") 基于英特爾開(kāi)發(fā)套件使用ORB-SLAM3實(shí)現(xiàn)無(wú)人機(jī)實(shí)時(shí)定位
基于英特爾開(kāi)發(fā)套件使用ORB-SLAM3實(shí)現(xiàn)無(wú)人機(jī)實(shí)時(shí)定位
作者:上海大風(fēng)技術(shù)有限公司 余力
01大風(fēng)無(wú)人機(jī)簡(jiǎn)介
大風(fēng)無(wú)人機(jī)是上海大風(fēng)技術(shù)有限公司自主研發(fā)的橋梁巡檢無(wú)人機(jī),旨在為客戶(hù)提供:
一站式的無(wú)人機(jī)橋檢解決方案,克服無(wú) GPS 信號(hào)時(shí)的無(wú)人機(jī)定位精度問(wèn)題
高分辨率且準(zhǔn)確的橋梁與城市建模
目前大風(fēng)無(wú)人機(jī)已為多位客戶(hù)提供高分辨率模型,包括橋梁、建筑物、道路等,為無(wú)人機(jī)在工業(yè)細(xì)分領(lǐng)域的應(yīng)用提供優(yōu)質(zhì)方案。
02雙目視覺(jué)與 IMU 融合 SLAM 技術(shù)簡(jiǎn)介
工業(yè)建模對(duì)于精度有著高要求,這意味著無(wú)人機(jī)的 SLAM 算法要提供可靠的實(shí)時(shí)位姿估計(jì)。ORB-SLAM3 是目前融合雙目視覺(jué)與 IMU 的優(yōu)秀算法,其前端是針對(duì)實(shí)時(shí)性?xún)?yōu)化的 ORB 描述子與關(guān)鍵幀的提取算法,后端是局部地圖的維護(hù)、閉環(huán)矯正與全局地圖的更新。在 TUM 數(shù)據(jù)集測(cè)試中,其最高精度可達(dá) 1cm。我司基于該框架研發(fā)算法,實(shí)現(xiàn)雙目視覺(jué)與 IMU 數(shù)據(jù)的融合,精準(zhǔn)計(jì)算位移距離并給出可靠的實(shí)時(shí)位姿,使得無(wú)人機(jī)在無(wú) GPS 的情況下進(jìn)行實(shí)時(shí)定位成為可能,并能被應(yīng)用于各種無(wú) GPS 場(chǎng)景下的自主飛行與建模。
ORB-SLAM3 在上一代的基礎(chǔ)上優(yōu)化了以下方面:
融合視覺(jué)信息和 IMU 數(shù)據(jù),提高了位姿估計(jì)的穩(wěn)定性與精度
對(duì)閉環(huán)檢測(cè)增加了關(guān)鍵幀時(shí)序連續(xù)性要求,保證了閉環(huán)的精度
設(shè)置了活躍與非活躍地圖,支持多地圖的建立與融合
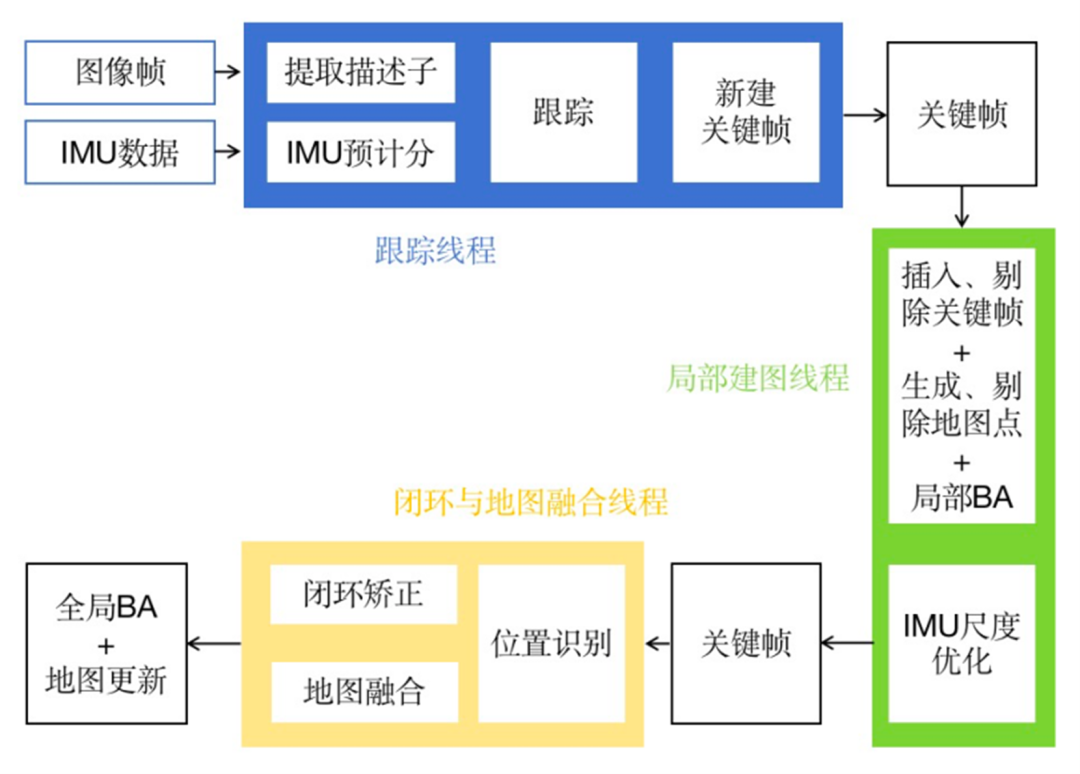
圖 . SLAM 算法框架圖
03使用英特爾 CPU 作為機(jī)載算力核心的優(yōu)勢(shì)
大風(fēng)無(wú)人機(jī)使用英特爾 CPU 作為機(jī)載算力核心,是因?yàn)?x86 + Linux 的軟件生態(tài)非常強(qiáng)大,支持多種市場(chǎng)上已有的軟件和硬件組件,易于快速構(gòu)建軟件系統(tǒng),提升開(kāi)發(fā)效率,同時(shí)還有強(qiáng)大的可擴(kuò)展性和可維護(hù)性。
本文將介紹在英特爾 CPU 下運(yùn)行 SLAM 算法的結(jié)果。
04SLAM 算法運(yùn)行平臺(tái)
機(jī)載電腦硬件:英特爾開(kāi)發(fā)套件愛(ài)克斯開(kāi)發(fā)板 AIxBoard
機(jī)載電腦系統(tǒng):Ubuntu20.04.1
傳感器:RealSense D435i
05SLAM 算法運(yùn)行結(jié)果
