") 仿真系統(tǒng)軟件的架構(gòu)是什么
仿真系統(tǒng)軟件的架構(gòu)是什么
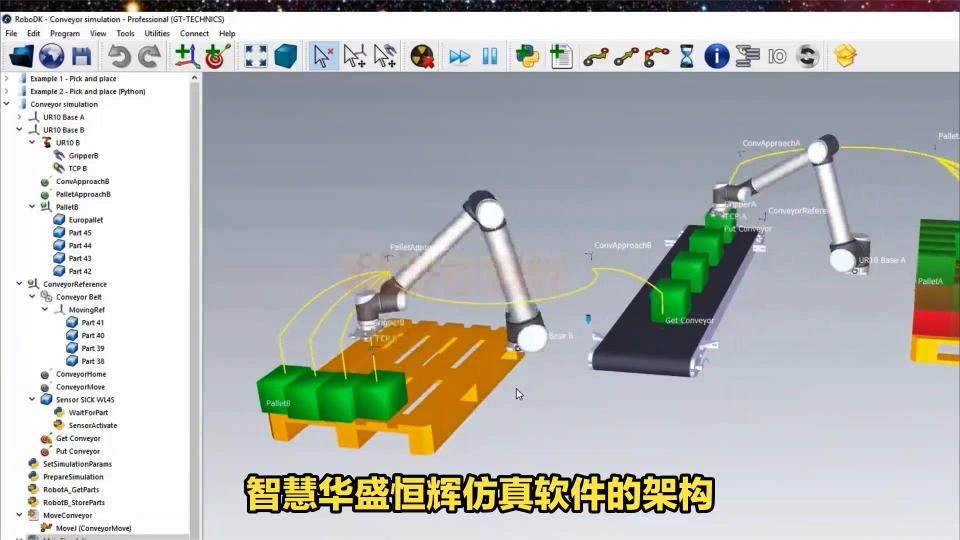
仿真軟件的架構(gòu)可以包括以下幾個(gè)部分:
硬件驅(qū)動(dòng)部分:負(fù)責(zé)驅(qū)動(dòng)硬件,向上一層提供底層硬件的操作接口。仿真系統(tǒng)通過硬件驅(qū)動(dòng)為嵌入式軟件提供相應(yīng)的通信接口,用于嵌入式軟件和仿真系統(tǒng)之間的數(shù)據(jù)交換。
仿真模型部分:這是仿真軟件的核心,它可以包括系統(tǒng)動(dòng)力學(xué)模型、硬件在環(huán)模型等多種類型。這些模型描述了系統(tǒng)在不同條件下的行為和表現(xiàn),例如系統(tǒng)的動(dòng)態(tài)特性、熱力學(xué)特性等等。
人機(jī)交互部分:仿真軟件需要提供可視化界面,方便用戶進(jìn)行仿真實(shí)驗(yàn)的設(shè)置、執(zhí)行和結(jié)果查看。人機(jī)交互部分應(yīng)具備友好的圖形界面,使用戶能夠方便地進(jìn)行模型的建立、修改和刪除等操作。
數(shù)據(jù)處理部分:仿真軟件需要對(duì)數(shù)據(jù)進(jìn)行處理和分析,例如對(duì)仿真結(jié)果進(jìn)行數(shù)據(jù)處理、數(shù)據(jù)存儲(chǔ)和數(shù)據(jù)可視化等操作。
控制部分:仿真軟件需要有控制部分,控制部分的架構(gòu)可以影響仿真的精度和速度。控制部分的架構(gòu)應(yīng)該具備穩(wěn)定性、可靠性和靈活性等特性。
網(wǎng)絡(luò)通信部分:仿真軟件還需要具備網(wǎng)絡(luò)通信功能,通過網(wǎng)絡(luò)通信可以實(shí)現(xiàn)對(duì)仿真實(shí)驗(yàn)的遠(yuǎn)程控制和數(shù)據(jù)傳輸?shù)裙δ堋?/p>
以上是仿真軟件的一般架構(gòu),不同的仿真軟件可能會(huì)有一些差異。同時(shí),仿真軟件的設(shè)計(jì)和實(shí)現(xiàn)也需要考慮易用性、可擴(kuò)展性、可維護(hù)性等多種因素。
審核編輯 黃宇
-
架構(gòu)
+關(guān)注
關(guān)注
1文章
528瀏覽量
25892 -
仿真系統(tǒng)
+關(guān)注
關(guān)注
1文章
104瀏覽量
21128
發(fā)布評(píng)論請(qǐng)先 登錄


電磁數(shù)據(jù)展示系統(tǒng)軟件平臺(tái)全面解析
電磁軌跡預(yù)測(cè)分析系統(tǒng)軟件全面解析
基于衛(wèi)星圖像的智能定位系統(tǒng)軟件
AN135-為L(zhǎng)TC3880實(shí)施強(qiáng)大的PMBus系統(tǒng)軟件

電磁兼容系統(tǒng)軟件(EMC系統(tǒng))
WDS分布式存儲(chǔ)系統(tǒng)軟件助力電信工程海量數(shù)據(jù)存儲(chǔ)項(xiàng)目

選擇PoE PSE系統(tǒng)軟件解決方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論