") 伺服電機(jī)和無(wú)刷電機(jī)的主要區(qū)別
伺服電機(jī)和無(wú)刷電機(jī)的主要區(qū)別
近年來(lái),隨著集成電路、電力電子技術(shù)和交流可變速驅(qū)動(dòng)技術(shù)的發(fā)展,各類電機(jī)驅(qū)動(dòng)技術(shù)都有了突出的發(fā)展。
其中,無(wú)刷電機(jī)(Brushless Motor)和伺服電機(jī)(Servo Motor)是兩種最常見(jiàn)的電機(jī)驅(qū)動(dòng)類型,它們?cè)谠O(shè)計(jì)、控制和應(yīng)用方面有一些區(qū)別。
直流無(wú)刷電機(jī)通過(guò)接受電動(dòng)機(jī)的啟動(dòng)、停止、制動(dòng)信號(hào),以控制電動(dòng)機(jī)的啟動(dòng)、停止和制動(dòng);接受位置傳感器信號(hào)和正反轉(zhuǎn)信號(hào),用來(lái)控制逆變橋各功率管的通斷,產(chǎn)生連續(xù)轉(zhuǎn)矩;接受速度指令和速度反饋信號(hào),用來(lái)控制和調(diào)整轉(zhuǎn)速;提供保護(hù)和顯示等等。
伺服電機(jī)系統(tǒng)是使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意變化的自動(dòng)控制系統(tǒng)。其中伺服電機(jī)可以控制速度,位置精度非常準(zhǔn)確,可以將電壓信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對(duì)象。伺服電機(jī)的應(yīng)用范圍為如機(jī)床、印刷設(shè)備、自動(dòng)化生產(chǎn)線等對(duì)工藝精度、加工效率和工作可靠性等要求相對(duì)較高的設(shè)備。
以下是它們之間的主要區(qū)別:
一、組成不同
伺服電機(jī)包括一個(gè)電機(jī)、一個(gè)編碼器和一個(gè)控制器組成。編碼器給出反饋信號(hào),控制器接收反饋信號(hào)并控制電機(jī)轉(zhuǎn)速、方向和位置。控制器可以直接編程,以便更好更精確地控制電機(jī)。
而直流無(wú)刷電機(jī)只包括一個(gè)無(wú)刷電機(jī)和一個(gè)控制器。控制器接收輸入信號(hào)并控制電機(jī)旋轉(zhuǎn)、停止和反轉(zhuǎn)。
因此,伺服電機(jī)具有更完整的閉環(huán)控制能力,可以更準(zhǔn)確地定位。
二、工作原理的不同
無(wú)刷直流電機(jī)的工作原理與傳統(tǒng)的直流電機(jī)相同,都是使用直流電磁場(chǎng)相互作用的原理來(lái)實(shí)現(xiàn)電機(jī)的運(yùn)轉(zhuǎn)。但是,與傳統(tǒng)的直流電機(jī)不同的是,無(wú)刷直流電機(jī)采用永磁體作為轉(zhuǎn)子,使用電子控制器改變轉(zhuǎn)子上的磁場(chǎng)方向,從而控制電機(jī)的運(yùn)轉(zhuǎn)速度和方向。
伺服電機(jī)的工作原理則是通過(guò)接受外部控制器發(fā)出的電脈沖信號(hào)來(lái)改變電機(jī)的位置和轉(zhuǎn)速。控制器會(huì)將電脈沖信號(hào)傳輸給電機(jī),控制電機(jī)的轉(zhuǎn)子轉(zhuǎn)動(dòng)一定的角度,以使電機(jī)的輸出角度精確控制在給定范圍內(nèi)。
