") “高精度”定位技術(shù)RTK,僅僅是差分GPS嗎?
“高精度”定位技術(shù)RTK,僅僅是差分GPS嗎?

高精度”定位技術(shù)RTK,僅僅是差分GPS嗎?
高精度定位技術(shù)
關(guān)于高精度定位技術(shù),RTK為業(yè)界熟知且被廣泛應(yīng)用,那么RTK到底是什么?僅僅是差分GPS嗎?
其實(shí)并不盡然。
RTK
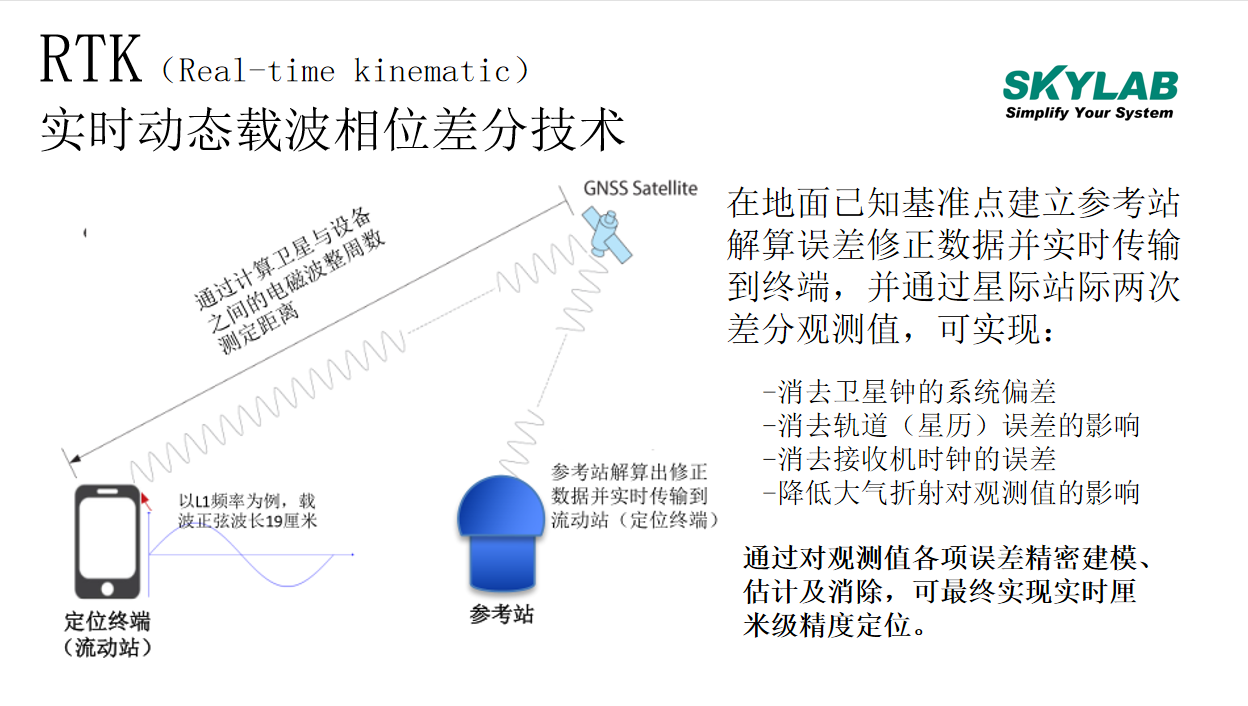
RTK,載波相位差分技術(shù),是實(shí)時(shí)處理兩個(gè)測(cè)站載波相位觀測(cè)量的差分方法,英文全稱Real Time Kinematic,譯為實(shí)時(shí)動(dòng)態(tài),然后這個(gè)實(shí)時(shí)動(dòng)態(tài)是怎么來的,RTK現(xiàn)如今在智能駕駛中處于什么地位?
