 如何實現一套linux進程間通信的機制
如何實現一套linux進程間通信的機制
我們知道linux的進程的間通信的組件有管道,消息隊列,socket, 信號量,共享內存等。但是我們如果自己實現一套進程間通信的機制的話,要怎么做?了解android 開發的可能會知道,android里面有個binder機制,簡單來說,就是一個進程往binder里面寫數據,另一個進程從binder里面讀出數據。
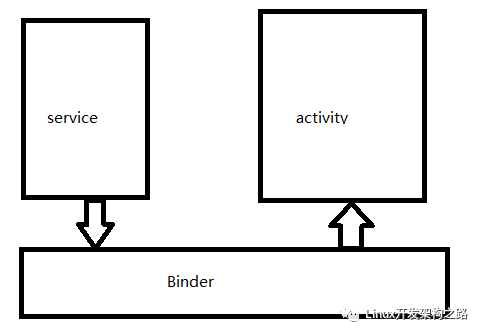
所以我們也可以按照binder的思路來設計一個自己的進程間通信組件。
原理

我們的設計思路很簡單,我們首先需要注冊一個字符設備文件叫**/dev/channel**, 同時需要為這個設備編寫驅動,此時某個進程A向設備文件寫數據,同時如果該設備可讀,我們就通知另一個進程B去讀該進程。 我們怎么知道該設備是否可讀可寫呢?使用poll來管理,因為該設備驅動屬于一個IO, 打開一個設備就有fd, 有了fd我們就可以使用poll來管理。
代碼實現
首先驅動程序:
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#ifndef CHANNEL_MAJOR
#define CHANNEL_MAJOR 96
#endif
#ifndef CHANNEL_NR_DEVS
#define CHANNEL_NR_DEVS 2
#endif
#ifndef CHANNEL_SIZE
#define CHANNEL_SIZE 4096
#endif
#define ENABLE_POLL 1
struct channel {
char *data;
unsigned long size;
#if ENABLE_POLL
wait_queue_head_t inq;
#endif
};
static int channel_major = CHANNEL_MAJOR;
module_param(channel_major, int, S_IRUGO);
struct channel *channel_devp;
struct cdev cdev;
char have_data = 0;
int channel_open (struct inode *inode, struct file *filp) {
struct channel *channel;
int num = MINOR(inode->i_rdev); //設備讀了多少次
if (num >= CHANNEL_NR_DEVS)
return -ENODEV;
channel = &channel_devp[num];
filp->private_data = channel;
return 0;
}
int channel_release (struct inode *inode, struct file *filp) {
return 0;
}
#if ENABLE_POLL
unsigned int channel_poll (struct file *filp, struct poll_table_struct *wait) {
struct channel *channel = filp->private_data;
unsigned int mask = 0;
poll_wait(filp, &channel->inq, wait); // poll 阻塞
if (have_data)
mask |= (POLLIN | POLLRDNORM);
return mask;
}
#endif
int channel_mmap (struct file *filp, struct vm_area_struct *vma) {
struct channel *channel = filp->private_data;
vma->vm_flags |= VM_IO;
vma->vm_flags |= (VM_DONTEXPAND | VM_DONTDUMP);
if (remap_pfn_range(vma, vma->vm_start, virt_to_phys(channel->data) >> PAGE_SHIFT,
vma->vm_end-vma->vm_start, vma->vm_page_prot)) {
return -EAGAIN;
}
return 0;
}
ssize_t channel_read (struct file *filp, char __user * buffer, size_t size, loff_t *ppos) {
unsigned long p = *ppos;
unsigned int count = size;
int ret = 0;
struct channel *channel = filp->private_data; // 讀私有空間
if (p >= CHANNEL_SIZE) return 0;
if (count > CHANNEL_SIZE- p)
count = CHANNEL_SIZE- p;
#if ENABLE_POLL
while (!have_data) {
if (filp->f_flags & O_NONBLOCK) return -EAGAIN;
wait_event_interruptible(channel->inq, have_data);
}
#endif
if (copy_to_user(buffer, (void*)(channel->data + p), count)) { //拷貝到用戶空間
ret = -EFAULT;
} else {
ret = strlen(buffer);
channel->size -= ret;
printk(KERN_INFO "read %d byte(s) from %ldn", ret, p);
