") 靜電致動-電介質(zhì)-軟體機器人介紹
靜電致動-電介質(zhì)-軟體機器人介紹
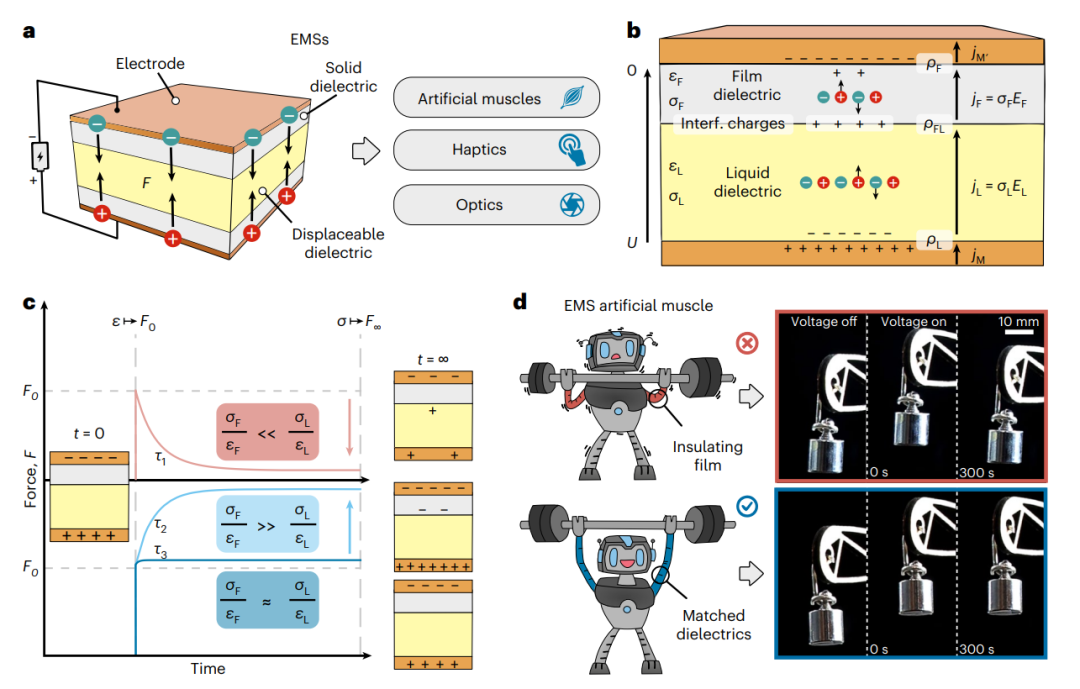
在諸如軟體機器人的應(yīng)用中,靜電多層系統(tǒng)Electrostatic multilayer systems,通常采用聚合物薄膜與可移動的絕緣流體相結(jié)合,從而實現(xiàn)致動。
在高電場的驅(qū)動下,在功率密度、驅(qū)動應(yīng)變和速度方面,靜電多層系統(tǒng)提供了強大的性能,但由于界面充電,從而遭受快速的力學(xué)衰減。驅(qū)動電壓的高頻極性反轉(zhuǎn)是一種補救措施,但是涉及較大的功率消耗和不利的力學(xué)振蕩。
近日,意大利特倫托大(University of Trento) Ion-Dan S?rbu等, 奧地利開普勒大學(xué)(Johannes Kepler University) David Preninger,Martin Kaltenbrunner等,在Nature Electronics上發(fā)文,報道了固體/液體電介質(zhì)多層堆疊中的力行為理論和實驗框架,并獨立于致動器設(shè)計,僅基于其介電特性。
基于該模型,開發(fā)了基于材料的解決方案,該解決方案依賴于匹配組成電介質(zhì)的體電荷弛豫速率,用于各種軟致動器系統(tǒng):可調(diào)透鏡、人造肌肉和觸覺設(shè)備。在恒定電壓操作下,該方法提供了不確定的、穩(wěn)定的力輸出,與不匹配的材料組合相比,功率損耗減少了1000倍。
