") 電源管理入門-Regulator驅(qū)動是什么?Regulator的作用是什么?
電源管理入門-Regulator驅(qū)動是什么?Regulator的作用是什么?

1. Regulator驅(qū)動是什么?
Regulator是Linux系統(tǒng)中電源管理的基礎(chǔ)設(shè)施之一,用于穩(wěn)壓電源的管理,是各種驅(qū)動子系統(tǒng)中設(shè)置 電壓的標(biāo)準(zhǔn)接口。前面介紹的CPUFreq驅(qū)動就經(jīng)常使用它來設(shè)定電壓。分為voltage regulator(電壓調(diào)節(jié)器)和current(電流調(diào)節(jié)器)。一般電源管理芯片(Power Management IC)中會包含一個甚至多個regulator。
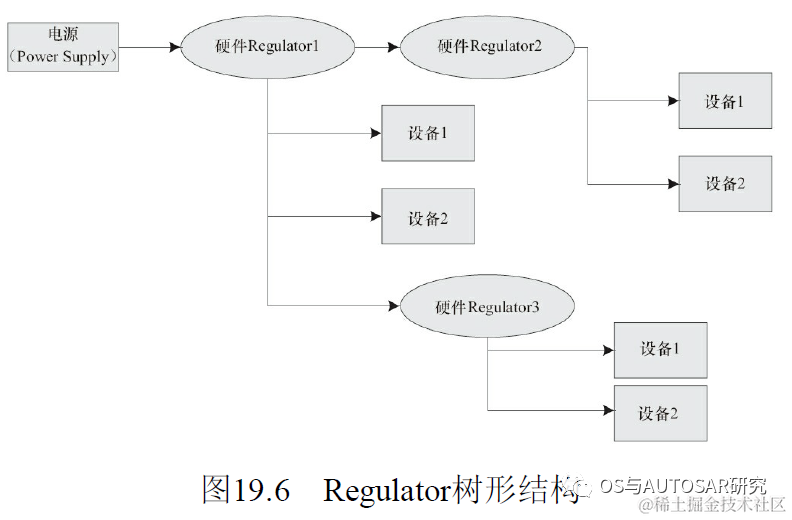
而Regulator則可以管理系統(tǒng)中的供電單元,即穩(wěn)壓器(Low Dropout Regulator,LDO,即低壓差線性 穩(wěn)壓器),并提供獲取和設(shè)置這些供電單元電壓的接口。一般在ARM電路板上,各個穩(wěn)壓器和設(shè)備會形 成一個Regulator樹形結(jié)構(gòu),
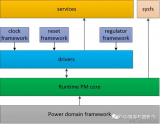
Regulator的作用是什么?
通常的作用是給電子設(shè)備供電。大多數(shù)regulator可以啟用(enable)和禁用(disable)其輸出,同時也可以控制其輸出電壓(voltage)和電流(current)。
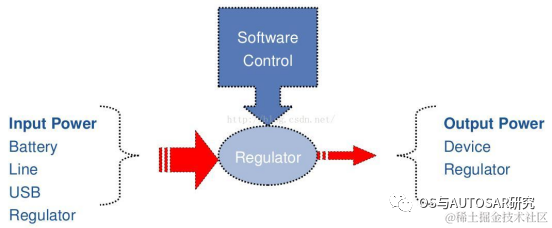
從上圖可以看出,input power會經(jīng)過 regulator 轉(zhuǎn)化為output power,regulator可以做如下的約束:
Voltage control: 限制輸出的電壓
Current limiting: 限制最大輸出電流
Power switch: 可以控制電壓enable/disable
Power Domain
電源域由穩(wěn)壓器、開關(guān)或其他電源域的輸出電源提供其輸入電源的電子電路。電源Regulator可能位于一個或多個開關(guān)后面,例如:
Regulator -+-> Switch-1 -+-> Switch-2 --> [Consumer A]
| |
| +-> [Consumer B], [Consumer C]
|
+-> [Consumer D], [Consumer E]
這是一個穩(wěn)壓器和三個電源域:
Domain 1: Switch-1, Consumers D & E. Domain 2: Switch-2, Consumers B & C. Domain 3: Consumer A.