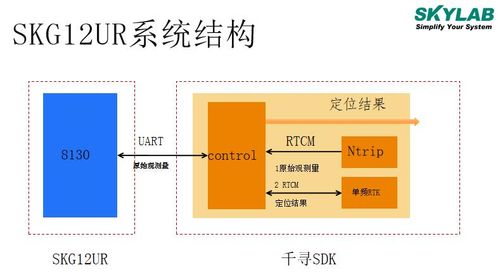
RTK是將基準(zhǔn)站采集的載波相位發(fā)給用戶接收機(jī),進(jìn)行求差解算坐標(biāo)。載波相位差分可使定位精度達(dá)到厘米級(jí)。目前測(cè)量中常用的動(dòng)態(tài)測(cè)量方法主要是RTK和連續(xù)運(yùn)行參考站系統(tǒng)( Continuous Operational Reference Systems)簡稱CORS。
1
傳統(tǒng)RTK****
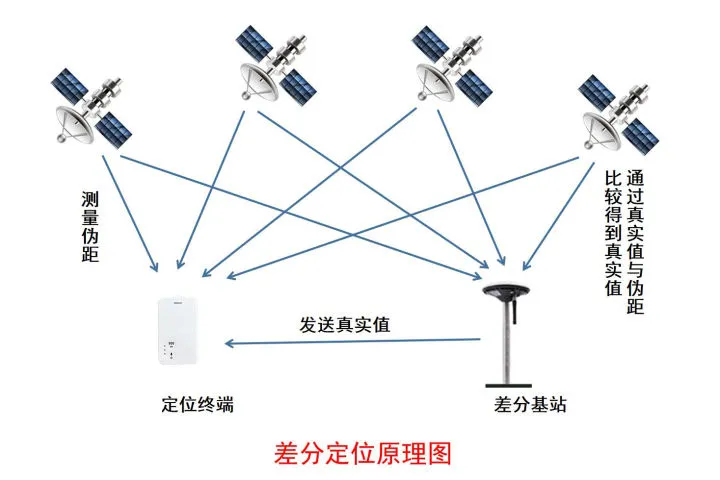
所謂RTK定位是將參考站的單點(diǎn)定位的觀測(cè)結(jié)果與參考站的已知坐標(biāo)進(jìn)行比較,計(jì)算出參考站至衛(wèi)星的距離改正數(shù),并將改正數(shù)發(fā)送給移動(dòng)臺(tái),移動(dòng)臺(tái)則根據(jù)參考站的改正數(shù),實(shí)時(shí)對(duì)定位結(jié)果進(jìn)行改正,從而提高定位精度。目前單基站RTK定位方法中有偽距法和載波相位法,因載波相位差分法比其他幾種方法的精度要高,因此目前市場(chǎng)上主流RTK儀器的解算方法也多為載波相位差分法。
2
CORS
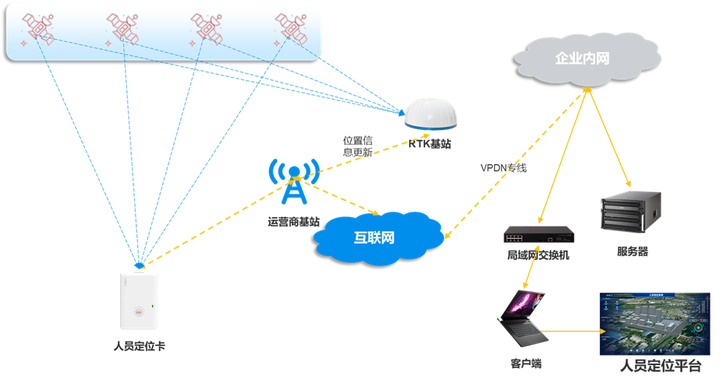
CORS可以定義為一個(gè)或若干個(gè)固定的、連續(xù)運(yùn)行的GNSS參考站,利用現(xiàn)代計(jì)算機(jī)、數(shù)據(jù)通信和互聯(lián)網(wǎng)(LAN/WAN)技術(shù)組成的網(wǎng)絡(luò),實(shí)時(shí)地向不同的類型、不同需求、不同層次的用戶自動(dòng)地提供經(jīng)過檢驗(yàn)的不同類型的GNSS觀測(cè)值(載波相位,偽距),各種改正數(shù)、狀態(tài)信息、以及其他有關(guān)的GNSS服務(wù)項(xiàng)目的系統(tǒng)。它是在RTK技術(shù)的基礎(chǔ)上發(fā)展而來。
CORS技術(shù)在用途上可以分成單基站CORS、多基站CORS和網(wǎng)絡(luò)CORS。
單基站CORS:**** 就是只有一個(gè)連續(xù)運(yùn)行站。類似于一加一或一加多的RTK,只不過基準(zhǔn)站是由一個(gè)連續(xù)運(yùn)行的基站代替,基站同時(shí)又是一個(gè)服務(wù)器,通過NRS-SERVER軟件實(shí)時(shí)監(jiān)控衛(wèi)星狀態(tài),存儲(chǔ)靜態(tài)數(shù)據(jù)和實(shí)時(shí)通過網(wǎng)絡(luò)向移動(dòng)站(用戶終端)發(fā)送差分信息。
多基站CORS:**** 就是分布在一定區(qū)域內(nèi)的多個(gè)基站聯(lián)合作業(yè),基站與基站之間的距離不超過50公里,他們都將數(shù)據(jù)發(fā)送到一個(gè)服務(wù)器。移動(dòng)站作業(yè)時(shí),只要發(fā)送它的位置信息到服務(wù)器,系統(tǒng)自動(dòng)計(jì)算移動(dòng)站與各個(gè)基站之間的距離,將距離近的基站差分?jǐn)?shù)據(jù)發(fā)送給流動(dòng)站,確保達(dá)到最佳的測(cè)量精度。多基站CORS作業(yè)原理與單基站基本相同。
