 UWB數據傳輸和雷達成像功能概述
UWB數據傳輸和雷達成像功能概述

在之前的文章《一文講透超寬帶(UWB)前世今生》中,我們從起源、定義、標準、發展、應用等角度概述了UWB技術。根據UWB的特性,其基礎功能分為:數據傳輸、雷達成像、測距定位。接下來我們將概述其數據傳輸和雷達成像功能,并對UWB當前的主要運用:測距定位功能進行深入解析。
數據傳輸功能概述
1.1UWB數據傳輸原理
UWB利用納秒級的非正弦波窄脈沖傳輸數據,因此所占的頻譜范圍很寬。UWB實質是脈沖調制波,它通過對具有很陡的上升和下降時間的沖擊脈沖進行直接調制,而非使用傳統的無線傳輸方式所采用的載波調制。UWB發射的信號既可看成是基帶信號(從常規無線電考慮),也可看成是射頻信號(從發射信號頻譜分量考慮)。
UWB具有天然的安全性,由于UWB信號一般把信號能量彌散在極寬的頻帶范圍內,對于一般通信系統來說,UWB信號相當于白噪聲信號,從電子噪聲中將脈沖信號檢測出來是一件非常困難的事。
UWB的射頻部分采用隨機編碼對UWB脈沖信號進行偽隨機化后,脈沖監聽將更加困難。
實際應用中,CCC聯盟與802.15.4工作組提出在UWB的PHY層和數據鏈路層中,在每一幀的發送中,都對整體數據與時間戳加密(防篡改時間戳),這樣使UWB通信有了極高的安全性。
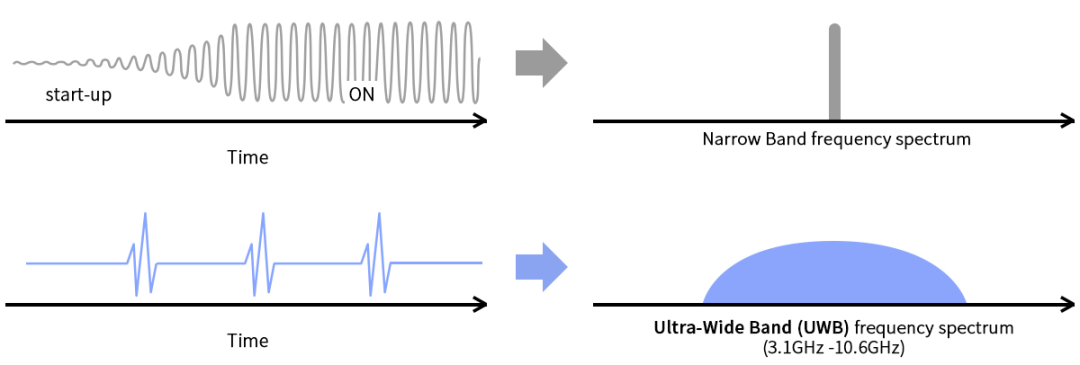
圖2 UWB數據傳輸
1.2UWB數據傳輸應用
UWB的標準中主要定義了相關的物理層與鏈路層,所以并沒有一個類似于藍牙的協議棧,因此用戶可以直接將自己的數據向信道中發送,如蘋果所使用的U1芯片,采用的UWB的協議就是蘋果自行定義的私有協議,對于任何一個UWB的組織用戶都可以使用自己的通訊協議進行數據的交流。
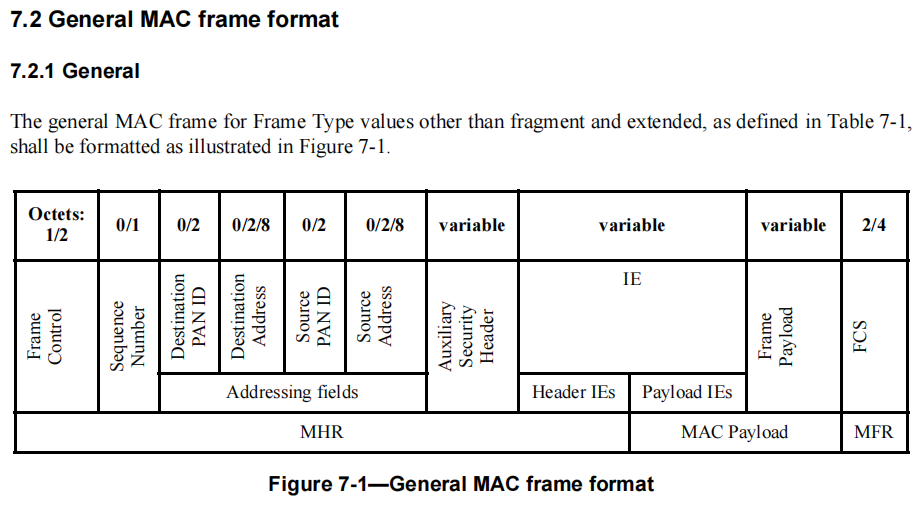
圖3 UWB在802.15.4中定義的MAC層通用幀格式
如上圖,UWB芯片的SDK包中,給到的用戶的發送函數直接為發送數據的API,用戶需要自己配置mac地址,配置信道,而所有的UWB芯片當配置一致的情況下,其實都是能夠監聽到數據的。所有的數據傳輸實際上都是由使用的廠商自定義的。
雷達成像功能概述
2.1UWB雷達原理
“雷達”是英文Radar的音譯,Radar是Radio Detection and Ranging的縮寫,意為“無線電探測和測距”,即用無線電探測目標并測定目標的空間位置。雷達也被稱做“無線電定位”。其原理是雷達設備發射電磁波對目標進行照射并接收其回波,由此獲得目標至電磁波發射點的距離、徑向速度、方位、高度等信息。
UWB利用超短脈沖信號,通過測量信號的時延和幅度來確定目標的位置和速度。因此,UWB可用作雷達成像。UWB雷達的超寬帶信號帶寬非常寬,可以達到幾個GHz。這種信號具有很短的脈沖寬度和很高的峰值功率,可以穿透障礙物并在復雜環境中進行探測。
UWB雷達發射脈沖信號,并接收該脈沖信號經障礙物反射后的回波,通過對回波擾動的分析來判斷UWB雷達附近是否存在物體,這種檢測方式我們稱之為CIR(Channel Impulse Response,信道脈沖響應)技術。UWB雷達通過接收到的CIR來探測周圍物體及其運動。當UWB雷達周圍有物體時,CIR對應位置就會有脈沖峰;當周圍物體運動時,由于多普勒效應,對應的CIR值就會變化。通過分析CIR頻譜來估計目標運動狀態。
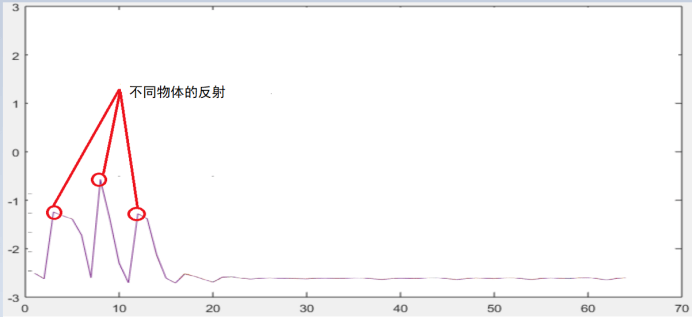
圖4 UWB在不同物體的CIR表現
2.2UWB成像原理
UWB成像技術是UWB雷達的擴展應用,UWB成像可以簡單理解為UWB脈沖波組成一堵無形的墻,這面墻向前走的時候碰到任何物體都會局部反彈回去,這面初始平整的墻返回的時候就有了凹凸變化,這個凹凸變化就描繪出了物體的一個面。
UWB成像通過軟件算法解析實現,對于UWB硬件底層,只需要將檢測的這一個區域變化的曲線,如上圖的一個整體趨勢告知算法,用算法的運算來描繪出物體的樣貌,這種成像的方式是應用層所關注且通用的,除UWB雷達外,底層硬件不管使用毫米波雷達還是激光雷達,其成像原理都是采用的這種方式。
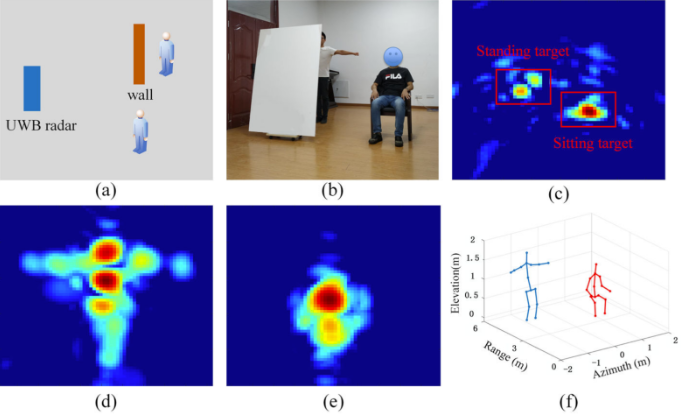
圖5 UWB雷達成像原理
2.3UWB雷達成像應用
當前UWB雷達成像應用最廣泛的領域主要包括:
