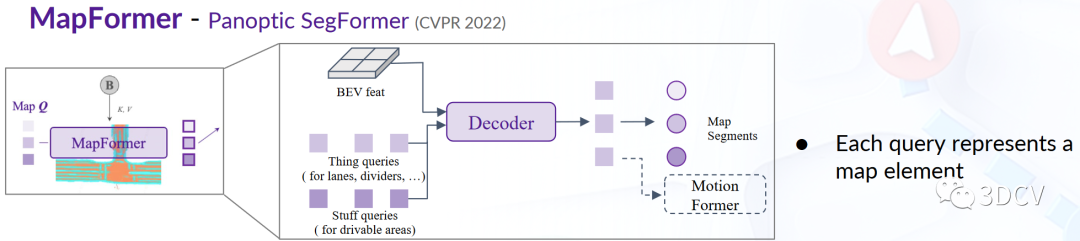
圖8 MapFormer流程圖圖8是該MapFormer的流程圖,基于2D全景分割方法Panoptic SegFormer,將道路元素表示為地圖查詢,以幫助下游任務(wù)進行預(yù)測,并編碼位置和結(jié)構(gòu)知識。針對自動駕駛場景,將車道線、分割線和十字路口設(shè)定為things類,將可行駛區(qū)域設(shè)定為stuff類。MapFormer的多層網(wǎng)絡(luò)都進行監(jiān)督,只有最后一層包含的新的地圖查詢被向前傳播到MotionFormer,以進行代理和地圖的交互。地圖查詢采用了稀疏表示,以編碼自動駕駛場景的關(guān)鍵道路元素,輔助運動預(yù)測任務(wù)。
3.3 MotionFormer
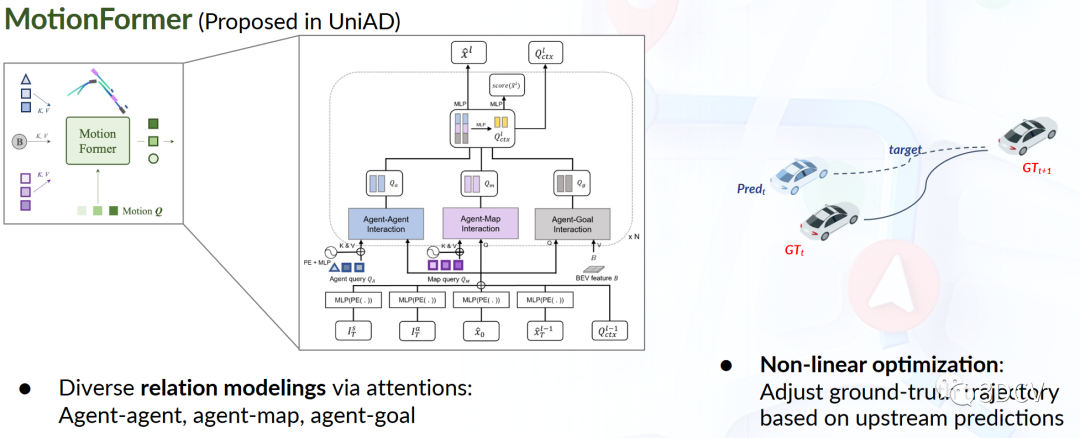
圖9 MotionFormer流程圖
圖9是MotionFormer流程圖。Transformer結(jié)構(gòu)對運動預(yù)測任務(wù)非常有效,基于此提出端到端的MotionFormer,它通過分別從TrackFormer和MapFormer對動態(tài)代理和靜態(tài)地圖進行高度抽象的查詢,以場景為中心的方式預(yù)測所有代理的多模態(tài)未來運動,即每個代理可能的多條未來軌跡。這種范式通過一次前向傳播即可生成整個場景中多個代理的軌跡,大大減少了將整個場景與每個代理對齊的計算量。同時,考慮到未來的動態(tài)情況,MotionFormer還傳入了來自TrackFormer對自主車輛的編碼查詢,以使自主車輛與其他代理進行交互。查詢抽象提供了場景編碼,輔助運動預(yù)測。
3.4 OccFormer
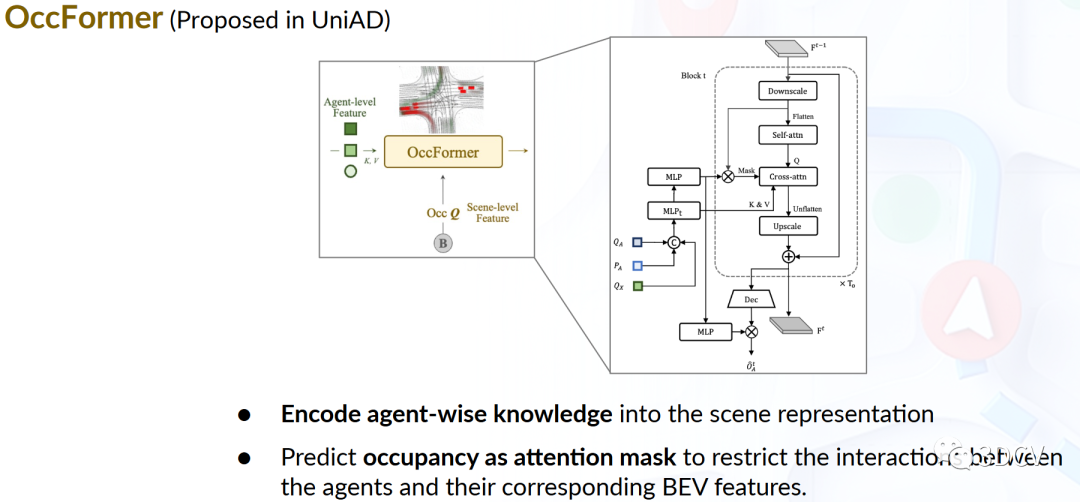