網(wǎng)絡(luò)CORS:**** 就是采用網(wǎng)絡(luò)參考站系統(tǒng)軟件,對(duì)分布在一定區(qū)域內(nèi)的多臺(tái)基準(zhǔn)站的坐標(biāo)和實(shí)時(shí)觀測(cè)數(shù)據(jù)進(jìn)行系統(tǒng)綜合誤差改正建模,盡可能消除區(qū)域內(nèi)流動(dòng)站觀測(cè)數(shù)據(jù)的系統(tǒng)綜合誤差,從而獲得高精度的實(shí)時(shí)定位結(jié)果。
RTK和CORS有區(qū)別嗎? 當(dāng)然,CORS是固定的永不斷電的基站,優(yōu)點(diǎn)就是作用距離遠(yuǎn),作業(yè)方便,缺點(diǎn)是費(fèi)電,維護(hù)費(fèi)用高,局限某個(gè)地區(qū);RTK是可移動(dòng)的基站作業(yè),優(yōu)點(diǎn)是機(jī)動(dòng)性強(qiáng)、可以跨地區(qū)工作,缺點(diǎn)是做點(diǎn)校正繁瑣。
無論是RTK還是CORS都需要基站的支持才能使用,目前國內(nèi)部分城市已經(jīng)建成覆蓋全市區(qū)的CORS,移動(dòng)站需要登錄才能使用。
3
SBAS(DGPS)
SBAS(Satellite-Based Augmentation System),即星基增強(qiáng)系統(tǒng),通過地球靜止軌道(GEO)衛(wèi)星搭載衛(wèi)星導(dǎo)航增強(qiáng)信號(hào)轉(zhuǎn)發(fā)器,可以向用戶播發(fā)星歷誤差、衛(wèi)星鐘差、電離層延遲等多種修正信息,實(shí)現(xiàn)對(duì)于原有衛(wèi)星導(dǎo)航系統(tǒng)定位精度的改進(jìn),從而成為各航天大國競(jìng)相發(fā)展的手段。目前,全球已經(jīng)建立起了多個(gè)SBAS系統(tǒng),如美國的WAAS(Wide Area Augmentation System)、俄羅斯的SDCM(System for Differential Corrections and Monitoring)、歐洲的EGNOS(European Geostationary Navigation Overlay Service)、日本的MSAS(Multi-functional Satellite Augmentation System)以及印度的GAGAN(GPS Aided Geo Augmented Navigation)。
上述SBAS系統(tǒng)的工作原理大致相同。首先,由大量分布極廣的差分站(位置已知)對(duì)導(dǎo)航衛(wèi)星進(jìn)行監(jiān)測(cè),獲得原始定位數(shù)據(jù)(偽距、衛(wèi)星播發(fā)的相位等)并送至中央處理設(shè)施(主控站),后者通過計(jì)算得到各衛(wèi)星的各種定位修正信息,通過上行注入站發(fā)給GEO衛(wèi)星,最后將修正信息播發(fā)給廣大用戶,從而達(dá)到提高定位精度的目的。
SBAS服務(wù)可以免費(fèi)使用,但部分地區(qū)沒有信號(hào)覆蓋。在定位板卡模塊中以參數(shù)“DGPS”給出定位精度,一般精度為0.4m。
4
PPP- RTK
實(shí)時(shí)動(dòng)態(tài)定位RTK(Real-Time Kinematic)以及精密單點(diǎn)定位PPP(Precise Point Positioning)是高精度衛(wèi)星導(dǎo)航定位中應(yīng)用最為廣泛、最具代表性的技術(shù)。