Regulator電壓設(shè)計時的約束:
穩(wěn)壓器級別:這由穩(wěn)壓器硬件操作參數(shù)定義,并在穩(wěn)壓器數(shù)據(jù)表中指定,例如:``` 電壓輸出范圍為 800mV -> 3500mV 穩(wěn)壓器電流輸出限制為 20mA @ 5V,但為 10mA @ 10V
功率域級別:這是由內(nèi)核級板初始化代碼在軟件中定義的。它用于將功率域限制在特定的功率范圍內(nèi),例如:Domain-2 電壓為 1400mV -> 1600mV
Consumer級別:這是由Consumer驅(qū)動程序動態(tài)設(shè)置電壓或電流限制級別定義的。例如 消費類背光驅(qū)動器要求將電流從 5mA 增加到 10mA,以增加 LCD 亮度。
2. Regulator框架介紹
Linux regulator framework的主要目的:
提供標(biāo)準(zhǔn)的內(nèi)核接口,控制系統(tǒng)的voltage/current regulators,并提供相應(yīng)的開關(guān)、大小設(shè)置的機制。
在系統(tǒng)運行的過程中,根據(jù)具體的需要動態(tài)改變regulators的輸出,從而達(dá)到省電的目的。
在系統(tǒng)中如果配錯regulator是比較危險的,可能會造成硬件器件的損壞。因此,需要在regulator framework中對電流或者電壓的大小做限定,并且不能被ragulator的consumer或者provider更改。
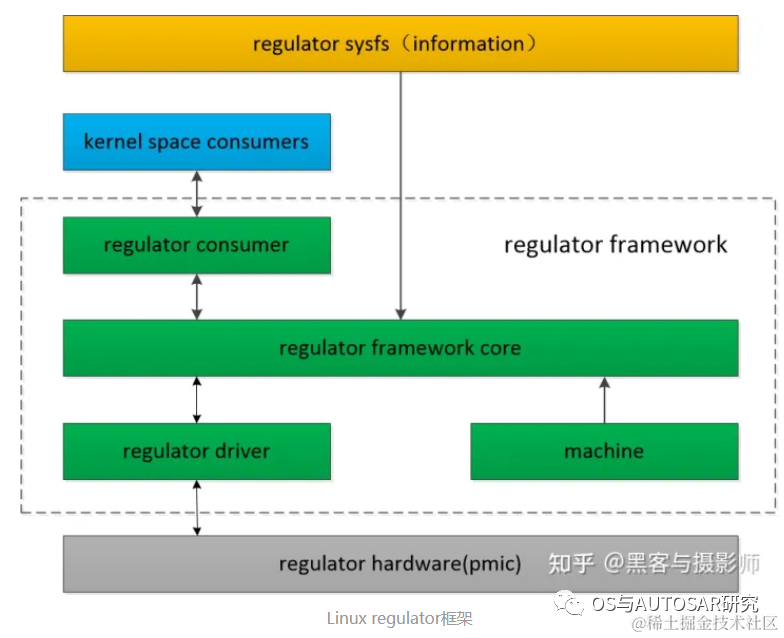
2.1 regulator consumer
regulator consumer抽象出regulator設(shè)備(struct regulator),并提供regulator操作相關(guān)的接口。包括:regulator_get/regulator_put/regulator_enable/regulator_disable/ regulator_set_voltage/regulator_get_voltage等。
2.2 regulator core
regulator core負(fù)責(zé)上述regulator driver/consumer/machine邏輯的具體實現(xiàn),對底層的硬件進(jìn)行封裝,并提供接口給內(nèi)核中其他的consumer(使用當(dāng)前regulator設(shè)備的驅(qū)動)提供操作接口,并以sysfs的形式,向用戶空間提供接口。
2.3 regulator driver