 ?
?
圖1:軟靜電多層系統(tǒng)Electrostatic multilayered systems,EMS。
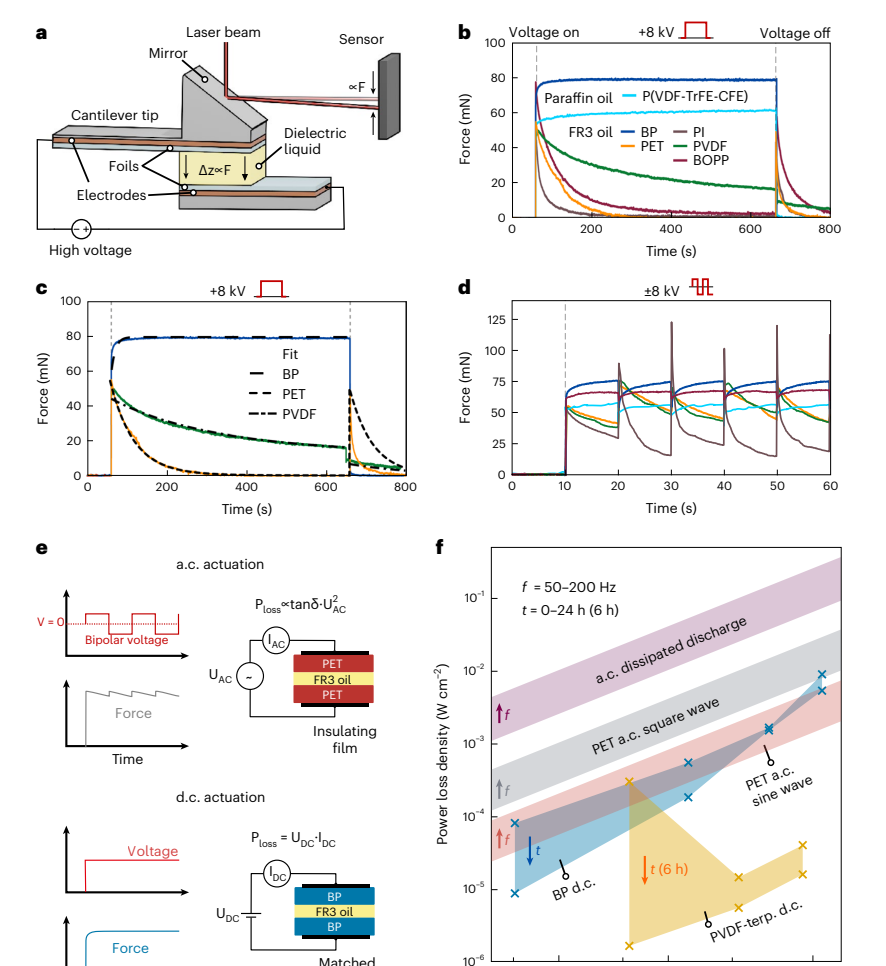
圖2:在靜電多層系統(tǒng)EMSs中,力學(xué)變化和功率損耗測量。
 ?
?
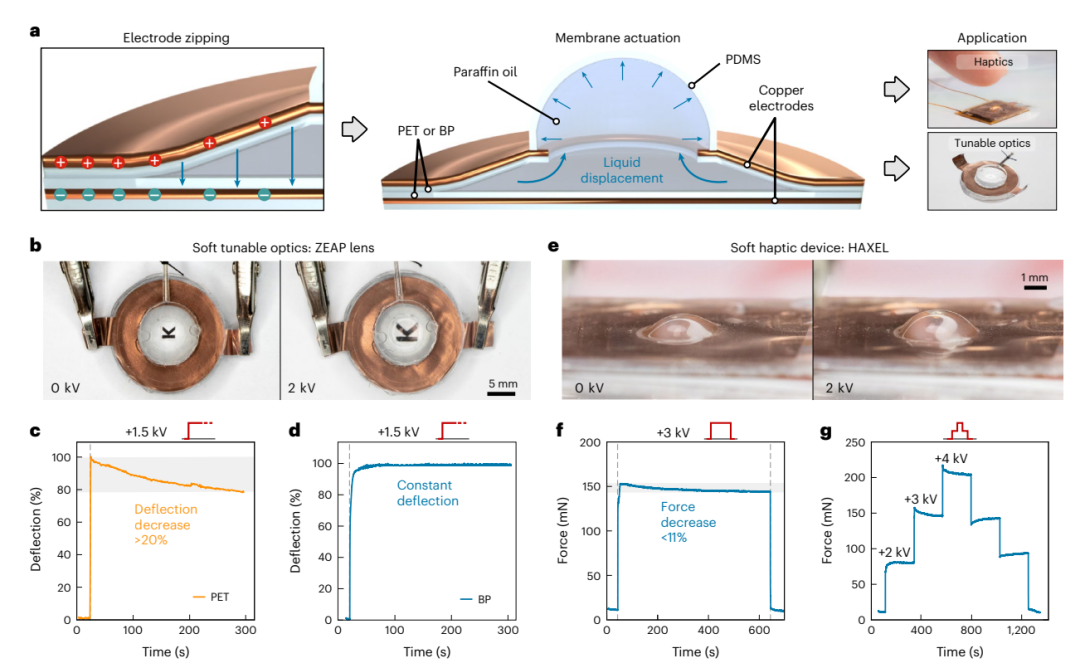
圖3:電活性聚合物zipping electroactive polymer, ZEAP透鏡和液壓放大的紫杉醇hydraulically amplified taxels, HAXEL致動器。
 ?
?
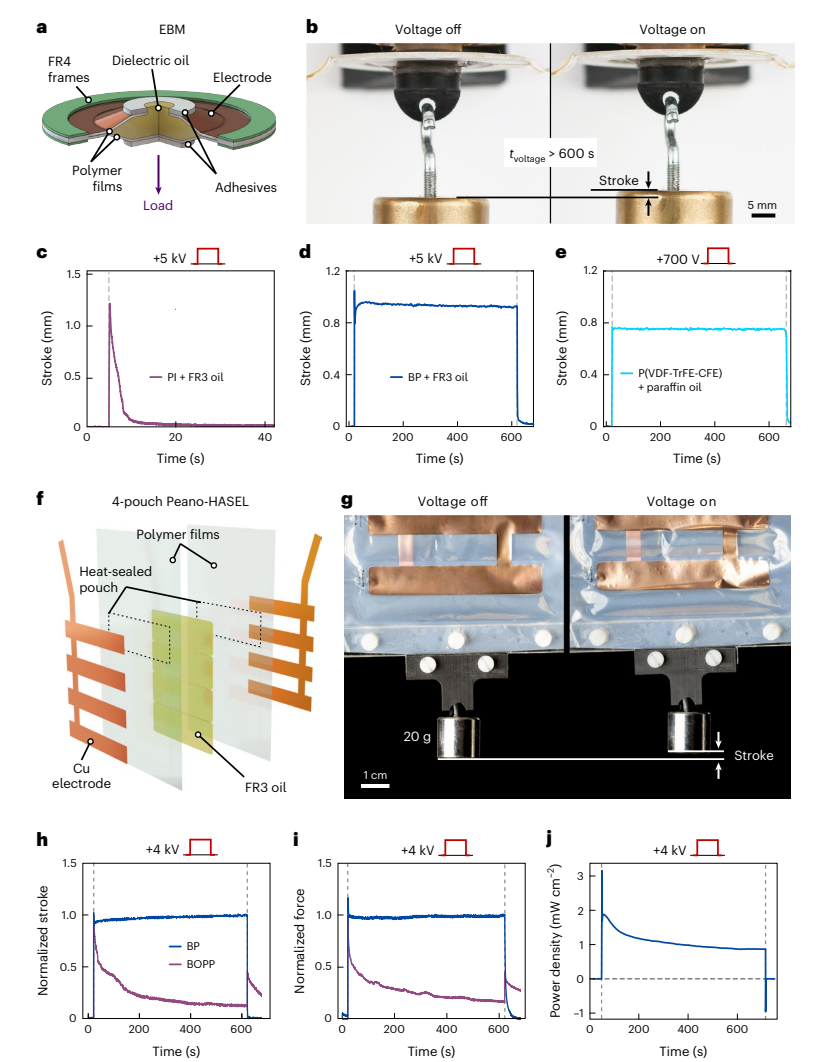
圖4: 靜電波紋肌肉Electrostatic bellow muscles, EBM和皮亞諾液壓放大自愈靜電Peano-hydraulically amplified self-healing electrostatic, Peano-HASEL人工肌肉。
審核編輯:劉清
-
機器人
+關(guān)注
關(guān)注
213文章
29568瀏覽量
211946 -
軟體機器人
+關(guān)注
關(guān)注
1文章
113瀏覽量
11941
原文標(biāo)題:Nature Electronics|靜電致動-電介質(zhì)-軟體機器人
文章出處:【微信號:robotmagazine,微信公眾號:機器人技術(shù)與應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
盤點#機器人開發(fā)平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】視覺實現(xiàn)的基礎(chǔ)算法的應(yīng)用
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】機器人入門的引路書
Aigtek高光回顧!第二十屆全國電介質(zhì)物理、材料與應(yīng)用學(xué)術(shù)會議!

清華大學(xué):軟體機器人柔性傳感技術(shù)最新研究進展

【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
【「具身智能機器人系統(tǒng)」閱讀體驗】1.初步理解具身智能
高壓放大器在水下?lián)湟?b class='flag-5'>軟體機器人研究中的應(yīng)用

鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示
高壓放大器在軟體機器人特性測試中的應(yīng)用

ATA-7030高壓放大器在電致變形柔性致動器表情機器人實驗中的應(yīng)用

高壓放大器在介電彈性體折紙術(shù)軟體機器人中的應(yīng)用

清華大學(xué):軟體機器人柔性傳感技術(shù)最新研究進展






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論