}
have_data = 0;
return ret;
}
ssize_t channel_write (struct file *filp , const char __user * buffer, size_t size, loff_t *ppos) {
int ret = 0;
unsigned long p = *ppos;
unsigned int count = size;
struct channel *channel = filp->private_data; // 寫道文件的私有空間
if (p >= CHANNEL_SIZE) return 0;
if (count > CHANNEL_SIZE- p)
count = CHANNEL_SIZE- p;
if (copy_from_user(channel->data +p, buffer, count)) { // 從user -> kernel
return -EFAULT;
} else {
*ppos += count;
ret = count;
channel->size += count;
*(channel->data+p + count) = '?';
printk(KERN_INFO "written %d byte(s) from %ldn", count, p);
}
#if ENABLE_POLL
have_data = 1;
wake_up(&channel->inq);
#endif
return ret;
}
loff_t channel_llseek (struct file *filp, loff_t offset, int whence) { //偏移
loff_t newpos;
switch (whence)
{
case 0:
newpos = offset;
break;
case 1:
newpos = filp->f_pos + offset;
break;
case 2:
newpos = CHANNEL_SIZE - 1 + offset;
break;
default:
return -EINVAL;
}
if (newpos < 0 || newpos > CHANNEL_SIZE) return -EINVAL;
filp->f_pos = newpos;
return newpos;
}
static const struct file_operations channel_fops =
{
.owner = THIS_MODULE,
.llseek = channel_llseek,
.read = channel_read,
.write = channel_write,
.open = channel_open,
.release = channel_release,
.poll = channel_poll,
.mmap = channel_mmap,
};
static int channel_init(void) {
int reslut;
int i;
dev_t devno = MKDEV(channel_major, 0); // 創建一個主設備號為96,次設備號為0的設備
if (channel_major) {
reslut = register_chrdev_region(devno, CHANNEL_NR_DEVS, "channel"); // 注冊設備
} else {
reslut = alloc_chrdev_region(&devno, 0, CHANNEL_NR_DEVS, "channel");
}
if (reslut < 0) return reslut;
cdev_init(&cdev, &channel_fops); //初始化字符設備
cdev.owner = THIS_MODULE;
cdev_add(&cdev, MKDEV(channel_major, 0), CHANNEL_NR_DEVS); //添加到字符設備中
channel_devp = kmalloc(CHANNEL_NR_DEVS *sizeof(struct channel), GFP_KERNEL); //為 我們的buffer 分配一塊空間
if (!channel_devp) {
reslut = -ENOMEM;
goto fail_malloc;
}
memset(channel_devp, 0, sizeof(struct channel));
for (i = 0; i < CHANNEL_NR_DEVS; i++) {
channel_devp[i].size = CHANNEL_SIZE;
channel_devp[i].data = kmalloc(CHANNEL_SIZE, GFP_KERNEL);
memset(channel_devp[i].data, 0, CHANNEL_SIZE);
#if ENABLE_POLL
init_waitqueue_head(&(channel_devp[i].inq));
#endif
}
printk(KERN_INFO "ntychannel_init");
return 0;
fail_malloc:
unregister_chrdev_region(devno, 1);
return reslut;
}
static void channel_exit(void) {
printk(KERN_INFO "channel_exit");
cdev_del(&cdev);
kfree(channel_devp);
unregister_chrdev_region(MKDEV(channel_major, 0), 2);
}
MODULE_AUTHOR("birate");
MODULE_LICENSE("GPL");
module_init(channel_init); // 設備初始化
