") L298N引腳定義及功能
L298N引腳定義及功能
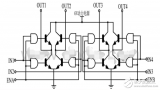
一.L298N芯片
L298是15腳Multiwatt封裝的L298N,內(nèi)部包含4通道邏輯驅(qū)動(dòng)電路;是一種二相和四相電機(jī)的專用驅(qū)動(dòng)器,即內(nèi)含二個(gè)H橋的高電壓大電流雙全橋驅(qū)動(dòng)器,接收標(biāo)準(zhǔn)TTL邏輯電平信號(hào),可驅(qū)動(dòng)46V、2A以下的電機(jī)。
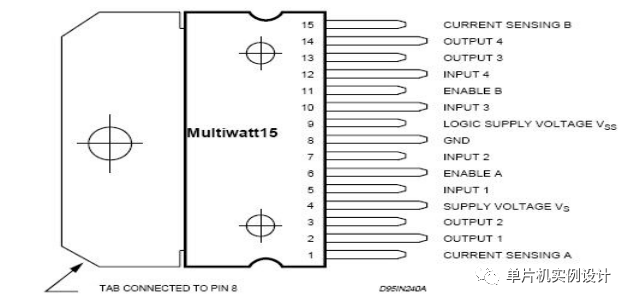
L298N引腳定義:
- Pin9: Vss,即邏輯電路供電電壓。電壓輸入范圍為4.5~7V。
- Pin4: Vs,即驅(qū)動(dòng)電路輸入電壓。Vss電壓要求輸入最小電壓為4.5V,最大可達(dá)36V;Vs電壓最大值也是36V;
- Pin2,3,13,14: 為L(zhǎng)298N芯片輸入到電動(dòng)機(jī)的輸出端,其中引腳2、3或引腳13、14能分別獨(dú)立控制一個(gè)直流電機(jī)。引腳2、3、13、14組合可控制一個(gè)兩相步進(jìn)電機(jī)。
- Pin6,11: 為電動(dòng)機(jī)的使能接線腳;即Pin6引腳為高電平,Pin2、3有效;同理,Pin11引腳為高電平,Pin13、14有效;
- Pin5,7,10,12: 為單片機(jī)輸入到L298N芯片的輸入引腳。
二、L298N模塊
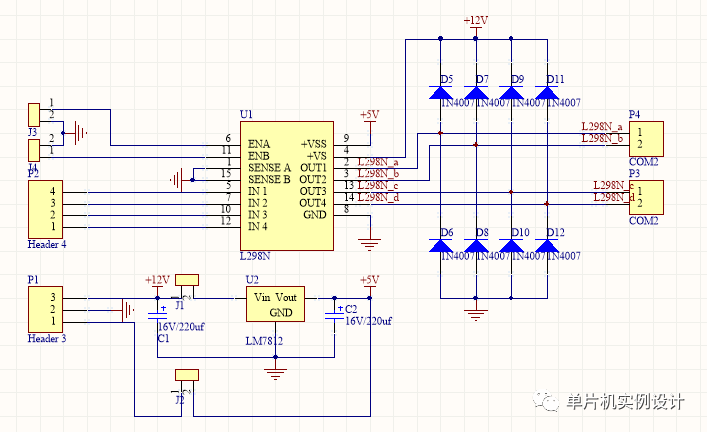
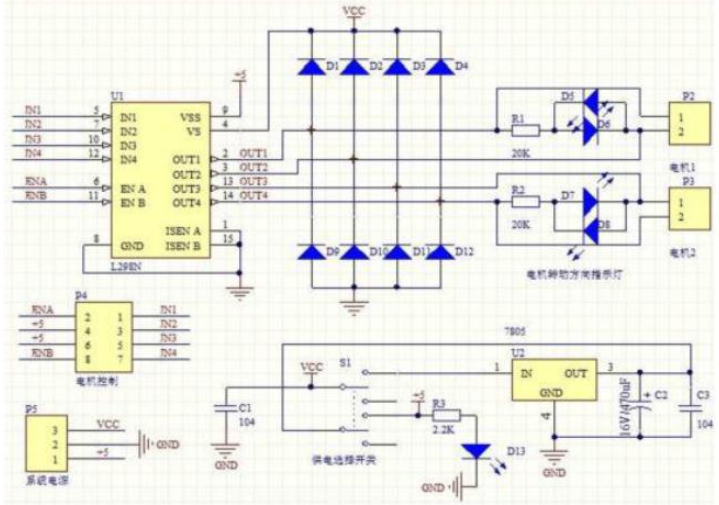