圖10 OccFormer流程圖圖10是 OccFormer流程圖。Occupancy柵格地圖是一種離散化的BEV表示,其每個柵格單元包含一個標(biāo)志位指示其是否被占用。Occupancy預(yù)測任務(wù)是預(yù)測柵格地圖未來的變化。之前的方法利用RNN沿時間維展開當(dāng)前觀測到的BEV進行預(yù)測,高度依賴手工設(shè)計的聚類后處理來為每個代理生成Occupancy,其將BEV特征壓縮到RNN隱狀態(tài)作為整體表示,因此缺乏對代理的建模。這導(dǎo)致其難以預(yù)測全局所有代理的行為,而這對場景演變至關(guān)重要。UniAD提出OccFormer,從場景級和代理級兩個層面結(jié)合語義信息:1)稠密場景特征在時間維上展開時,通過設(shè)計的注意力機制獲取代理級特征;2)通過代理特征和場景特征的矩陣乘法直接獲得實例級Occupancy,無需其他后處理。OccFormer可為運動規(guī)劃提供碰撞風(fēng)險較低的Occupancy預(yù)測。
3.5 Planning
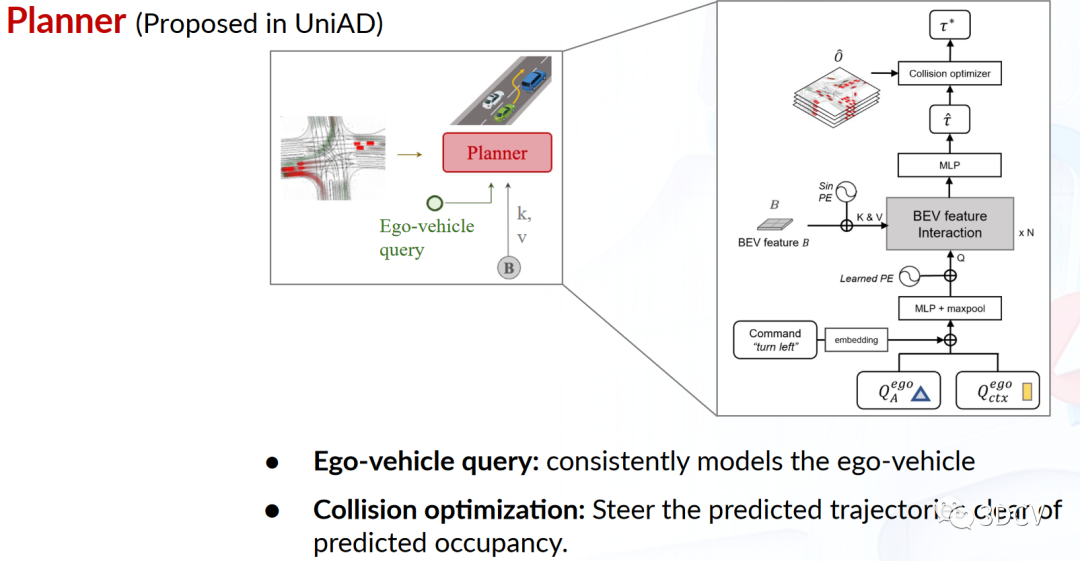
圖11 Planning流程圖圖11是Planning流程圖。是在沒有高精度地圖或預(yù)定義路線的情況下,規(guī)劃通常需要高級命令指示前進方向。因此,本文將原始導(dǎo)航信號轉(zhuǎn)換為三個可學(xué)習(xí)的embedding,稱為命令embedding。來自MotionFormer的自主車輛查詢已經(jīng)編碼了其多模態(tài)意圖,因此再配備命令embedding形成“規(guī)劃查詢”。該查詢作用于BEV特征,感知周圍環(huán)境,然后解碼得到未來的航點。命令embedding提供了高級導(dǎo)航意圖,輔助基于場景的無地圖導(dǎo)航規(guī)劃。規(guī)劃查詢結(jié)合自主車輛狀態(tài)和導(dǎo)航意圖,可實現(xiàn)端到端的條件路徑規(guī)劃。
4 實驗
更詳細(xì)的結(jié)果作者放在了補充材料里面,UniAD在nuScenes數(shù)據(jù)集上進行了實驗,從以下三個方面驗證了方法的有效性:
任務(wù)協(xié)同帶來的優(yōu)勢及其對規(guī)劃的影響。
和之前方法相比,每個子任務(wù)模塊的效果。
對特定模塊設(shè)計的消融實驗分析。
4.1 Joint Results