module_exit(channel_exit); //設備退出
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#ifndef CHANNEL_MAJOR
#define CHANNEL_MAJOR 96
#endif
#ifndef CHANNEL_NR_DEVS
#define CHANNEL_NR_DEVS 2
#endif
#ifndef CHANNEL_SIZE
#define CHANNEL_SIZE 4096
#endif
#define ENABLE_POLL 1
struct channel {
char *data;
unsigned long size;
#if ENABLE_POLL
wait_queue_head_t inq;
#endif
};
static int channel_major = CHANNEL_MAJOR;
module_param(channel_major, int, S_IRUGO);
struct channel *channel_devp;
struct cdev cdev;
char have_data = 0;
int channel_open (struct inode *inode, struct file *filp) {
struct channel *channel;
int num = MINOR(inode->i_rdev); //設備讀了多少次
if (num >= CHANNEL_NR_DEVS)
return -ENODEV;
channel = &channel_devp[num];
filp->private_data = channel;
return 0;
}
int channel_release (struct inode *inode, struct file *filp) {
return 0;
}
#if ENABLE_POLL
unsigned int channel_poll (struct file *filp, struct poll_table_struct *wait) {
struct channel *channel = filp->private_data;
unsigned int mask = 0;
poll_wait(filp, &channel->inq, wait); // poll 阻塞
if (have_data)
mask |= (POLLIN | POLLRDNORM);
return mask;
}
#endif
int channel_mmap (struct file *filp, struct vm_area_struct *vma) {
struct channel *channel = filp->private_data;
vma->vm_flags |= VM_IO;
vma->vm_flags |= (VM_DONTEXPAND | VM_DONTDUMP);
if (remap_pfn_range(vma, vma->vm_start, virt_to_phys(channel->data) >> PAGE_SHIFT,
vma->vm_end-vma->vm_start, vma->vm_page_prot)) {
return -EAGAIN;
}
return 0;
}
ssize_t channel_read (struct file *filp, char __user * buffer, size_t size, loff_t *ppos) {
unsigned long p = *ppos;
unsigned int count = size;
int ret = 0;
struct channel *channel = filp->private_data; // 讀私有空間
if (p >= CHANNEL_SIZE) return 0;
if (count > CHANNEL_SIZE- p)
count = CHANNEL_SIZE- p;
#if ENABLE_POLL
while (!have_data) {
if (filp->f_flags & O_NONBLOCK) return -EAGAIN;
wait_event_interruptible(channel->inq, have_data);
}
#endif
if (copy_to_user(buffer, (void*)(channel->data + p), count)) { //拷貝到用戶空間
ret = -EFAULT;
} else {
ret = strlen(buffer);
channel->size -= ret;
printk(KERN_INFO "read %d byte(s) from %ldn", ret, p);
}
have_data = 0;
return ret;
}
ssize_t channel_write (struct file *filp , const char __user * buffer, size_t size, loff_t *ppos) {
int ret = 0;
unsigned long p = *ppos;
unsigned int count = size;
struct channel *channel = filp->private_data; // 寫道文件的私有空間
if (p >= CHANNEL_SIZE) return 0;
if (count > CHANNEL_SIZE- p)
count = CHANNEL_SIZE- p;
if (copy_from_user(channel->data +p, buffer, count)) { // 從user -> kernel
return -EFAULT;