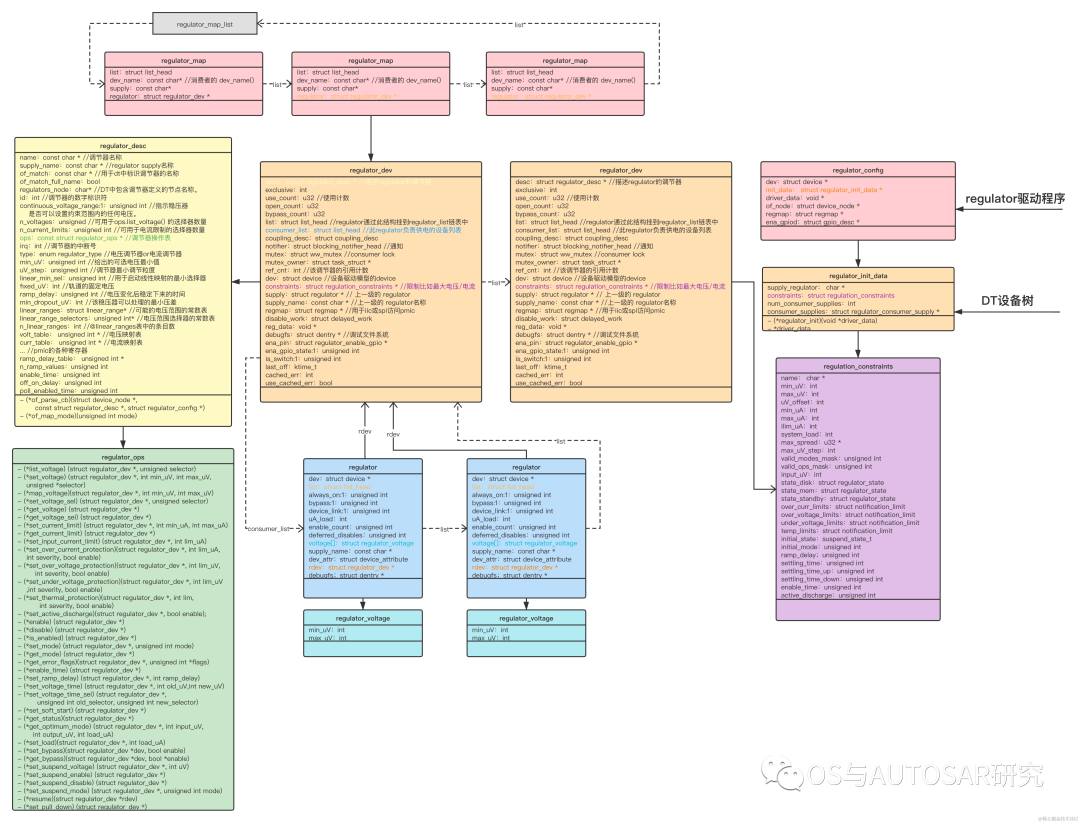
regulator driver指的是regulator設(shè)備的驅(qū)動,主要包含如下結(jié)構(gòu):
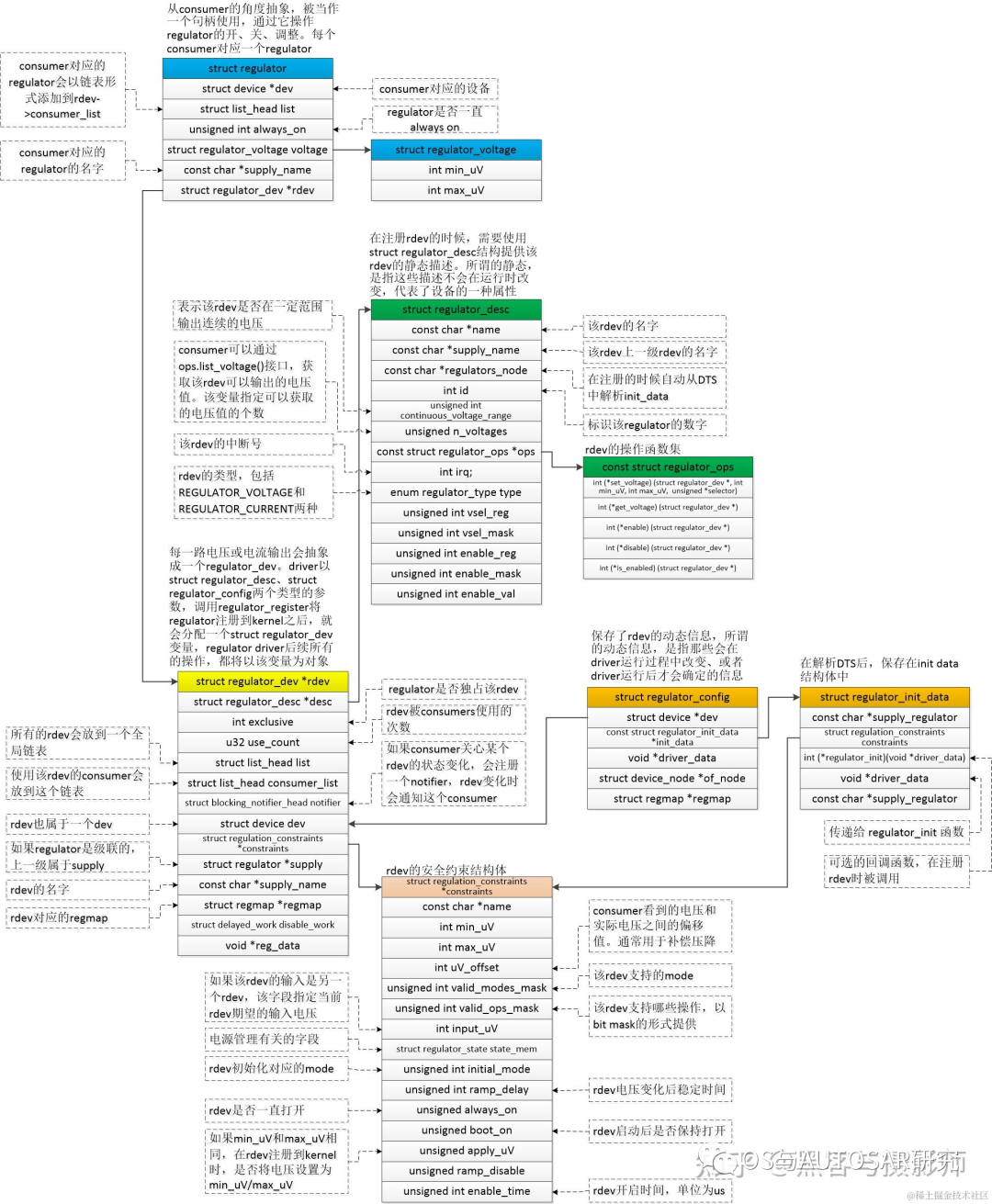
1)使用struct regulator_desc,描述regulator的靜態(tài)信息,包括:名字、supply regulator的名字、中斷號、操作函數(shù)集(struct regulator_ops)、使用regmap時相應(yīng)的寄存器即bitmap等。
2)使用struct regulator_config,描述regulator的動態(tài)信息(所謂的動態(tài)信息,體現(xiàn)在struct regulator_config變量都是局部變量,因此不會永久保存),包括struct regulator_init_data指針、設(shè)備指針、enable gpio等。
3)提供regulator的注冊接口(regulator_register/devm_regulator_register),該接口接受描述該regulator的兩個變量的指針:struct regulator_desc和struct regulator_config,并分配一個新的數(shù)據(jù)結(jié)構(gòu)(struct regulator_dev,從設(shè)備的角度描述regulator),并把靜態(tài)指針(struct regulator_desc)和動態(tài)指針(struct regulator_config)提供的信息保存在其中。
4)regulator driver以struct regulator_dev(代表設(shè)備)指針為對象,對regulator進(jìn)行后續(xù)的操作。
3. DTS配置文件及初始化
例如:arch/arm/boot/dts/100ask_imx6ull_qemu.dts中
regulators {
compatible = "simple-bus";
#address-cells = <1>;
#size-cells = <0>;
reg_can_3v3: regulator@0 {
compatible = "regulator-fixed";
reg = <0>;
regulator-name = "can-3v3";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
/*gpios = <&gpio_spi 3 GPIO_ACTIVE_LOW>;*/
};