三、控制方式的不同
伺服電機(jī)和直流無(wú)刷電機(jī)都非常容易控制,但是伺服電機(jī)可以更好地控制電機(jī)的位置和速度。因?yàn)樗欧姍C(jī)有反饋機(jī)制,可以在很短時(shí)間內(nèi)調(diào)整電機(jī)的位置和速度,以達(dá)到更精確的控制。伺服電機(jī)可以在工作過(guò)程中實(shí)現(xiàn)高速、高加速度和高精度的運(yùn)動(dòng)。
而采用開(kāi)環(huán)控制的直流無(wú)刷電機(jī)可以通過(guò)直接改變電源電壓和電流來(lái)實(shí)現(xiàn)速度和方向的控制,也可以使用電子控制器來(lái)調(diào)節(jié)電機(jī)的轉(zhuǎn)速,這可能導(dǎo)致其在位置控制方面不如伺服電機(jī)精確。盡管可以進(jìn)行反饋控制,但精確性和控制能力有限于閉環(huán)控制。
四、性能特點(diǎn)不同
直流無(wú)刷電機(jī):可靠性高,穩(wěn)定性好,適應(yīng)性強(qiáng),維修與保養(yǎng)簡(jiǎn)單;耐顛簸震動(dòng),噪音低,震動(dòng)小,運(yùn)轉(zhuǎn)平滑,壽命長(zhǎng);不產(chǎn)生火花,特別適合爆炸性場(chǎng)所,有防爆型;根據(jù)需要可選梯形波磁場(chǎng)電機(jī)和正弦波磁場(chǎng)電機(jī)。
交流伺服電機(jī):無(wú)電刷和換向器,因此工作可靠,對(duì)維護(hù)和保養(yǎng)要求低。定子繞組散熱比較方便。慣量小,易于提高系統(tǒng)的快速性。適應(yīng)于高速大力矩工作狀態(tài)。
五、應(yīng)用場(chǎng)景不同
無(wú)刷直流電機(jī)適用于需要高速轉(zhuǎn)動(dòng)、需要力矩平穩(wěn)控制、精度要求相對(duì)較低的場(chǎng)合。如自行車、電動(dòng)工具、家用電器等。
伺服電機(jī)則適用于要求高精度、高速度和高度控制精度的應(yīng)用場(chǎng)合。如工業(yè)機(jī)械臂、數(shù)控機(jī)床、機(jī)器人、服裝機(jī)械、印刷設(shè)備、模具加工、飛行器、航天器等。
總的來(lái)說(shuō),無(wú)刷直流電機(jī)和伺服電機(jī)在機(jī)械制造、自動(dòng)化控制等領(lǐng)域有著廣泛的應(yīng)用。無(wú)刷直流電機(jī)可以簡(jiǎn)單地通過(guò)改變電壓和電流來(lái)控制,但伺服電機(jī)需要專門的控制器進(jìn)行控制。在選擇電機(jī)時(shí)應(yīng)根據(jù)應(yīng)用場(chǎng)景的要求選擇合適的電機(jī),以實(shí)現(xiàn)更好的性能和控制。
作為國(guó)內(nèi)領(lǐng)先的高性能MCU研發(fā)企業(yè),先楫半導(dǎo)體芯片產(chǎn)品可應(yīng)用于工業(yè)自動(dòng)化中的編碼器和伺服驅(qū)動(dòng)器領(lǐng)域,先楫HPM6000系列芯片產(chǎn)品采用全新的RISC-V芯片系統(tǒng)架構(gòu)定義、全新CPU內(nèi)核、大量自主創(chuàng)新的IP設(shè)計(jì),以及完整的配套生態(tài),打造出了高性能的國(guó)產(chǎn)MCU系列,使我們的客戶可以在不必增加成本和功耗的前提下,滿足更高效的工業(yè)控制,更豐富的顯示功能和更強(qiáng)大的數(shù)據(jù)處理要求。