} else {
*ppos += count;
ret = count;
channel->size += count;
*(channel->data+p + count) = '?';
printk(KERN_INFO "written %d byte(s) from %ldn", count, p);
}
#if ENABLE_POLL
have_data = 1;
wake_up(&channel->inq);
#endif
return ret;
}
loff_t channel_llseek (struct file *filp, loff_t offset, int whence) { //偏移
loff_t newpos;
switch (whence)
{
case 0:
newpos = offset;
break;
case 1:
newpos = filp->f_pos + offset;
break;
case 2:
newpos = CHANNEL_SIZE - 1 + offset;
break;
default:
return -EINVAL;
}
if (newpos < 0 || newpos > CHANNEL_SIZE) return -EINVAL;
filp->f_pos = newpos;
return newpos;
}
static const struct file_operations channel_fops =
{
.owner = THIS_MODULE,
.llseek = channel_llseek,
.read = channel_read,
.write = channel_write,
.open = channel_open,
.release = channel_release,
.poll = channel_poll,
.mmap = channel_mmap,
};
static int channel_init(void) {
int reslut;
int i;
dev_t devno = MKDEV(channel_major, 0); // 創建一個主設備號為96,次設備號為0的設備
if (channel_major) {
reslut = register_chrdev_region(devno, CHANNEL_NR_DEVS, "channel"); // 注冊設備
} else {
reslut = alloc_chrdev_region(&devno, 0, CHANNEL_NR_DEVS, "channel");
}
if (reslut < 0) return reslut;
cdev_init(&cdev, &channel_fops); //初始化字符設備
cdev.owner = THIS_MODULE;
cdev_add(&cdev, MKDEV(channel_major, 0), CHANNEL_NR_DEVS); //添加到字符設備中
channel_devp = kmalloc(CHANNEL_NR_DEVS *sizeof(struct channel), GFP_KERNEL); //為 我們的buffer 分配一塊空間
if (!channel_devp) {
reslut = -ENOMEM;
goto fail_malloc;
}
memset(channel_devp, 0, sizeof(struct channel));
for (i = 0; i < CHANNEL_NR_DEVS; i++) {
channel_devp[i].size = CHANNEL_SIZE;
channel_devp[i].data = kmalloc(CHANNEL_SIZE, GFP_KERNEL);
memset(channel_devp[i].data, 0, CHANNEL_SIZE);
#if ENABLE_POLL
init_waitqueue_head(&(channel_devp[i].inq));
#endif
}
printk(KERN_INFO "ntychannel_init");
return 0;
fail_malloc:
unregister_chrdev_region(devno, 1);
return reslut;
}
static void channel_exit(void) {
printk(KERN_INFO "channel_exit");
cdev_del(&cdev);
kfree(channel_devp);
unregister_chrdev_region(MKDEV(channel_major, 0), 2);
}
MODULE_AUTHOR("birate");
MODULE_LICENSE("GPL");
module_init(channel_init); // 設備初始化
module_exit(channel_exit); //設備退出
編寫Makefile文件:
obj-m += channel.o
KERNELDIR ?= /lib/modules/$(shell uname -r)/build
all:
make -C $(KERNELDIR) M=$(PWD) modules
clean:
make -C $(KERNELDIR) M=$(PWD) clean
KERNELDIR ?= /lib/modules/$(shell uname -r)/build
all:
make -C $(KERNELDIR) M=$(PWD) modules
clean:
make -C $(KERNELDIR) M=$(PWD) clean
- 使用 make 命令。編譯出我們需要的channel.ko文件。
- 使用 insmod channel.ko, 向kernel中插入 我們的module