subsys_initcall(regulator_fixed_voltage_init); //系統(tǒng)啟動時候執(zhí)行
--》platform_driver_register(®ulator_fixed_voltage_driver);
static struct platform_driver regulator_fixed_voltage_driver = {
.probe = reg_fixed_voltage_probe,
.driver = {
.name = "reg-fixed-voltage",
.of_match_table = of_match_ptr(fixed_of_match),
.pm = ®_fixed_voltage_pm_ops,
},
};
reg_fixed_voltage_probe --》devm_regulator_register(&pdev->dev, &drvdata->desc, &cfg); --》rdev = regulator_register(regulator_desc, config);
regulator_ops指針ops是對這個穩(wěn)壓器硬件操作的封裝,其中包含獲取、設(shè)置電壓等的成員函數(shù)
//穩(wěn)壓器硬件操作的封裝,其中包含獲取、設(shè)置電壓等
struct regulator_ops {
/* enumerate supported voltages */
int (*list_voltage) (struct regulator_dev *, unsigned selector);
/* get/set regulator voltage */
int (*set_voltage) (struct regulator_dev *, int min_uV, int max_uV,
unsigned *selector);
int (*map_voltage)(struct regulator_dev *, int min_uV, int max_uV);
int (*set_voltage_sel) (struct regulator_dev *, unsigned selector);
int (*get_voltage) (struct regulator_dev *);
int (*get_voltage_sel) (struct regulator_dev *);
/* get/set regulator current */
int (*set_current_limit) (struct regulator_dev *,
int min_uA, int max_uA);
int (*get_current_limit) (struct regulator_dev *);
int (*set_input_current_limit) (struct regulator_dev *, int lim_uA);
int (*set_over_current_protection) (struct regulator_dev *);
int (*set_active_discharge) (struct regulator_dev *, bool enable);
/* enable/disable regulator */
int (*enable) (struct regulator_dev *);
int (*disable) (struct regulator_dev *);
int (*is_enabled) (struct regulator_dev *);
/* get/set regulator operating mode (defined in consumer.h) */
int (*set_mode) (struct regulator_dev *, unsigned int mode);
unsigned int (*get_mode) (struct regulator_dev *);
/* Time taken to enable or set voltage on the regulator */
int (*enable_time) (struct regulator_dev *);
int (*set_ramp_delay) (struct regulator_dev *, int ramp_delay);
int (*set_voltage_time) (struct regulator_dev *, int old_uV,
int new_uV);
int (*set_voltage_time_sel) (struct regulator_dev *,
unsigned int old_selector,
unsigned int new_selector);
int (*set_soft_start) (struct regulator_dev *);
/* report regulator status ... most other accessors report
* control inputs, this reports results of combining inputs
* from Linux (and other sources) with the actual load.
* returns REGULATOR_STATUS_* or negative errno.