2005年,PPP-RTK的概念被首次提出,通過CORS網(wǎng)數(shù)據(jù)處理將GNSS各類誤差在“狀態(tài)域”建模,采用非差PPP實(shí)現(xiàn)與RTK相當(dāng)?shù)亩ㄎ恍Ч?/p>
PPP-RTK通過狀態(tài)域建模,將基準(zhǔn)站“觀測(cè)值誤差”分解為衛(wèi)星軌道、衛(wèi)星鐘差、衛(wèi)星相位偏差、電離層延遲、對(duì)流程延遲等“狀態(tài)量誤差”,因此RTK和PPP/PPP-RTK也分別稱為“觀測(cè)值域差分”和“狀態(tài)域差分”。 不嚴(yán)格的說,數(shù)學(xué)意義上可以認(rèn)為衛(wèi)星軌道、衛(wèi)星鐘差、衛(wèi)星相位偏差、電離層延遲、對(duì)流程延遲等狀態(tài)量誤差構(gòu)成了GNSS觀測(cè)誤差空間的一組極大線性無關(guān)向量組,即構(gòu)成了GNSS觀測(cè)誤差空間的一組基。該空間中任意向量,即觀測(cè)值誤差都可以認(rèn)為是該組基向量的線性組合:基向量在對(duì)應(yīng)衛(wèi)星-接收機(jī)視線方向上的投影。
PPP-RTK是一種更具彈性的服務(wù)模式,主要體現(xiàn)在,衛(wèi)星軌道鐘差、相位偏差作為GNSS高精度定位的基礎(chǔ),可采用狀態(tài)域表達(dá)實(shí)現(xiàn)星基增強(qiáng)服務(wù),對(duì)于電離層延遲、對(duì)流層延遲增強(qiáng),則可通過采樣頻率的調(diào)整以滿足不同參考站密度、不同播發(fā)帶寬、不同用戶性能需求。
審核編輯 黃宇
-
gps
+關(guān)注
關(guān)注
22文章
2986瀏覽量
169332 -
定位
+關(guān)注
關(guān)注
5文章
1443瀏覽量
35964 -
RTK
+關(guān)注
關(guān)注
8文章
158瀏覽量
38158
發(fā)布評(píng)論請(qǐng)先 登錄
高精度定位技術(shù)RTK(實(shí)時(shí)動(dòng)態(tài)定位:Real-TimeKinematic)
支持RTK的兩款高精度定位模塊
介紹一個(gè)支持RTK差分定位的高精度導(dǎo)航定位模塊
一文讀懂RTK技術(shù)及支持RTK高精度定位模塊應(yīng)用方向
如何對(duì)RTK高精度定位算法進(jìn)行驗(yàn)證
北斗RTK高精度定位技術(shù)原理及優(yōu)勢(shì)
GPS/北斗RTK差分定位系統(tǒng)的原理以及應(yīng)用領(lǐng)域
什么是高精度定位平板?
北斗RTK高精度定位系統(tǒng)介紹
化工廠室外GPS 北斗RTK差分人員定位系統(tǒng)解決方案
北斗RTK高精度定位技術(shù)原理、技術(shù)優(yōu)勢(shì)及應(yīng)用領(lǐng)域

GPS/北斗RTK差分定位系統(tǒng)的技術(shù)原理以及應(yīng)用領(lǐng)域
動(dòng)態(tài)差分技術(shù)突破:頂堅(jiān)RTK高精度執(zhí)法儀實(shí)現(xiàn)鐵路隱患排查精準(zhǔn)防控






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論