 【XR806開發板試用】使用編碼器進行調光
【XR806開發板試用】使用編碼器進行調光
之前做過一個LED調光的項目,這次想拿XR806來實現,后續打算加入遠程控制的功能。這個項目使用旋轉編碼器來調節LED的亮度,基本原理是MCU識別編碼器的旋轉方向和步數,調節PWM輸出占空比,從而實現亮度調節。
識別其旋轉方向和步數,要考慮消除抖動,否則會出現識別錯誤,導致系統不穩定,這和按鍵是類似的。
Github上有對應的Arduino庫,注意它的開源協議是GNU GPL V3!本人曾經移植到STM32,現已移植到XR806,效果良好。旋轉編碼器相關代碼如下:
頭文件re.h源碼:
/*
* Rotary encoder library for Arduino.
* Port to XR806 by Zixun Chen.
*/
#ifndef _ROTARY_ENCODER_H_
#define _ROTARY_ENCODER_H_
#ifdef __cplusplus
extern "C" {
#endif
#include "main.h"
// 根據編碼器的輸出類型來選擇是否定義RE_HALF_STEP
#define RE_HALF_STEP
// 旋轉編碼器通常外接上拉電阻,對應空閑電平是00B。如果外接電阻是下拉的,需要定義RE_PINS_PULL_DOWN
// #define RE_PINS_PULL_DOWN
#define DIR_NONE 0 // 尚無完整有效的步進
#define DIR_CW 0x10 // 順時針步進
#define DIR_CCW 0x20 // 逆時針步進
typedef struct {
// 定義編碼器A端所連的GPIO引腳
GPIO_Port GPIO_A;
GPIO_Pin PIN_A;
// 定義編碼器B端所連的GPIO引腳
GPIO_Port GPIO_B;
GPIO_Pin PIN_B;
uint8_t RetVal; // 保存返回值
uint8_t State; // 內部變量,保存狀態機狀態
} REHandle_t;
void RotaryEncoderInit(REHandle_t *REVal); // 初始化
void RotaryEncoderProcess(REHandle_t *REVal); // 讀取步進
#ifdef __cplusplus
}
#endif
#endif // _ROTARY_ENCODER_H_
源文件re.c:
/* Rotary encoder handler for arduino.
*
* Copyright 2011 Ben Buxton. Licenced under the GNU GPL Version 3.
* Contact: bb@cactii.net
*
* Port to XR806 by Zixun Chen.
*/
#include "re.h"
/*
* The below state table has, for each state (row), the new state
* to set based on the next encoder output. From left to right in,
* the table, the encoder outputs are 00, 01, 10, 11, and the value
* in that position is the new state to set.
*/
#define R_START 0x0
#ifdef RE_HALF_STEP
// Use the half-step state table (emits a code at 00 and 11)
#define R_CCW_BEGIN 0x1
#define R_CW_BEGIN 0x2
#define R_START_M 0x3
#define R_CW_BEGIN_M 0x4
#define R_CCW_BEGIN_M 0x5
const unsigned char ttable[6][4] = {
// R_START (00)
{R_START_M, R_CW_BEGIN, R_CCW_BEGIN, R_START},
// R_CCW_BEGIN
{R_START_M | DIR_CCW, R_START, R_CCW_BEGIN, R_START},
// R_CW_BEGIN
{R_START_M | DIR_CW, R_CW_BEGIN, R_START, R_START},
// R_START_M (11)
{R_START_M, R_CCW_BEGIN_M, R_CW_BEGIN_M, R_START},
// R_CW_BEGIN_M
{R_START_M, R_START_M, R_CW_BEGIN_M, R_START | DIR_CW},
// R_CCW_BEGIN_M
{R_START_M, R_CCW_BEGIN_M, R_START_M, R_START | DIR_CCW},
};
#else
// Use the full-step state table (emits a code at 00 only)