軍事領域:便攜式UWB穿墻雷達能夠實現對障礙物后面目標的探測、定位、成像和追蹤。在應用層面主要包含建筑內部成像,探測、跟蹤運動目標。在軍事裝備、火災及地震救援等場景有著廣泛的應用前景和價值。
醫療領域:非接觸式UWB生命監測雷達不同于傳統的電極和傳感器接觸的檢測形式,可實現較遠距離無接觸式檢測患者的呼吸和心跳,可以在不影響患者正常休息的情況下,實現對患者的生命體征實時監測。
車載領域:UWB活體雷達通過活體微動作感知算法,實現車內生命體征的非接觸式存在性檢測,支持靜態呼吸檢測,有效防止兒童、寵物等無行為能力的乘客滯留車內。UWB腳踢雷達基于運動感知算法,實現車尾箱的非接觸式腳踢檢測。
測距定位功能解析
3.1測距原理
最簡單最直接的知道距離的方式便是獲取時間,距離 = 時間*速度。電磁波在空中的飛行時間ToF(Time of flight,飛行時間)可以認為是光速(299792458 m/s)。UWB作為一種高頻脈沖調制波可以為我們提供準確到皮秒級別的時間戳精度。那么我們可以簡單算一下,1ps的時間光傳播了多少米呢?29979245800*1E-12 = 0.02998cm。這個理論精度無疑是非常好的。當然實際精度不可能這么好,原因在于我們無法找到一個ps級別不出現誤差的晶振,那么在正常有源晶振的情況下,UWB的實際精度可以保證在10cm以內,10cm這個精度在現有的無線點對點測距領域已經遙遙領先于其它無線技術了。
雙向測距(TWR,Two Way Ranging)
雙向測距顧名思義就是通過兩邊的一收一發以及一發一收的相互配合下進行的測距,與比較常見的紅外測距不同,紅外測距就是典型的單向測距即為只用一個設備,發和收獲取到了位置,缺點也很明顯,必須有一個合適的反射點,雙向測距則解決了這個問題,雙方進行通訊后獲取到了距離信息,且是雙方都可以獲取到測距信息。
單邊雙向測距(SS-TWR,Single Side-TWR)
前文講解了測距的基本物理原理,這里我們就來講解一下UWB測距的最基礎的實現原理,單邊雙向測距。
SS-TWR原理,如下圖,Device A在其自己時鐘TA1 時刻發起測距,Device B在其自己時鐘TB1時刻收到了Device A發起的測距幀,即Tprop1 = (TB1-TA1 ) Device A 于Device B的距離就應該是Tprop *C(光速)。但是由于Device A 和Device B 時鐘不同步,所以無法確認Tprop1 的值。為了確定Tprop1 的值,Device B在收到Device A發起的測距幀后,固定延時Treply 的時間回復Device A,發射時間為TB2, Device A在TA2的時刻收到,即Tprop2 = (TA2-TB2),假設在這段時間,Device A設備Device B的位置沒有發生過改變。那么理論Tprop1 = Tprop2。為了確認Tprop的時間,在Device A的時間軸上,從發送時刻TA1 到收到Device B 回復幀的時刻TA2的耗時Troud = (TA2-TA1 ),在Device B的時間軸上,收到Device A 發起測距幀的時刻TB1到自己回復Device A 的時刻TB2的耗時Treply = (TB2-TB1 )。所以Tprop = (Troud - Treply)/2。即距離為Tprop *C。
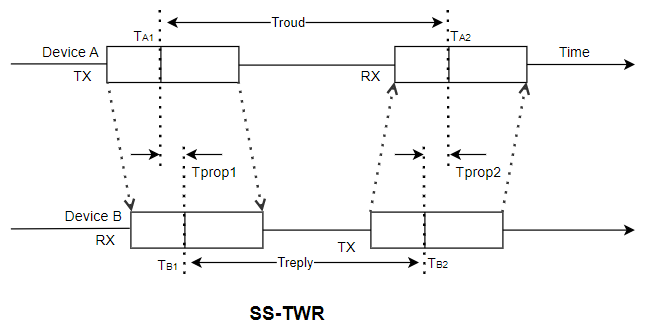
圖6 SS-TWR測距原理
舉個例子:
地球和火星的距離。來自地球的老王,打電話給在火星上的老馬并看了現在的時間1200(時分秒),老馬接到電話,時間是1800,過了一會兒,在1800老馬打了電話給老王,老王在1200接到電話。因為他們的頻率是一致都是以秒為單位(假設),通過這些數據可以計算信號在地球和火星間飛行的時間,往返的時間是13-5=8分鐘,(8分鐘/2)*C(光速)即為地球距離火星的距離。
雙邊雙向測距(DS-TWR,Double Side - TWR)
其實雙邊測距是從單邊測距擴展而來,主要是用于解決測距雙方時鐘精度不一致導致的誤差問題。
在SS-TWR的基礎上,由于設備自身時鐘,由于溫度以及設備精度誤差等原因導致的時鐘偏移,即Treply延時時間越長,從而導致計算距離時的誤差越大。為了減小以及消除這種誤差,DS-TWR增加反向測量補償,如下圖所示。使用兩個往返時間測量,降低Treply的延時帶來的誤差。
即