*/
int (*get_status)(struct regulator_dev *);
/* get most efficient regulator operating mode for load */
unsigned int (*get_optimum_mode) (struct regulator_dev *, int input_uV,
int output_uV, int load_uA);
/* set the load on the regulator */
int (*set_load)(struct regulator_dev *, int load_uA);
/* control and report on bypass mode */
int (*set_bypass)(struct regulator_dev *dev, bool enable);
int (*get_bypass)(struct regulator_dev *dev, bool *enable);
/* the operations below are for configuration of regulator state when
* its parent PMIC enters a global STANDBY/HIBERNATE state */
/* set regulator suspend voltage */
int (*set_suspend_voltage) (struct regulator_dev *, int uV);
/* enable/disable regulator in suspend state */
int (*set_suspend_enable) (struct regulator_dev *);
int (*set_suspend_disable) (struct regulator_dev *);
/* set regulator suspend operating mode (defined in consumer.h) */
int (*set_suspend_mode) (struct regulator_dev *, unsigned int mode);
int (*set_pull_down) (struct regulator_dev *);
};
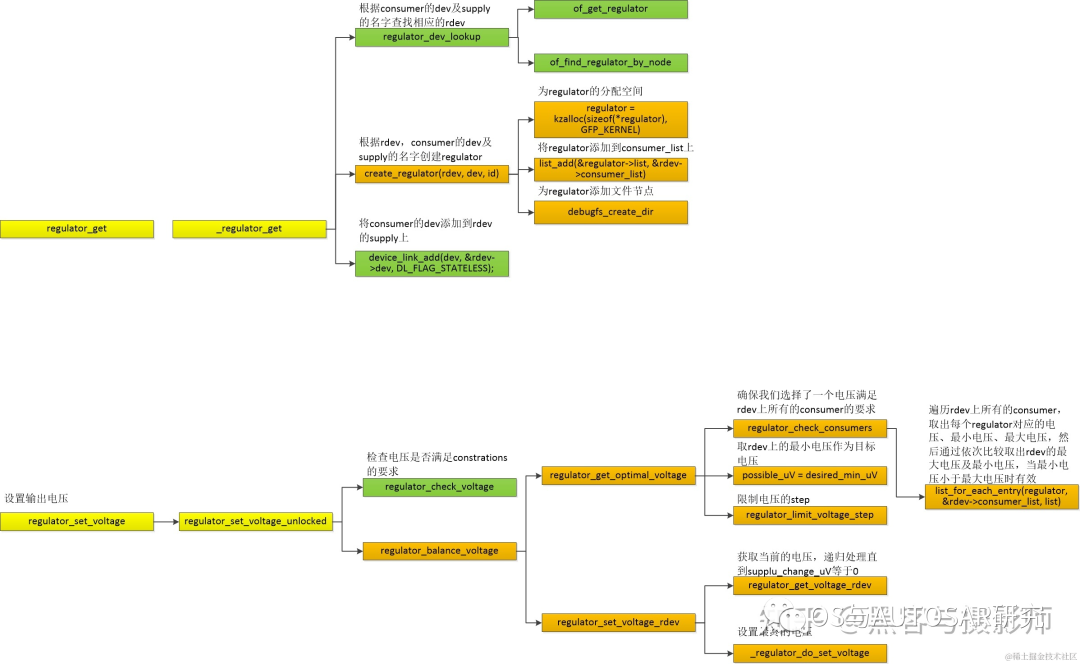
4. 運行時調(diào)用
調(diào)壓前要先獲取regulator handle,然后利用regulator_set_voltage進(jìn)行調(diào)壓
5. Consumer API
5.1 Consumer Regulator Access (static & dynamic drivers)
消費者驅(qū)動程序可以通過調(diào)用regulator_get訪問其供應(yīng)調(diào)節(jié)器:
regulator = regulator_get(dev, "Vcc");
消費者傳入其結(jié)構(gòu)設(shè)備指針和電源 ID。然后內(nèi)核通過查詢特定于機器的查找表找到正確的調(diào)節(jié)器。如果查找成功,則此調(diào)用將返回一個指向提供此使用者的結(jié)構(gòu)調(diào)節(jié)器的指針。
要釋放調(diào)節(jié)器,消費者驅(qū)動程序應(yīng)調(diào)用:
regulator_put(regulator);
消費者可以由多個調(diào)節(jié)器供電,例如 具有模擬和數(shù)字電源的編解碼器消費者:
digital = regulator_get(dev, "Vcc"); /* digital core */ analog = regulator_get(dev, "Avdd"); /* analog */
調(diào)節(jié)器訪問函數(shù)regulator_get() 和regulator_put() 通常會分別在您的設(shè)備驅(qū)動程序probe() 和remove() 中調(diào)用。
5.2 Regulator Output Enable & Disable (static & dynamic drivers)
消費者可以通過調(diào)用regulator_enable啟用調(diào)節(jié)器:
int regulator_enable(regulator);