下列為先楫半導(dǎo)體在電機(jī)驅(qū)動(dòng)領(lǐng)域的一些主控芯片與方案:
HPM5300
HPM5300是先楫半導(dǎo)體面向工業(yè)自動(dòng)化、新能源及汽車電子三大應(yīng)用領(lǐng)域推出的一款高性能運(yùn)動(dòng)控制微控制器產(chǎn)品。
HPM5300支持雙精度浮點(diǎn)運(yùn)算及強(qiáng)大的 DSP 擴(kuò)展,主頻 480MHz,達(dá)到甚至超越國(guó)際主流高性能 MCU 產(chǎn)品,滿足大多數(shù)應(yīng)用場(chǎng)景下的開(kāi)發(fā)需求。
目前,HPM5300系列產(chǎn)品已經(jīng)廣泛應(yīng)用于工業(yè)自動(dòng)化中的編碼器和伺服驅(qū)動(dòng)器,新能源中的微型逆變器,汽車電子中的 IMU、ECU 和汽車座椅門控模塊等產(chǎn)業(yè)中。
HPM6700/6400
先楫主打產(chǎn)品HPM6700/6400系列不僅擁有816MHz的主頻、還有LCD驅(qū)動(dòng)、2D圖形加速、JPEG解碼、音頻輸入等多媒體外設(shè),具備17個(gè)串口、雙千兆以太網(wǎng)等通訊外設(shè),還具備4組電機(jī)控制模塊,能輸出32路PWM輸出、接4個(gè)編碼器,可以完成單芯片驅(qū)動(dòng)4個(gè)電機(jī)。可以實(shí)現(xiàn)LCD顯示、音頻信號(hào)處理、數(shù)據(jù)轉(zhuǎn)發(fā)透?jìng)鳌㈦姍C(jī)控制等功能,主要應(yīng)用于工業(yè)自動(dòng)化、電機(jī)控制、電源管理、物聯(lián)網(wǎng)等領(lǐng)域。
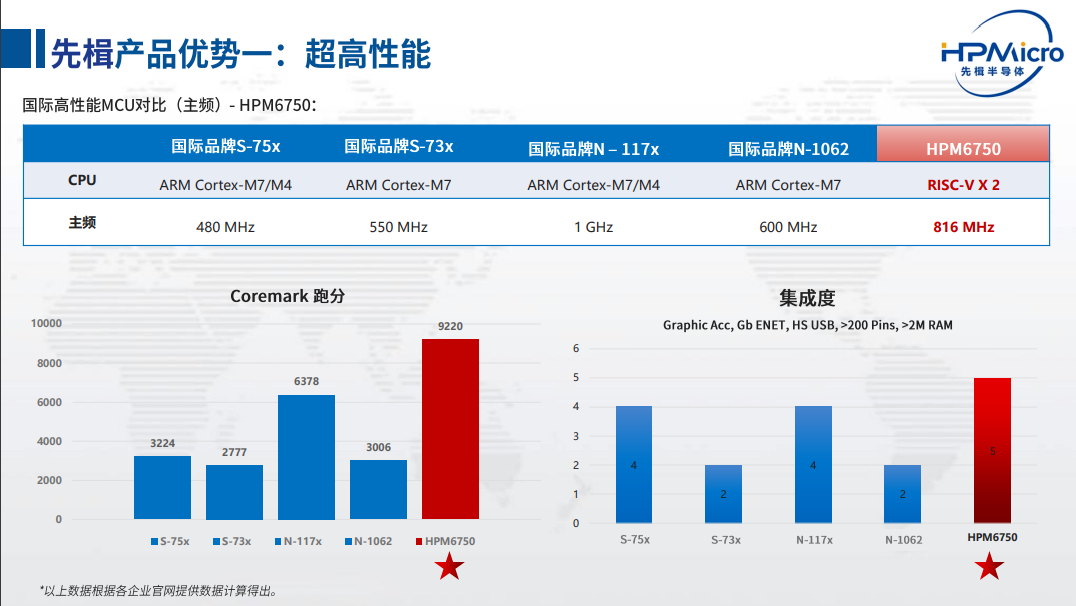
HPM6750系列芯片支持4套電機(jī)控制單元,每個(gè)單元包括1個(gè)PWM定時(shí)器,一個(gè)正交編碼器接口,一個(gè)霍爾傳感器接口和1個(gè)互聯(lián)管理接口,配合片上提供的數(shù)模轉(zhuǎn)換ADC模塊和ACMP等外設(shè),可以實(shí)現(xiàn)同時(shí)控制4個(gè)電機(jī)。包含1個(gè)同步定時(shí)器,可以用于4套電機(jī)控制單元間進(jìn)行同步,實(shí)現(xiàn)HMI與四軸伺服運(yùn)動(dòng)控制,無(wú)需總線通信反饋與交互控制,片內(nèi)完成所有數(shù)據(jù)采集、處理和顯示,對(duì)伺服控制和四電機(jī)的同步控制效率大大提高。
磁編碼器方案
主控芯片:先楫HPM5300系列
方案特點(diǎn):
分辨率:17b
支持最高轉(zhuǎn)速:6000RPM
支持增益偏差校正
支持溫漂補(bǔ)償
支持掉電多圈保存
支持Offset校正
先楫優(yōu)勢(shì):
高算力:480MHz
2 X 16b ADC
輸出協(xié)議豐富
片內(nèi)可編程運(yùn)放,支持差分輸入
低功耗:1.5uA
小封裝:QFN 48
應(yīng)用場(chǎng)景:伺服驅(qū)動(dòng)器、機(jī)器人等
旋變硬/軟解碼方案
主控芯片:先楫HPM5300和和HPM6000系列