#define R_CW_FINAL 0x1
#define R_CW_BEGIN 0x2
#define R_CW_NEXT 0x3
#define R_CCW_BEGIN 0x4
#define R_CCW_FINAL 0x5
#define R_CCW_NEXT 0x6
const unsigned char ttable[7][4] = {
// R_START
{R_START, R_CW_BEGIN, R_CCW_BEGIN, R_START},
// R_CW_FINAL
{R_CW_NEXT, R_START, R_CW_FINAL, R_START | DIR_CW},
// R_CW_BEGIN
{R_CW_NEXT, R_CW_BEGIN, R_START, R_START},
// R_CW_NEXT
{R_CW_NEXT, R_CW_BEGIN, R_CW_FINAL, R_START},
// R_CCW_BEGIN
{R_CCW_NEXT, R_START, R_CCW_BEGIN, R_START},
// R_CCW_FINAL
{R_CCW_NEXT, R_CCW_FINAL, R_START, R_START | DIR_CCW},
// R_CCW_NEXT
{R_CCW_NEXT, R_CCW_FINAL, R_CCW_BEGIN, R_START},
};
#endif
static uint8_t ReadPinLevel(GPIO_Port GPIOx, GPIO_Pin PINy); // 內部函數,讀取引腳電平
void RotaryEncoderInit(REHandle_t *REVal) {
GPIO_InitParam GPIO_InitVal={0};
// 初始化GPIO引腳
GPIO_InitVal.driving=GPIO_DRIVING_LEVEL_1;
GPIO_InitVal.mode=GPIOx_Pn_F0_INPUT;
GPIO_InitVal.pull=GPIO_PULL_NONE;
HAL_GPIO_Init(REVal- >GPIO_A, REVal- >PIN_A, &GPIO_InitVal);
HAL_GPIO_Init(REVal- >GPIO_B, REVal- >PIN_B, &GPIO_InitVal);
// 初始化狀態機
REVal- >State=R_START;
}
void RotaryEncoderProcess(REHandle_t *REVal) {
uint8_t pinstate;
// 讀取AB端電平
pinstate=(ReadPinLevel(REVal- >GPIO_B, REVal- >PIN_B)< 1) |
ReadPinLevel(REVal- >GPIO_A, REVal- >PIN_A);
// 狀態機操作
REVal- >State=ttable[REVal- >State & 0xf][pinstate];
// 返回編碼器步進信息
REVal- >RetVal=REVal- >State & 0x30;
}
static uint8_t ReadPinLevel(GPIO_Port GPIOx, GPIO_Pin PINy)
{
GPIO_PinState RDPin;
RDPin=HAL_GPIO_ReadPin(GPIOx, PINy);
#ifdef RE_PINS_PULL_DOWN
// 如果定義RE_PINS_PULL_DOWN,需要反轉引腳電平
if(GPIO_PIN_HIGH==RDPin) {
return 0;
} else {
return 1;
}
#else // RE_PINS_PULL_DOWN
if(GPIO_PIN_HIGH==RDPin) {
return 1;
} else {
return 0;
}
#endif // RE_PINS_PULL_DOWN
}
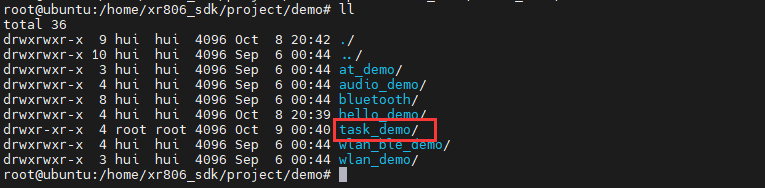
編碼器A端和B端分別連接PA12和PA13,使用板載LED即可,引腳是PA21,對應PWM_CH2。開發環境基于FreeRTOS,XR806 SDK在 ~/tools/目錄下。在 ~/tools/xr806_sdk/project/demo/ 目錄下新建 tryre 文件夾,并在其中添加源代碼,makefile等文件,然后按照教程編譯鏈接下載即可。主要代碼如下:
頭文件main.h:
#ifndef __MAIN_H
#define __MAIN_H
#ifdef __cplusplus
extern "C" {
#endif
// 需要包含的頭文件
#include < stdio.h >
#include "driver/chip/hal_gpio.h"
#include "driver/chip/hal_pwm.h"
#include "re.h"
#include "FreeRTOS.h"
#include "task.h"
#ifdef __cplusplus
}
#endif
#endif /* __MAIN_H */
main.c:
#include "main.h"
// 定義編碼器占用的GPIO引腳
static REHandle_t REVal={
.GPIO_A=GPIO_PORT_A,
.PIN_A=GPIO_PIN_12,
.GPIO_B=GPIO_PORT_A,
.PIN_B=GPIO_PIN_13
};
static const uint8_t STEPMAX=10, STEPMIN=0;
static uint8_t step=0; // 控制LED亮度等級
static void RotaryScan(void); // 編碼器識別與處理
// PWM輸出初始化
#define PWM_CHANNEL PWM_GROUP1_CH2
#define PWM_MODE PWM_CYCLE_MODE
#define PWM_GPIO_PORT GPIO_PORT_A
#define PWM_GPIO_PIN GPIO_PIN_21
#define PWM_GPIO_MODE GPIOA_P21_F4_PWM2_ECT2
static int max_duty_ratio; // PWM計數上限
static void PWMCycleModeSet(void); // PWM重復輸出模式初始化
static HAL_Status PWMDutyRatioSet(int val); // 設置PWM輸出占空比
// FreeRTOS配置
#define TASK_RE_PRIO 1
#define TASK_RE_STK_SIZE 200
static TaskHandle_t TaskRE_Handler=NULL;
static void TaskCreation(void); // 創建任務
static void TaskRE(void *pvParameters); // 編碼器識別任務
int main(void)
{
printf("Rotary encoder & PWM demo.rn"); // 串口輸出相關信息
RotaryEncoderInit(&REVal); // 初始化編碼器
PWMCycleModeSet(); // 初始化PWM
PWMDutyRatioSet(max_duty_ratio*step/STEPMAX); // 設置PWM輸出占空比
TaskCreation(); // 創建任務
// 任務調度不需要用戶指定
return 0;
}
static void TaskCreation(void)
{
BaseType_t xRet = NULL;
taskENTER_CRITICAL();
xRet = xTaskCreate((TaskFunction_t )TaskRE, (const char *)"TaskRE", (uint16_t)TASK_RE_STK_SIZE,
(void *)NULL, (UBaseType_t)TASK_RE_PRIO, (TaskHandle_t *)&TaskRE_Handler);
if(pdPASS == xRet) {
printf("TaskRE created!rn"); // 任務創建成功
}
taskEXIT_CRITICAL();
}
static void TaskRE(void *pvParameters)
{
while (1) {
RotaryScan(); // 識別編碼器步進
vTaskDelay(10); // 延遲10(ms)
}
}
static void RotaryScan(void)
{
RotaryEncoderProcess(&REVal); // 識別編碼器步進
if(DIR_CW == REVal.RetVal) { // 順時針步進
if(step< STEPMAX) {
step++; // 增大亮度,上限是STEPMAX
PWMDutyRatioSet(max_duty_ratio*step/STEPMAX);
printf("%d ", step);
}
} else if(DIR_CCW == REVal.RetVal) {
if(step >STEPMIN) {
step--; // 減小亮度,下限是STEPMIN
PWMDutyRatioSet(max_duty_ratio*step/STEPMAX);
printf("%d ", step);
}
}
}
static void PWMCycleModeSet(void)
{
// 初始化硬件所需變量聲明
GPIO_InitParam io_param = {0};
HAL_Status status = HAL_ERROR;
PWM_ClkParam clk_param = {0};
PWM_ChInitParam ch_param = {0};
// 配置GPIO復用,官方例程里面缺了這一部分
io_param.driving = GPIO_DRIVING_LEVEL_1;
io_param.mode = PWM_GPIO_MODE;
io_param.pull = GPIO_PULL_NONE;
HAL_GPIO_Init(PWM_GPIO_PORT, PWM_GPIO_PIN, &io_param);