在調(diào)用regulator_enabled() 之前,電源可能已經(jīng)啟用。如果消費者共享調(diào)節(jié)器或調(diào)節(jié)器先前已由引導(dǎo)加載程序或內(nèi)核板初始化代碼啟用,則可能會發(fā)生這種情況。消費者可以通過調(diào)用regulator_is_enabled判斷是否啟用了調(diào)節(jié)器:
int regulator_is_enabled(regulator);
當(dāng)調(diào)節(jié)器啟用時,這將返回大于零。消費者可以在不再需要時通過調(diào)用禁用其供應(yīng):
int regulator_disable(regulator);
如果它與其他消費者共享,這可能不會禁用供應(yīng)。僅當(dāng)啟用的參考計數(shù)為零時,才會禁用調(diào)節(jié)器。最后,在緊急情況下可以強制禁用調(diào)節(jié)器:
int regulator_force_disable(regulator);
這將立即強制關(guān)閉穩(wěn)壓器輸出。所有消費者都將斷電。
5.3 Regulator Voltage Control & Status (dynamic drivers)
一些消費類驅(qū)動器需要能夠動態(tài)改變其電源電壓以匹配系統(tǒng)工作點。例如 CPUfreq 驅(qū)動程序可以隨頻率調(diào)整電壓以節(jié)省電量,SD 驅(qū)動程序可能需要選擇正確的卡電壓等。
消費者可以通過調(diào)用來控制他們的電源電壓:
int regulator_set_voltage(regulator, min_uV, max_uV);
其中 min_uV 和 max_uV 是以微伏為單位的最小和最大可接受電壓。這可以在調(diào)節(jié)器啟用或禁用時調(diào)用。如果在已啟用regulator時調(diào)用,則電壓會立即更改,否則電壓配置會更改,并且在下一次啟用穩(wěn)壓器時會物理設(shè)置電壓。調(diào)節(jié)器配置的電壓輸出可以通過調(diào)用找到:
int regulator_get_voltage(regulator);
無論調(diào)節(jié)器是啟用還是禁用,get_voltage() 都將返回配置的輸出電壓,并且不應(yīng)用于確定調(diào)節(jié)器輸出狀態(tài)。然而,這可以與 is_enabled() 結(jié)合使用來確定穩(wěn)壓器物理輸出電壓。
5.4 Regulator Current Limit Control & Status (dynamic drivers)
一些消費類驅(qū)動程序需要能夠動態(tài)更改其電源電流限制以匹配系統(tǒng)工作點。例如 LCD 背光驅(qū)動程序可以更改電流限制以改變背光亮度,USB 驅(qū)動程序可能希望在供電時將限制設(shè)置為 500mA。消費者可以通過調(diào)用來控制他們的電源電流限制:
int regulator_set_current_limit(regulator, min_uA, max_uA);
其中 min_uA 和 max_uA 是以微安為單位的最小和最大可接受電流限制。
這可以在調(diào)節(jié)器啟用或禁用時調(diào)用。如果在已啟用電流限制時調(diào)用,則電流限制會立即更改,否則電流限制配置會更改,并且在下一次啟用調(diào)節(jié)器時會設(shè)置電流限制。
通過調(diào)用可以找到調(diào)節(jié)器電流限制:
int regulator_get_current_limit(regulator);
無論調(diào)節(jié)器是啟用還是禁用,get_current_limit() 都將返回電流限制,并且不應(yīng)用于確定調(diào)節(jié)器電流負(fù)載。
5.5 Regulator Operating Mode Control & Status (dynamic drivers)
一些消費者可以通過改變其電源調(diào)節(jié)器的工作模式來進(jìn)一步節(jié)省系統(tǒng)功率,以便在消費者工作狀態(tài)發(fā)生變化時提高效率。例如 消費者驅(qū)動程序空閑,隨后消耗較少的電流.調(diào)節(jié)器操作模式可以間接或直接改變。
間接操作模式控制 消費者驅(qū)動程序可以通過以下調(diào)用請求更改其電源調(diào)節(jié)器操作模式:
int regulator_set_load(struct regulator *regulator, int load_uA);