- 使用mknod /dev/channel c 96 0, 創建一個/dev/channel 的字符設備,主設備號為96,次設備號為0;
編寫我們的應用程序:
channel_app.c
#include
#include
#include
#include
#include
#include
#include
#include
#include
#define BUFFER_LENGTH 128
int main () {
int fd = open("/dev/channel", O_RDWR);
if (fd < 0) {
printf("open failed: errno : %sn", strerror(errno));
return -1;
}
char *buffer = (char *)malloc(BUFFER_LENGTH);
memset(buffer, 0, BUFFER_LENGTH);
char *start = mmap(NULL, BUFFER_LENGTH, PROT_READ | PROT_WRITE, MAP_SHARED, fd, 0);
fd_set rds;
FD_ZERO(&rds);
FD_SET(fd, &rds);
while(1) {
int ret = select(fd+1, &rds, NULL, NULL, NULL);
if (ret < 0) {
printf("select errorn");
exit(1);
}
if (FD_ISSET(fd, &rds)) {
#if 0
strcpy(buffer, start);
printf("channel: %sn", buffer);
#else
read(fd, buffer, BUFFER_LENGTH);
printf("channel: %sn", buffer);
#endif
}
}
munmap(start, BUFFER_LENGTH);
free(buffer);
close(fd);
return 0;
}
#include
#include
#include
#include
#include
#include
#include
#include
#define BUFFER_LENGTH 128
int main () {
int fd = open("/dev/channel", O_RDWR);
if (fd < 0) {
printf("open failed: errno : %sn", strerror(errno));
return -1;
}
char *buffer = (char *)malloc(BUFFER_LENGTH);
memset(buffer, 0, BUFFER_LENGTH);
char *start = mmap(NULL, BUFFER_LENGTH, PROT_READ | PROT_WRITE, MAP_SHARED, fd, 0);
fd_set rds;
FD_ZERO(&rds);
FD_SET(fd, &rds);
while(1) {
int ret = select(fd+1, &rds, NULL, NULL, NULL);
if (ret < 0) {
printf("select errorn");
exit(1);
}
if (FD_ISSET(fd, &rds)) {
#if 0
strcpy(buffer, start);
printf("channel: %sn", buffer);
#else
read(fd, buffer, BUFFER_LENGTH);
printf("channel: %sn", buffer);
#endif
}
}
munmap(start, BUFFER_LENGTH);
free(buffer);
close(fd);
return 0;
}
應用程序很簡單,我們使用 gcc -o channel_app channel_app.c , 編譯出可執行文件,在一個進程中執行channel_app, 另一個進程使用echo " " > /dev/channel 去向設備文件中寫就可以了。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
數據
+關注
關注
8文章
7246瀏覽量
91251 -
通信
+關注
關注
18文章
6183瀏覽量
137458 -
Linux
+關注
關注
87文章
11473瀏覽量
212988 -
字符
+關注
關注
0文章
234瀏覽量
25500 -
組件
+關注
關注
1文章
531瀏覽量
18332
發布評論請先 登錄
相關推薦
熱點推薦
linux操作系統下的進程通信設計
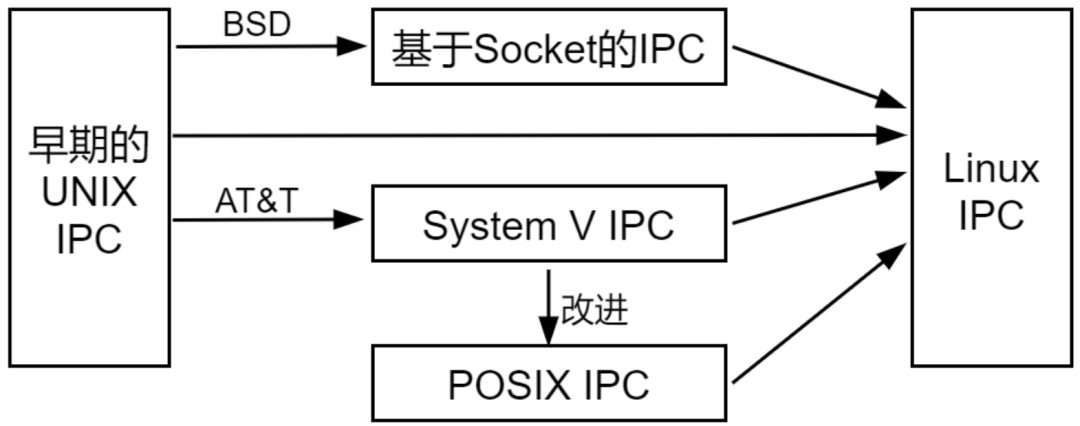
)的進程間通信機制。Linux則把兩者繼承了下來,如圖示:其中,最初Unix IPC包括:管道、FIFO、信號;System V IPC包括
發表于 04-16 09:17
【Linux學習雜談】之進程通信
本帖最后由 michael_llh 于 2016-10-17 13:14 編輯
我們在Linux應用編程當中如果需要用到多個進程來完成一個任務的話那么我們就沒有辦法避開進程
發表于 10-15 14:45
Linux現有的所有進程間IPC方式
在開始回答前,先簡單概括性地說說Linux現有的所有進程間IPC方式:1. **管道:**在創建時分配一個page大小的內存,緩存區大小比較有限;2. 消息隊列:信息復制兩次,額外的C
發表于 08-20 06:17
進程間通信之Linux下進程間通信概述
人們現在廣泛使用的手機等方式。本章就是講述如何建立這些不同的通話方式,就像人們有多種通信方式一樣。 Linux下的進程通信手段基本上是從UN
發表于 10-18 16:21
?0次下載





 工商網監
工商網監
評論