// 配置PWM時鐘源
clk_param.clk = PWM_CLK_HOSC;
clk_param.div = PWM_SRC_CLK_DIV_1;
status = HAL_PWM_GroupClkCfg(PWM_CHANNEL / 2, &clk_param);
if (status != HAL_OK) {
printf("%s(): %d, PWM group clk config errorn", __func__, __LINE__);
}
// 配置PWM模式,頻率和極性
ch_param.hz = 1000;
ch_param.mode = PWM_MODE;
ch_param.polarity = PWM_HIGHLEVE;
max_duty_ratio = HAL_PWM_ChInit(PWM_CHANNEL, &ch_param);
if (max_duty_ratio == -1) {
printf("%s(): %d, PWM ch init errorn", __func__, __LINE__);
}
// 設置占空比
status = HAL_PWM_ChSetDutyRatio(PWM_CHANNEL, max_duty_ratio / 2);
if (status != HAL_OK) {
printf("%s(): %d, PWM set duty ratio errorn", __func__, __LINE__);
}
// 使能通道
status = HAL_PWM_EnableCh(PWM_CHANNEL, PWM_MODE, 1);
if (status != HAL_OK) {
printf("%s(): %d, PWM ch enable errorn", __func__, __LINE__);
}
}
static HAL_Status PWMDutyRatioSet(int val)
{
return HAL_PWM_ChSetDutyRatio(PWM_CHANNEL, val);
}
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
旋轉編碼器
+關注
關注
5文章
159瀏覽量
26025 -
LED調光
+關注
關注
0文章
61瀏覽量
16372 -
GNU
+關注
關注
0文章
143瀏覽量
17542 -
MCU控制
+關注
關注
0文章
48瀏覽量
6790 -
PWM輸出
+關注
關注
1文章
66瀏覽量
5219
發布評論請先 登錄
相關推薦
基于全志XR806開發板的家用環境監測傳感器設計
本文來自全志XR806開發板評測活動文章,作者使用XR806開發板制作一個簡單的家用環境監測傳感器,可以獲取當前的溫度、濕度、氣壓、海拔這四

OpenHarmony南向嵌入式:【XR806開發板指導文檔】
XR806_OpenHarmony開發板是基于XR806芯片設計開發的參考評估,板身集成了XR806
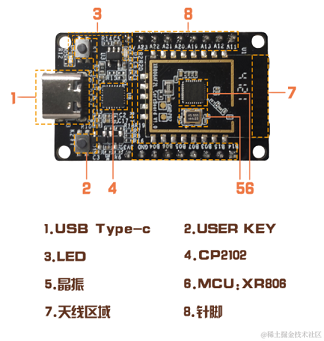
XR806芯片、XR806開源鴻蒙開發板簡介
。可廣泛滿足 智能家居、智慧樓宇、工業互聯、兒童玩具、電子競賽、極客DIY 等領域的無線連接需求。芯片框圖芯片參數XR806開源鴻蒙開發板介紹XR806開發板是基于
發表于 11-15 17:08
XR806芯片、XR806開源鴻蒙開發板簡介
。可廣泛滿足 智能家居、智慧樓宇、工業互聯、兒童玩具、電子競賽、極客DIY 等領域的無線連接需求。芯片框圖芯片參數XR806開源鴻蒙開發板介紹XR806開發板是基于
發表于 11-15 18:32
簡述星辰處理器的全志XR806鴻蒙開發板上手體驗
本文轉載于極術社區極術專欄:STAR CPU(星辰處理器)作者:PingYang XR806鴻蒙開發板是全志科技新出的一款支持WiFi和BLE的高集成度無線MCU芯片,支持鴻蒙L0系統。CPU采用

簡述XR806開發板與STAR-MC1處理器
全志XR806開發板基于XR806芯片設計,搭載了安謀中國的星辰系列STAR-MC1處理器。該開發板體積較小,具備WiFi、低功耗藍牙技術等
【XR806開發板試用】留言板功能開發
XR806開源鴻蒙開發板是一款基于XR806芯片設計,高度集成WiFi/BLE/常用外設,可供開發者進行方案評估、DIY或小規模產品研發,可
【XR806開發板試用】FreeRTOS創建任務測試
這篇來學習下,XR806開發板在FreeRTOS系統下創建兩個任務測試,由于沒有找到學習的文檔,試著參考例程來測試。
使用XR806芯片驅動一下DHT11溫濕度傳感器
參與全志在線與極術社區聯合舉辦的開發板試用活動,收到寄來的全志XR806開發板,之前用過很多全志的SOC芯片,但是像這種無線芯片還是第一次用。這次打算使用
發表于 10-13 17:28
?693次閱讀

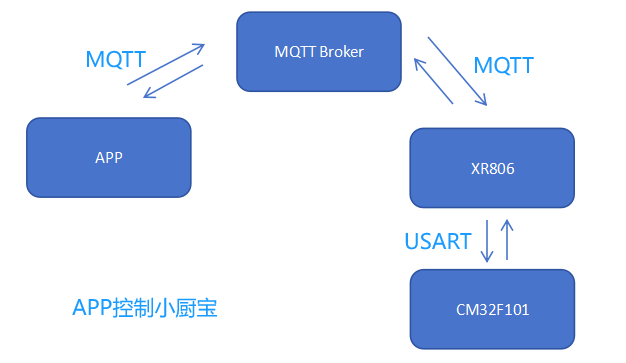
XR806串口驅動CM32M對小廚寶的控制實驗
非常感謝基于安謀科技STAR-MC1的全志XR806 Wi-Fi+BLE開源鴻蒙開發板試用活動,并獲得開發板試用。





 工商網監
工商網監
評論