L298N模塊原理圖如下:
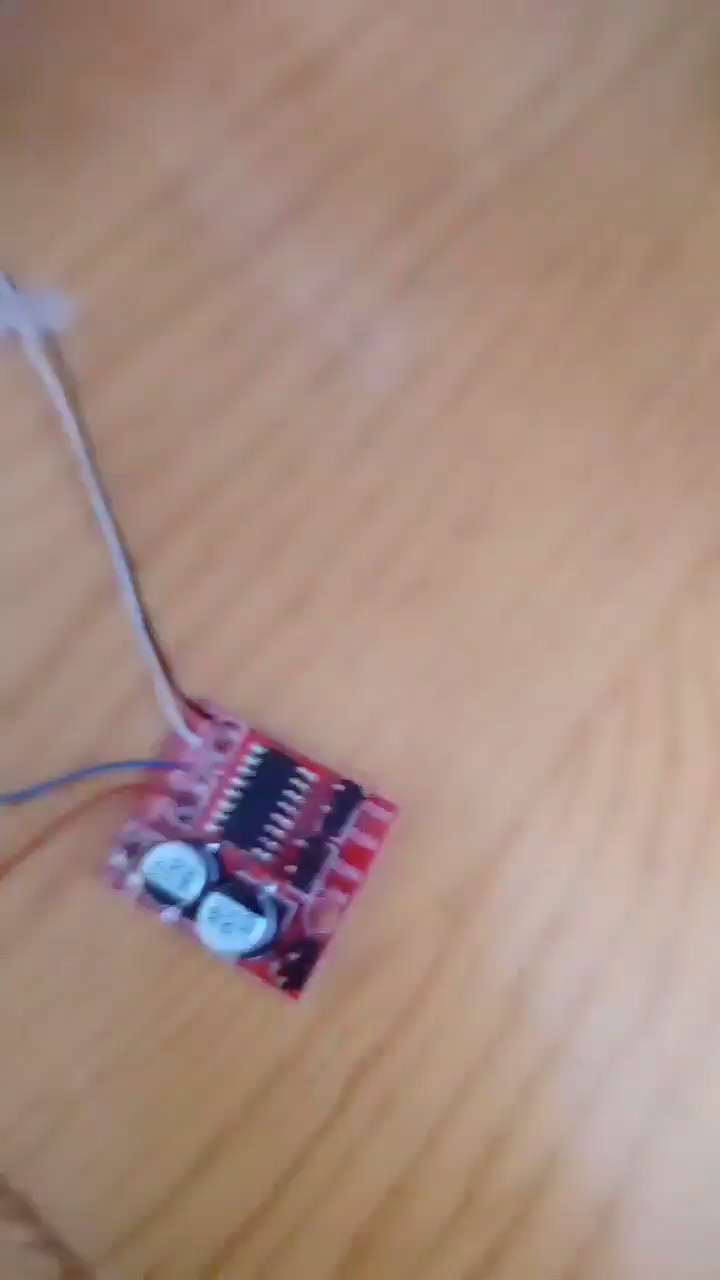
L298N模塊實(shí)物如下圖 :
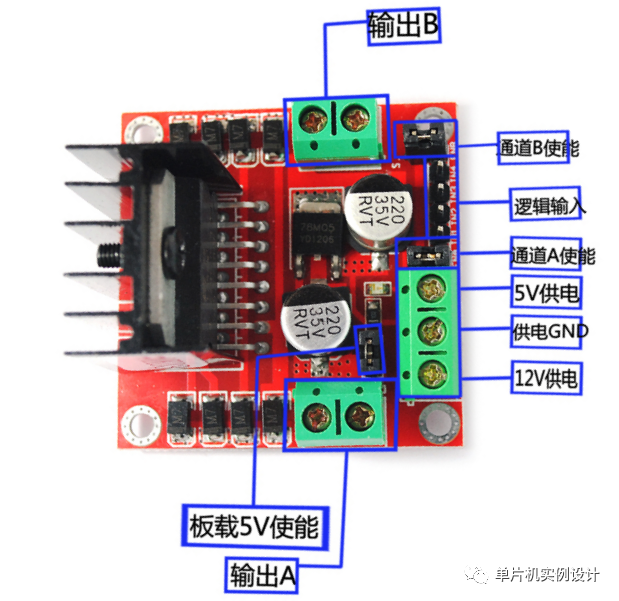
- 輸出A、輸出B為L(zhǎng)298N的引腳2、3、13、14,用于接一個(gè)步進(jìn)電機(jī)或者兩個(gè)直流電機(jī);
- 通道A使能、通道B使能為H橋使能引腳,高電平有效;使用時(shí)默認(rèn)安裝跳帽(高電平)。
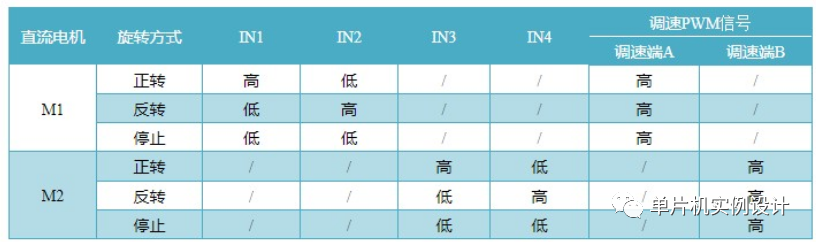
- 邏輯輸入為引腳5、7、10、12 ,即H橋A、B的邏輯控制引腳;通道A使能、通道B使能接+5V 時(shí),引腳5、7、10、12的組合可以控制電機(jī)的正轉(zhuǎn)、反轉(zhuǎn)和停止。當(dāng)L298N接直流電機(jī)時(shí),控制如下:
- 5V供電、12V供電、供電GND :當(dāng)你的驅(qū)動(dòng)電壓(上圖標(biāo)識(shí)為12V輸入,實(shí)際可以接受的輸入范圍是7-12V)為7V-12V的時(shí)候,可以使能板載的5V邏輯供電,當(dāng)使用板載5V供電之后,接口中的+5V供電不要輸入電壓,但是可以引出5V電壓供外部使用。
當(dāng)驅(qū)動(dòng)電壓高于12V,小于等于24V(芯片手冊(cè)中提出可以支持到35V,但是按照經(jīng)驗(yàn)一般298保守應(yīng)用最大電壓支持到24V已經(jīng)很了不起!)時(shí),比如要驅(qū)動(dòng)額定電壓為18V的電機(jī)。首先必須拔除板載5V輸出使能的跳線帽。然后在5V輸出端口外部接入5V。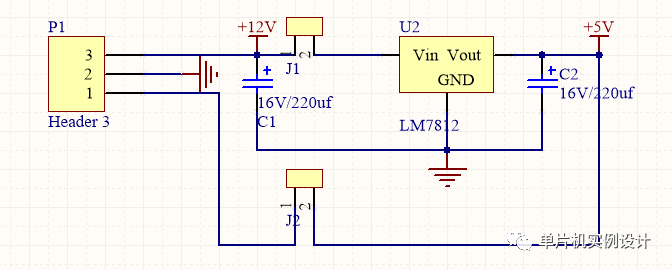