方案特點(diǎn):
硬解碼:RDC硬件支持快速的旋變解碼
軟解碼:成熟方案,使用HPM5000~6000
16b ADC帶來(lái)更好的解碼性能
高算力、高主頻帶來(lái)解碼低延時(shí)
豐富的編碼器接口和協(xié)議,可以統(tǒng)一編碼器平臺(tái),如磁編、光編和旋變等
先楫優(yōu)勢(shì):HPM5300系列可結(jié)合QEO和SEI,可以支持多種方式輸出,如Tamagawa、EnData、正交脈沖等。
應(yīng)用場(chǎng)景:工況或環(huán)境惡劣的電機(jī)驅(qū)動(dòng),如
新能源車:電機(jī)驅(qū)動(dòng)
CNC機(jī)床、磨床等
單芯片4軸驅(qū)顯一體伺服方案
主控芯片:先楫HPM6000系列
方案簡(jiǎn)介:四軸伺服解決方案采用高性能的 HPM6750 作為主控,單芯片實(shí)現(xiàn) HMI 與四軸伺服運(yùn)動(dòng)控制,穩(wěn)定性好、響應(yīng)速度快、控制精度高,無(wú)需總線通信反饋與交互控制,片內(nèi)完成所有數(shù)據(jù)采集、處理和顯示,對(duì)伺服控制和四電機(jī)的同步控制效率大大提高。
方案特點(diǎn):
816MHz 主頻控制器,性能強(qiáng)悍
多伺服電機(jī)控制,高精度位置控制
集傳感器數(shù)據(jù)采集、顯示、交互、多電機(jī)控制于一體
相比模塊化的伺服控制系統(tǒng),方案性能和效率大大提高
應(yīng)用場(chǎng)景:多軸協(xié)同場(chǎng)景,如
機(jī)器人:工業(yè)機(jī)器人、SCARA機(jī)器人
機(jī)床加工、伺服方案
審核編輯:湯梓紅
-
集成電路
+關(guān)注
關(guān)注
5420文章
11987瀏覽量
367537 -
伺服電機(jī)
+關(guān)注
關(guān)注
88文章
2107瀏覽量
59309 -
無(wú)刷電機(jī)
+關(guān)注
關(guān)注
60文章
886瀏覽量
47171 -
驅(qū)動(dòng)芯片
+關(guān)注
關(guān)注
13文章
1393瀏覽量
56149 -
RISC-V
+關(guān)注
關(guān)注
46文章
2512瀏覽量
48400
原文標(biāo)題:伺服電機(jī)、無(wú)刷電機(jī)選型要素解析,高性能RISC-V電機(jī)驅(qū)動(dòng)芯片、方案介紹
文章出處:【微信號(hào):HPMicro,微信公眾號(hào):先楫半導(dǎo)體HPMicro】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
有刷電機(jī)與無(wú)刷電機(jī)工作原理是什么?有何區(qū)別?
有刷電機(jī)和無(wú)刷電機(jī)的主要區(qū)別在哪
步進(jìn)電機(jī)和伺服電機(jī)的主要區(qū)別在哪里
步進(jìn)電機(jī)和伺服電機(jī)之間的主要區(qū)別是什么呢?
DD無(wú)刷電機(jī)和BLDC無(wú)刷電機(jī)的區(qū)別
步進(jìn)電機(jī)和伺服電機(jī)的主要區(qū)別

步進(jìn)電機(jī)和伺服電機(jī)的主要區(qū)別






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論