距離為Tprop *C。
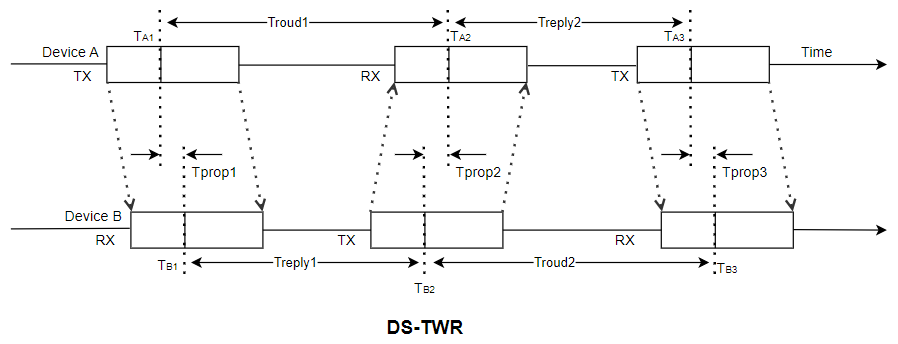
圖7 DS-TWR測距原理
3.2基于測距的定位方式(三邊定位)
基于測距的定位原理
我們已經獲知了距離,如果我們想進一步知道這個待定位對象(未知點)在這個空間的哪個地方或者在這個二維平面的哪個坐標點,就需要定位解算,從距離轉化為坐標點必須有三個已知點以及待定位對象(未知點)與這三點之間的距離,拿到這些數據后即可獲知待定位對象(未知點)的坐標點。基于測距的定位原理,其實從數學的角度分析,抽象后只有一種,就是畢達哥拉斯定理(Pythagorean Theorem)。這位古希臘數學家用代數的方式來描述平面幾何,畢達哥拉斯定理其實在中國有一個更廣為人知的名字即“勾股定理”。
三邊定位解算
對于距離推算坐標,最簡單的方式就是畫圓,在理想情況下(三個圓均相交),三個圓會相交于一點,公式如下:
已知三點位置 (x1, y1), (x2, y2), (x3, y3)
已知未知點 (x0, y0) 到三點距離 d1, d2, d3
以 d1, d2, d3 為半徑作三個圓,根據畢達哥拉斯定理,得出交點即未知點的位置計算公式:

但是對于距離計算,是不存在絕對理想的情況的,很大概率是三個圓相交甚至相離的情況下,計算出估計出一個近似值。
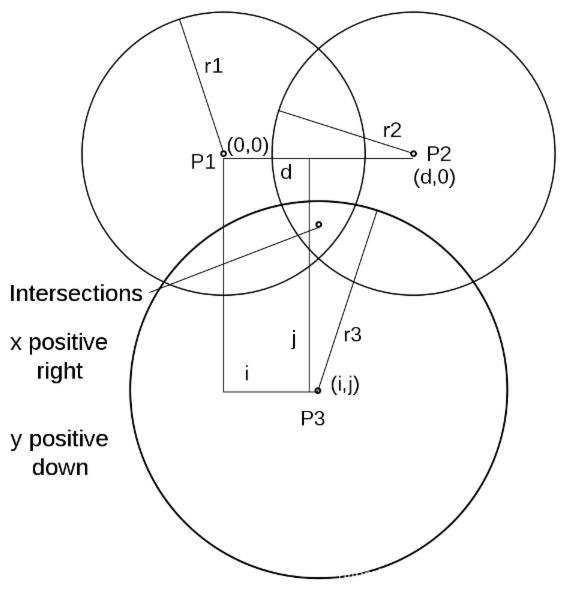
圖8 三角定位原理
設未知點位置為 (x, y), 令其中的第一個球形 P1 的球心坐標為 (0, 0),P2 處于相同縱坐標,球心坐標為 (d, 0),P3 球心坐標為 (i, j),三個球形半徑分別為 r1, r2, r3,z為三球形相交點與水平面高度。則有:

當 z = 0 時, 即為三個圓在水平面上相交為一點,首先解出 x:

將公式二變形,將公式一的 z^2 代入公式二,再代入公式三得到 y 的計算公式:

當然以上只是一個基本的公式推導,有助于大家進行理解,但是實際使用時我們不可能去不斷進行坐標的轉化然后解算,這樣的處理過于浪費時間,代碼也是很難實現。這時我們只需要引入線性代數將矩陣運算帶入其中就可以簡單快速的得到通用解答式。

基本公式組保持不變
進行拆解銷項

經過線性代數矩陣的分割后

若我們令

為A矩陣

為B矩陣
那么待求未知點坐標(X,Y)為

至此這個求坐標問題就變為如何求A矩陣的逆矩陣,這里推薦簡單好用的高斯逆矩陣,據說某些DSP芯片也可以直接求出逆矩陣,不管怎么樣這種方式會帶來更高的通用性與算法速率。
當然以上均為理想情況,但是實際使用時肯定會有各類誤差影響導致這個圓不相切,有可能相交也有可能相離,這時候就應該再次用一種噪聲消除的算法來進行處理以將數據運算到較為貼合現實值的坐標點上。
3.3基于到達時間差的定位方式(TDOA)
TDOA
TDOA(Time Difference Of Arrival,到達時間差),是基于各參考基站(以下簡稱Anc)與待定位對象(以下簡稱Tag)之間的距離之差通過求解非線性雙曲方程組來推斷待定位對象相對于各參考基站的相對位置的定位方法。當基站之間的時間是完全同步的情況下,且晶振在一段時間內的誤差極小(ppm的值極小),那么時間差值就是距離差值,原因是電磁波的傳播速度是固定的。當Tag端發射一個信號到達幾個Anc端后,只需要測量Tag發出的信號到達各Anc的到達時間之差即可得到對應的距離之差。
雙曲定位解算
使用TDOA的前提就是各個基站有一個很精準的時間同步,這樣才能保證Tag端發送出來的時間到達各個基站后有一個很高精度的時間差值。那么時間差值又如何轉化為距離差值后又轉化為坐標點呢?如果說測距后的三邊定位是來解三個圓的相切問題,那么TDOA就是來解非線性雙曲方程組。在TDOA定位系統中,進行定位解算時,首先需要根據到達時間差建立雙曲線方程組:
Tag坐標:(X,Y)
各Anc坐標:(Xi,Xi),i = 1,2,3
各Anc到Tag的距離記為:

各Anc與A1到Tag的距離差記為:

那么這時候方程組的建立如下

求解非線性方程組的第一步通常都是要做線性化處理。
一種常見的線性化處理是進行泰勒級數展開并保留前兩項,這里就不詳細展開說明了,整體求解的圖示如下:
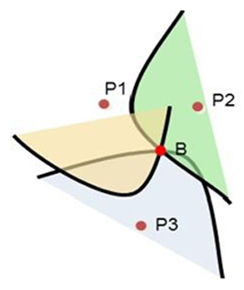
圖9 雙曲定位原理
3.4基于相位差的定位方式(AOA/PDOA)
AOA
AOA(Angle of Arrival,到達角度測距),是基于信號到達角度的定位算法是一種典型的基于測距的定位算法,通過某些硬件設備感知發射節點信號的到達方向,計算接收節點與錨節點之間的相對方位或角度,然后再利用三角測量法或其他方式計算出未知節點的位置。
PDOA
PDOA(Phase Diference of Arrival,信號到達相位差),是通過測量相位差求出信號往返的傳播時間來計算往返距離。本質上PDOA是AOA定位算法的一種延申。
相位差定位解算




其中α代表兩根天線接收的信號中的First-Path 的到達相位之差(Phase Difference of Arrival),這也是PDOA 名字的來由。
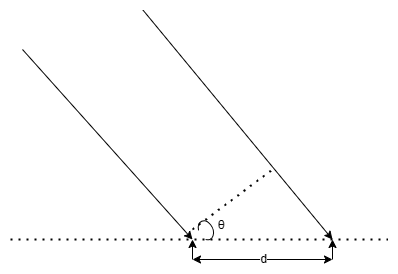
圖10 相位差定位原理
關于信馳達
深圳市信馳達科技有限公司(RF-star)是一家專注于物聯網射頻通信方案的高新技術企業,車聯網聯盟(CCC)和智慧車聯產業生態聯盟(ICCE)會員,通過ISO9001和IATF16949質量體系認證。2010年成立之初即成為美國TI公司官方授權方案商,之后陸續得到Silicon Labs、Nordic、Realtek、Espressif、ASR、卓勝微等海內外知名芯片企業的認可和支持。公司提供物聯網無線模塊和應用方案,包括BLE、Wi-Fi、UWB、Zigbee、Thread、Matter、Sub-1G、Wi-SUN、LoRa等。
審核編輯:湯梓紅
-
數據傳輸
+關注
關注
9文章
2020瀏覽量
66102 -
信號
+關注
關注
11文章
2854瀏覽量
78320 -
UWB
+關注
關注
32文章
1177瀏覽量
62790 -
超寬帶
+關注
關注
1文章
216瀏覽量
23975
原文標題:數字鑰匙關鍵技術:UWB(超寬帶)實現原理一文講透
文章出處:【微信號:szrfstar,微信公眾號:信馳達科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
LVDS高速數據傳輸設計及其在SAR處理機中的應用
基于PCI總線的成像光譜數據傳輸系統的設計
雷達情報網格數據傳輸服務的研究與實現
基于PCI總線設計干涉成像光譜數據傳輸卡
合成孔徑雷達成像處理器數據傳輸與互連技術
數字數據傳輸(DDN),數字數據傳輸(DDN)的工作原理是什
使用流媒體技術的氣象雷達數據傳輸算法

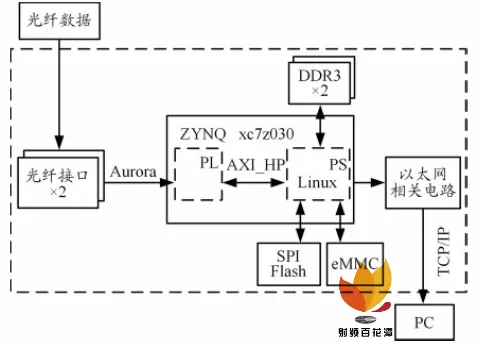
光纖接口轉為以太網接口數據傳輸系統的實現方法
無線數據傳輸模塊的功能特點
數字鑰匙關鍵技術:UWB(超寬帶)實現原理一文講透





 工商網監
工商網監
評論