模塊內(nèi)部5V穩(wěn)壓電路 - 板載5V使能 :即 一個(gè)電平為5V的控制信號(hào),當(dāng)此信號(hào)輸入有效時(shí),且電機(jī)驅(qū)動(dòng)模塊中電源供電正常時(shí),電機(jī)驅(qū)動(dòng)模塊輸出電流。否則即使電源供電正常,電機(jī)上也無(wú)電流。
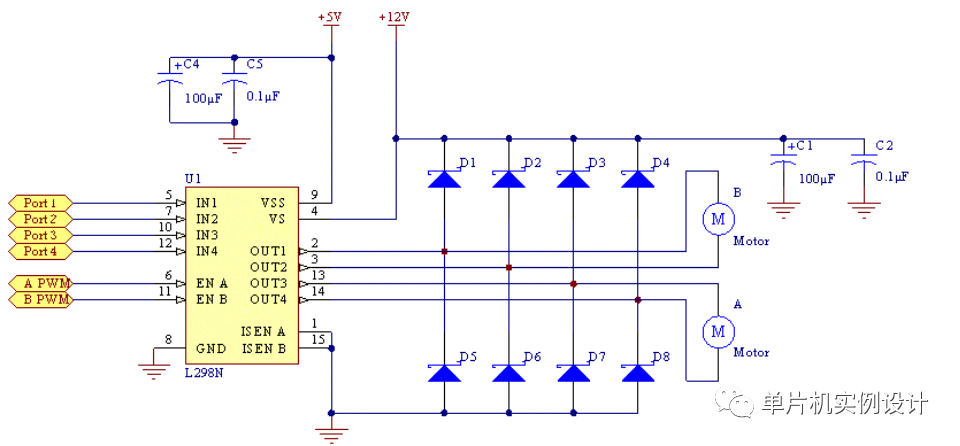
四.L298N控制兩路直流電機(jī)
用L298驅(qū)動(dòng)兩臺(tái)直流減速電機(jī)的電路。引腳6,9可用于PWM控制。如果機(jī)器人項(xiàng)目只要求直行前進(jìn),則可將5,10和7,12兩對(duì)引腳分別接高電平和低電平,僅用單片機(jī)的兩個(gè)端口給出PWM信號(hào)控制6,11即可實(shí)現(xiàn)直行、轉(zhuǎn)彎、加減速等動(dòng)作。
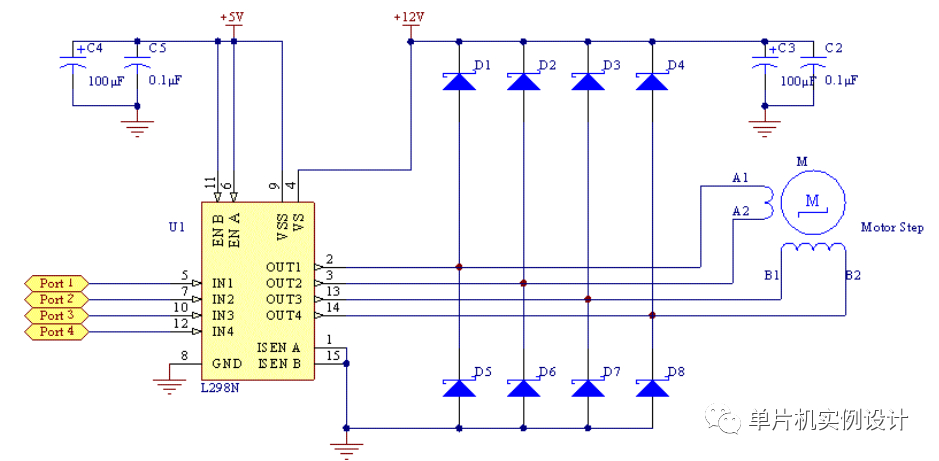
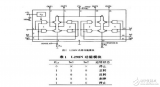
五.L298N控制兩相四線步進(jìn)電機(jī)
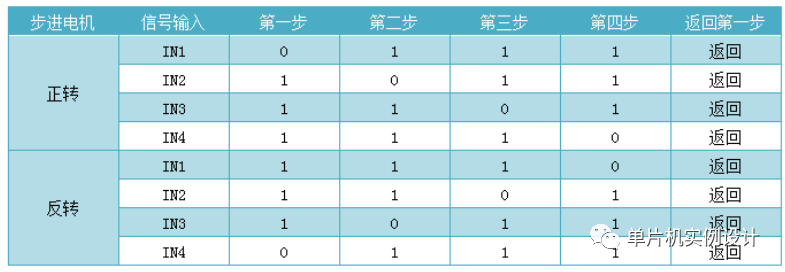
采用步進(jìn)電機(jī)的驅(qū)動(dòng)方式,可將引腳6,11(ENA、ENB)接至+5V。單片機(jī)控制IN1/2/3/4引腳,按照特定的步進(jìn)節(jié)拍,就能使步進(jìn)電機(jī)步進(jìn)轉(zhuǎn)動(dòng)。