在無(wú)人機(jī)巡檢建模中,SLAM 算法需要提供可靠的位姿估計(jì)以知曉機(jī)體的位移和在地圖中的位置,這需要跟蹤線(xiàn)程盡可能快地處理傳感器數(shù)據(jù),即消息幀的處理頻率要盡可能高。在本次測(cè)試中,我們?cè)?AIxBoard 上運(yùn)行了 SLAM 算法,在雙目相機(jī)以約 30 Hz 的頻率拍攝的情況下,追蹤線(xiàn)程的平均處理速度能達(dá)到 29.69 Hz,說(shuō)明可以程序可以穩(wěn)定地處理所有到來(lái)的雙目圖像。
06總結(jié)與展望
我們?cè)?AIxBoard 下使用雙目視覺(jué)與 IMU 融合的 SLAM 算法,使無(wú)人機(jī)具備輸出可靠位姿并準(zhǔn)確移動(dòng)規(guī)定距離的能力,為后續(xù)建立高分辨率與高精度模型提供可靠數(shù)據(jù)。
未來(lái),大風(fēng)無(wú)人機(jī)將支持更高性能的英特爾 CPU,實(shí)現(xiàn)在無(wú) GPS 信號(hào)的場(chǎng)景中自主執(zhí)行任務(wù)的目標(biāo)。
公司簡(jiǎn)介
上海大風(fēng)技術(shù)有限公司成立于 2019 年。致力于成為領(lǐng)先的無(wú)人機(jī)智能應(yīng)用專(zhuān)家,專(zhuān)注于無(wú)人機(jī)在全新領(lǐng)域的探索與創(chuàng)新。
憑借自主研發(fā)的軟硬件產(chǎn)品,為交通、物流、電力、建筑、應(yīng)急、消防等行業(yè)提供革命性的整體解決方案。成立至今已取得各種發(fā)明專(zhuān)利、軟件著作權(quán) 20 余項(xiàng)。
審核編輯:湯梓紅
-
英特爾
+關(guān)注
關(guān)注
61文章
10177瀏覽量
174061 -
gps
+關(guān)注
關(guān)注
22文章
2970瀏覽量
168598 -
無(wú)人機(jī)
+關(guān)注
關(guān)注
230文章
10759瀏覽量
185758 -
開(kāi)發(fā)套件
+關(guān)注
關(guān)注
2文章
169瀏覽量
24619
原文標(biāo)題:基于英特爾開(kāi)發(fā)套件使用 ORB-SLAM3 實(shí)現(xiàn)無(wú)人機(jī)實(shí)時(shí)定位 | 開(kāi)發(fā)者實(shí)戰(zhàn)
文章出處:【微信號(hào):英特爾物聯(lián)網(wǎng),微信公眾號(hào):英特爾物聯(lián)網(wǎng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
英特爾推無(wú)人機(jī)新玩法:取代煙花
無(wú)人機(jī)掀風(fēng)潮 英特爾擴(kuò)展實(shí)力
英特爾BOOT Loader開(kāi)發(fā)套件-高級(jí)嵌入式開(kāi)發(fā)基礎(chǔ)

無(wú)人機(jī)市場(chǎng)風(fēng)起云涌 英特爾一路高歌勢(shì)如破竹
英特爾推無(wú)人機(jī)開(kāi)發(fā)套件 內(nèi)置視覺(jué)系統(tǒng)
關(guān)于英特爾CES無(wú)人機(jī)的相關(guān)內(nèi)容
大牛!英特爾發(fā)布面向開(kāi)發(fā)者的全新無(wú)人機(jī)產(chǎn)品
英特爾強(qiáng)推RealSense技術(shù)在無(wú)人機(jī)領(lǐng)域應(yīng)用
英特爾的商用無(wú)人機(jī)一直引領(lǐng)著無(wú)人機(jī)領(lǐng)域
英特爾?Shooting Star?無(wú)人機(jī)首登雜志封面
用于無(wú)人機(jī)的英特爾Aero計(jì)算板和視覺(jué)配件套件簡(jiǎn)介
使用英特爾物聯(lián)網(wǎng)商業(yè)開(kāi)發(fā)套件改變世界
ORB-SLAM3整體流程詳解






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論