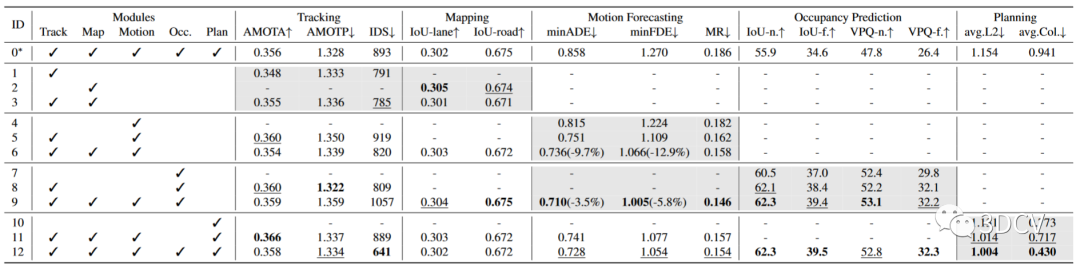
image.png
表1 每一個子任務(wù)有效性的消融實驗
作者進行了如表 1 所示的消融,以證明端到端管道中先前任務(wù)的有效性和必要性。此表的每一行顯示合并第二個模塊列中列出的任務(wù)模塊時的模型性能。第一行 (ID-0) 作為普通多任務(wù)基線,具有單獨的任務(wù)頭以進行比較。每個指標(biāo)的最佳結(jié)果以粗體標(biāo)記,第二名結(jié)果在每列中用下劃線標(biāo)記。由于與感知相比,預(yù)測更接近于規(guī)劃,因此我們首先研究框架中的兩種類型的預(yù)測任務(wù),即運動預(yù)測和占用預(yù)測。在Exp.10-12中,只有當(dāng)同時引入兩個任務(wù)時(Exp.12),與沒有任何中間任務(wù)的樸素端到端規(guī)劃(Exp.10)相比,規(guī)劃L2和碰撞率的指標(biāo)都達到了最佳結(jié)果。因此,得出的結(jié)論是,這兩個預(yù)測任務(wù)都是安全規(guī)劃目標(biāo)所必需的。退一步來說,在實驗 7-9 中,展示了兩種類型預(yù)測的協(xié)同效應(yīng)。當(dāng)兩個任務(wù)緊密集成時,它們的性能都會得到提高(Exp.9,-3.5% minADE,-5.8% minFDE,-1.3 MR(%),+2.4 IoUf.(%),+2.4 VPQ-f.(%) )),這證明了包括代理和場景表示的必要性。為實現(xiàn)運動預(yù)測,還探索感知模塊如何在實驗 4-6 中做出貢獻。值得注意的是,結(jié)合跟蹤和繪圖節(jié)點可以顯著改善預(yù)測結(jié)果(-9.7% minADE、-12.9% minFDE、-2.3 MR(%))。此外,還提出了實驗 1-3,它們表明一起訓(xùn)練感知子任務(wù)會產(chǎn)生與單個任務(wù)相當(dāng)?shù)慕Y(jié)果。此外,與樸素多任務(wù)學(xué)習(xí)(Exp.0)相比,Exp.12 在所有基本指標(biāo)上都顯著優(yōu)于它(-15.2% minADE、17.0% minFDE、-3.2 MR(% ))、+4.9 IoU-f.(%).、+5.9 VPQf.(%)、-0.15m avg.L2、-0.51 avg.Col.(%)),顯示了UniAD的優(yōu)越性。