L298N步進(jìn)指令如下:
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
直流電機(jī)
+關(guān)注
關(guān)注
36文章
1733瀏覽量
71523 -
引腳
+關(guān)注
關(guān)注
16文章
1635瀏覽量
52508 -
L298N
+關(guān)注
關(guān)注
21文章
224瀏覽量
79464 -
電平信號(hào)
+關(guān)注
關(guān)注
3文章
27瀏覽量
9262
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
基于L298N電機(jī)驅(qū)動(dòng)模塊的原理及使用案例
最近因?yàn)榻佑|了L298N模塊,發(fā)現(xiàn)網(wǎng)絡(luò)上的教程太多有點(diǎn)亂,就自己總結(jié)了一下關(guān)于L298N電機(jī)驅(qū)動(dòng)模塊的一些原理和使用方法。
L298N驅(qū)動(dòng)電機(jī)的問(wèn)題求教
一個(gè)小車:一個(gè)直流減速電機(jī)控制兩個(gè)前輪,一個(gè)舵機(jī)一個(gè)電機(jī)控制兩個(gè)后輪,所以前后兩輪的轉(zhuǎn)速與方向相同,能否用L298N的一個(gè)電機(jī)引腳同時(shí)控制兩個(gè)驅(qū)動(dòng)電機(jī)(并聯(lián)),然后另一個(gè)電機(jī)引腳控制舵機(jī)L29
發(fā)表于 02-08 16:39
什么是L298N驅(qū)動(dòng)板?L298N驅(qū)動(dòng)板的驅(qū)動(dòng)原理是什么?