4.2 Modular Results
按照感知預(yù)測規(guī)劃的順序,報告每個任務(wù)模塊的性能,并與 nuScenes 驗證集上的現(xiàn)有技術(shù)進行比較。UniAD 使用單個經(jīng)過訓(xùn)練的網(wǎng)絡(luò)聯(lián)合執(zhí)行所有這些任務(wù)。每個任務(wù)的主要指標(biāo)在表格中用灰色背景標(biāo)記。對于表2中的多目標(biāo)跟蹤,與 MUTR3D 和 ViP3D相比,UniAD 分別產(chǎn)生了 +6.5 和 +14.2 AMOTA(%) 的顯著改進。此外,UniAD 獲得了最低的 ID 切換分?jǐn)?shù),顯示了每個 tracklet 的時間一致性。對于表 3 中的在線地圖(Online mapping),UniAD 在分段車道上表現(xiàn)良好(與 BEVFormer 相比,+7.4 IoU(%)),這對于運動模塊中的下游智能道路交互至關(guān)重要。由于UniAD的跟蹤模塊遵循端到端范例,它仍然不如具有復(fù)雜關(guān)聯(lián)的檢測跟蹤方法,例如 Immortal Tracker,并且UniAD的映射結(jié)果落后于之前針對特定類別的面向感知的方法。作者認(rèn)為 UniAD 是通過感知信息來促進最終規(guī)劃,而不是通過完整的模型能力來優(yōu)化感知。
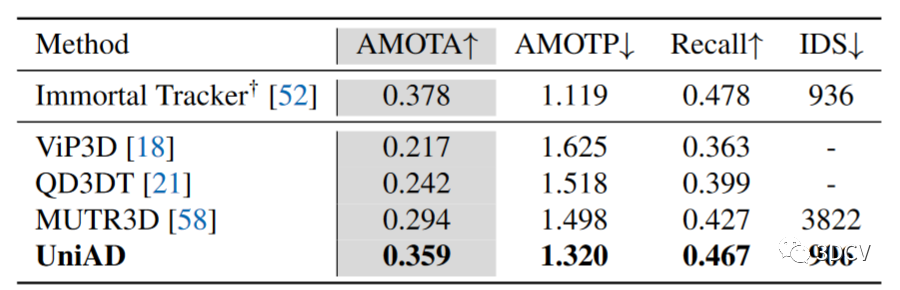
表2 多目標(biāo)跟蹤結(jié)果
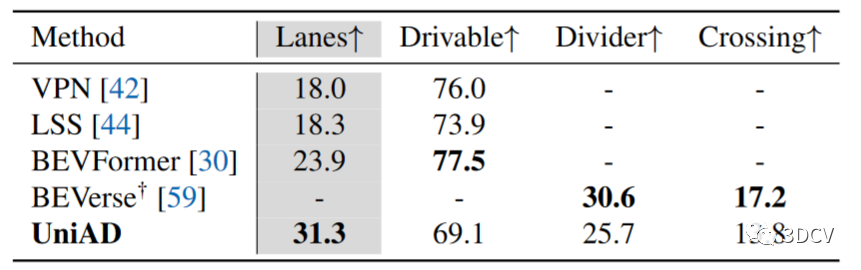
表3 Online mapping結(jié)果
運動預(yù)測結(jié)果如表4所示,其中 UniAD 明顯優(yōu)于之前基于視覺的端到端方法。與 PnPNet-vision 和 ViP3D相比,它在 minADE 上的預(yù)測誤差分別減少了 38.3% 和 65.4%。就表5中報告的Occupancy預(yù)測而言,UniAD 在附近區(qū)域取得了顯著的進步,與大量增強的 FIERY和 BEVerse 相比,在 IoU-near(%) 上分別獲得了 +4.0 和 +2.0的提升。受益于自我車輛查詢和占用中豐富的時空信息,UniAD 與 ST-P3 相比,就規(guī)劃范圍的平均值而言,將規(guī)劃 L2 錯誤和碰撞率降低了 51.2% 和 56.3% 。此外,它的性能明顯優(yōu)于幾種基于激光雷達的同類產(chǎn)品,這是非常難得的結(jié)果。
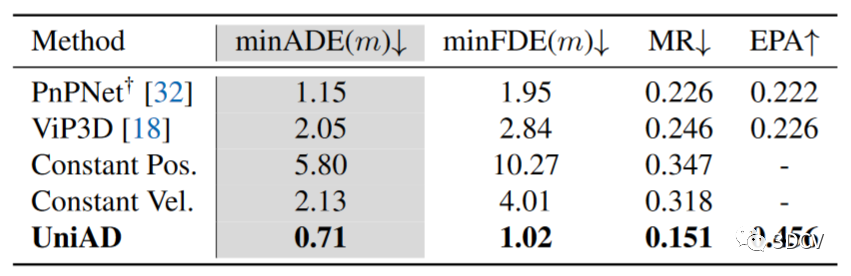
表4 運動預(yù)測結(jié)果
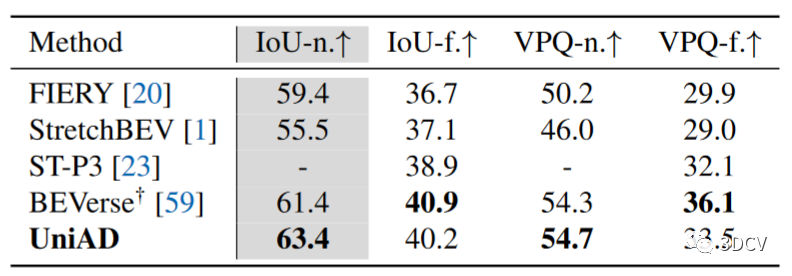
表5 Occupancy預(yù)測
4.3 Ablation Study
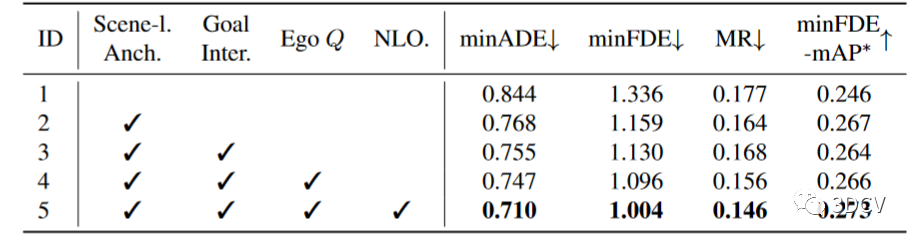
表6 運動預(yù)測模塊中設(shè)計的消融。表6顯示了UniAD在論文第 2 節(jié)中描述的所有建議組件。2.2 為 minADE、minFDE、Miss Rate 和 minFDE-mAP 指標(biāo)的最終性能做出貢獻。值得注意的是,旋轉(zhuǎn)的場景級錨點顯示出顯著的性能提升(15.8% minADE、-11.2% minFDE、+1.9 minFDE-mAP(%)),表明以場景為中心的方式進行運動預(yù)測是至關(guān)重要的。agents-目標(biāo)點交互通過面向規(guī)劃的視覺特征增強了運動查詢,周圍的agents可以從考慮自我車輛的意圖中進一步受益。此外,非線性優(yōu)化策略通過考慮端到端的感知不確定性,提高了性能(-5.0% minADE、-8.4% minFDE、-1.0 MR(%)、+0.7 minFDE-mAP(%))。
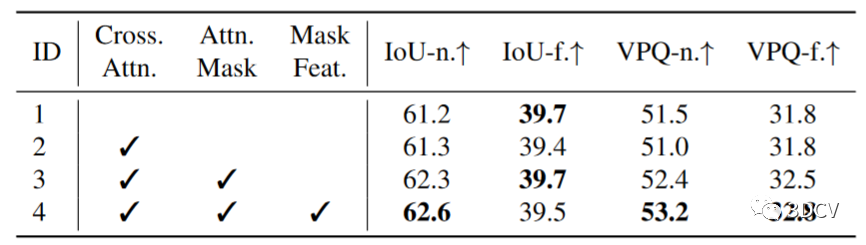