什么是L298N驅(qū)動(dòng)板?L298N驅(qū)動(dòng)板的驅(qū)動(dòng)原理是什么?L298N驅(qū)動(dòng)板的參考程序是什么?
發(fā)表于 06-29 09:09
介紹L298N模塊
L298N電機(jī)驅(qū)動(dòng)的使用前言一、介紹L298N模塊簡(jiǎn)介接口介紹二、使用步驟硬件連接軟件部分1.聲明部分2.代碼部分總結(jié)前言博主為某大學(xué)電氣專業(yè)大學(xué)生,以學(xué)習(xí)為目的寫下該文,內(nèi)容主要為以51單片機(jī)為例
發(fā)表于 08-31 08:46
L298N電機(jī)驅(qū)動(dòng)模塊指導(dǎo)書
L298N電機(jī)驅(qū)動(dòng)模塊指導(dǎo)書 介紹L298n的使用方法
發(fā)表于 05-23 17:03
?61次下載
l298n引腳圖和說(shuō)明
L298N該型號(hào)價(jià)格今年大部分時(shí)間比較平穩(wěn),只有一兩個(gè)月價(jià)格波動(dòng)幅度偏大,但持續(xù)時(shí)間很短。L298N 是一種雙H橋電機(jī)驅(qū)動(dòng)芯片,其中每個(gè)H橋可以提供2A的電流,功率部分的供電電壓范圍是2.5-48v,邏輯部分5v供電,接受5vTTL電平
發(fā)表于 11-07 15:13
?12.6w次閱讀
L298N中文資料匯總_L298N引腳圖及功能_工作原理_特性參數(shù)及典型驅(qū)動(dòng)電路
主要介紹L298N中文資料匯總_L298N引腳圖及功能_工作原理_特性參數(shù)及典型驅(qū)動(dòng)電路。L298N是專用驅(qū)動(dòng)集成電路,屬于H橋集成電路。
發(fā)表于 12-11 16:48
?58.8w次閱讀
繼電器模塊和L298N電機(jī)驅(qū)動(dòng)模塊的使用
單片機(jī)如何與L298N和繼電器連接?什么時(shí)候選擇L298N或繼電器模塊?L298N模塊主控芯片為L298N的雙H橋電機(jī)驅(qū)動(dòng)模塊,驅(qū)動(dòng)電壓為5~35V,一般驅(qū)動(dòng)直流電機(jī)正反轉(zhuǎn)一般使用
發(fā)表于 11-10 10:50
?19次下載

L298N電機(jī)驅(qū)動(dòng)的使用
L298N電機(jī)驅(qū)動(dòng)的使用前言一、介紹L298N模塊簡(jiǎn)介接口介紹二、使用步驟硬件連接軟件部分1.聲明部分2.代碼部分總結(jié)前言博主為某大學(xué)電氣專業(yè)大學(xué)生,以學(xué)習(xí)為目的寫下該文,內(nèi)容主要為以51單片機(jī)為例
發(fā)表于 11-23 17:06
?72次下載
Arduino實(shí)驗(yàn)17 L298N電機(jī)驅(qū)動(dòng)模塊
一、實(shí)驗(yàn)?zāi)康?
(1)熟悉L298N電機(jī)驅(qū)動(dòng)模塊原理與功能;
(2)掌握L298N驅(qū)動(dòng)電機(jī)的程序控制方法;
(3)熟悉PS2雙軸搖桿傳感器模塊的原理與功能;
(4)編寫
發(fā)表于 03-16 14:14
?12次下載
L298N芯片產(chǎn)品功能簡(jiǎn)介
電子發(fā)燒友網(wǎng)站提供《L298N芯片產(chǎn)品功能簡(jiǎn)介.zip》資料免費(fèi)下載
發(fā)表于 10-18 09:40
?2次下載





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論