表7 占用預(yù)測模塊中設(shè)計的消融。如表7所示,與無注意力基線(實驗 1)相比,在沒有局部性約束的情況下關(guān)注所有代理的每個像素(實驗 2)會導(dǎo)致性能稍差。The occupancy-guided attention mask解決了問題并帶來了增益,特別是對于附近區(qū)域(Exp.3,+1.0 IoU-n.(%),+1.4 VPQ-n.(%))。此外,重用掩模特征而不是代理特征來獲取占用特征進一步增強了性能。
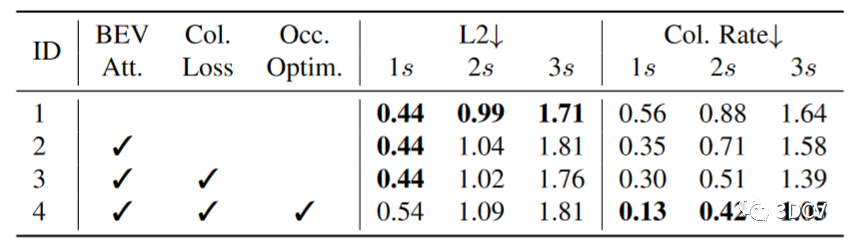
表8 規(guī)劃模塊中設(shè)計的消融。表8是對規(guī)劃模塊行了消融,即關(guān)注 BEV 特征、碰撞損失訓(xùn)練以及占用優(yōu)化策略。為了安全性,較低的碰撞率優(yōu)于樸素軌跡模仿(L2 度量),并且在 UniAD 中應(yīng)用的所有部件中,碰撞率都會降低。
5 總結(jié)與未來展望
本文討論自動駕駛算法框架的系統(tǒng)級設(shè)計。面向規(guī)劃的終極追求,提出了以規(guī)劃為導(dǎo)向的管道,即UniAD。我們對感知和預(yù)測中每個模塊的必要性進行了詳細(xì)的分析。為了統(tǒng)一任務(wù),提出了一種基于查詢的設(shè)計來連接 UniAD 中的所有節(jié)點,從而受益于環(huán)境中代理交互的更豐富的表示。大量的實驗從各個方面驗證了所提出的方法。但是,協(xié)調(diào)這樣一個具有多個任務(wù)的綜合系統(tǒng)并非易事,需要大量的計算能力,尤其是計算能力。如何設(shè)計和管理系統(tǒng)以實現(xiàn)輕量級部署值得未來探索。此外,是否納入更多的任務(wù),如深度估計、行為預(yù)測,以及如何將它們嵌入到系統(tǒng)中,也是未來值得研究的方向。
-
算法
+關(guān)注
關(guān)注
23文章
4631瀏覽量
93434 -
框架
+關(guān)注
關(guān)注
0文章
403瀏覽量
17558 -
自動駕駛
+關(guān)注
關(guān)注
785文章
13946瀏覽量
167112
原文標(biāo)題:5 總結(jié)與未來展望
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論