這將導(dǎo)致core重新計算調(diào)節(jié)器上的總負(fù)載(基于其所有消費者)并更改操作模式(如果必要和允許)以最佳匹配當(dāng)前操作負(fù)載。load_uA 值可以從消費者的數(shù)據(jù)表中確定。例如 大多數(shù)數(shù)據(jù)表都有表格顯示在某些情況下消耗的最大電流。大多數(shù)消費者將使用間接操作模式控制,因為他們不了解調(diào)節(jié)器或調(diào)節(jié)器是否與其他消費者共享
直接操作模式控制 定制或緊密耦合的驅(qū)動器可能希望根據(jù)其工作點直接控制調(diào)節(jié)器的工作模式, 這可以通過調(diào)用:
int regulator_set_mode(struct regulator *regulator, unsigned int mode); unsigned int regulator_get_mode(struct regulator *regulator); 直接模式將僅由了解有關(guān)調(diào)節(jié)器且不與其他消費者共享調(diào)節(jié)器的消費者使用
5.6 Regulator Events
監(jiān)管機構(gòu)可以將外部事件通知消費者, 在監(jiān)管機構(gòu)壓力或故障條件下,消費者可能會收到事件。消費者調(diào)用以下接口注冊感興趣的事件:
int regulator_register_notifier(struct regulator *regulator, struct notifier_block *nb); 消費者調(diào)用以下接口反注冊感興趣的事件:
int regulator_unregister_notifier(struct regulator *regulator, struct notifier_block *nb); 監(jiān)管機構(gòu)使用內(nèi)核通知程序框架向感興趣的消費者發(fā)送事件。
5.7 Regulator Direct Register Access
某些類型的電源管理硬件或固件被設(shè)計為需要對調(diào)節(jié)器進(jìn)行低級硬件訪問,而無需內(nèi)核參與,此類設(shè)備的示例有:
帶有壓控振蕩器和控制邏輯的時鐘源,可通過 I2C 改變電源電壓,以實現(xiàn)所需的輸出時鐘速率 熱管理固件,可發(fā)出任意 I2C 事務(wù)以在過熱條件下執(zhí)行系統(tǒng)斷電 要設(shè)置這樣的設(shè)備/固件,需要為其配置各種參數(shù),例如調(diào)節(jié)器的 I2C 地址、各種調(diào)節(jié)器寄存器的地址等。監(jiān)管者框架提供了以下查詢這些詳細(xì)信息的幫助程序。
特定于總線的詳細(xì)信息,例如 I2C 地址或傳輸速率,由 regmap 框架處理。要獲取監(jiān)管機構(gòu)的 regmap(如果支持),請使用:
struct regmap *regulator_get_regmap(struct regulator *regulator); 要獲取穩(wěn)壓器電壓選擇器寄存器的硬件寄存器偏移量和位掩碼,請使用:
int regulator_get_hardware_vsel_register(struct regulator *regulator, unsigned *vsel_reg, unsigned *vsel_mask); 要將調(diào)節(jié)器框架電壓選擇器代碼(由調(diào)節(jié)器列表電壓使用)轉(zhuǎn)換為可直接寫入電壓選擇器寄存器的特定于硬件的電壓選擇器,請使用:
int regulator_list_hardware_vsel(struct regulator *regulator, unsigned selector);
6. Driver Interface
驅(qū)動程序可以通過調(diào)用以下接口注冊Regulator:struct regulator_dev *regulator_register(struct regulator_desc *regulator_desc, const struct regulator_config *config); 這會將regulator的能力和操作注冊到regulator核心。注銷接口如下:void regulator_unregister(struct regulator_dev *rdev);
調(diào)節(jié)器可以通過調(diào)用以下方式向消費者驅(qū)動程序發(fā)送事件(例如過熱、欠壓等):int regulator_notifier_call_chain(struct regulator_dev *rdev, unsigned long event, void *data)
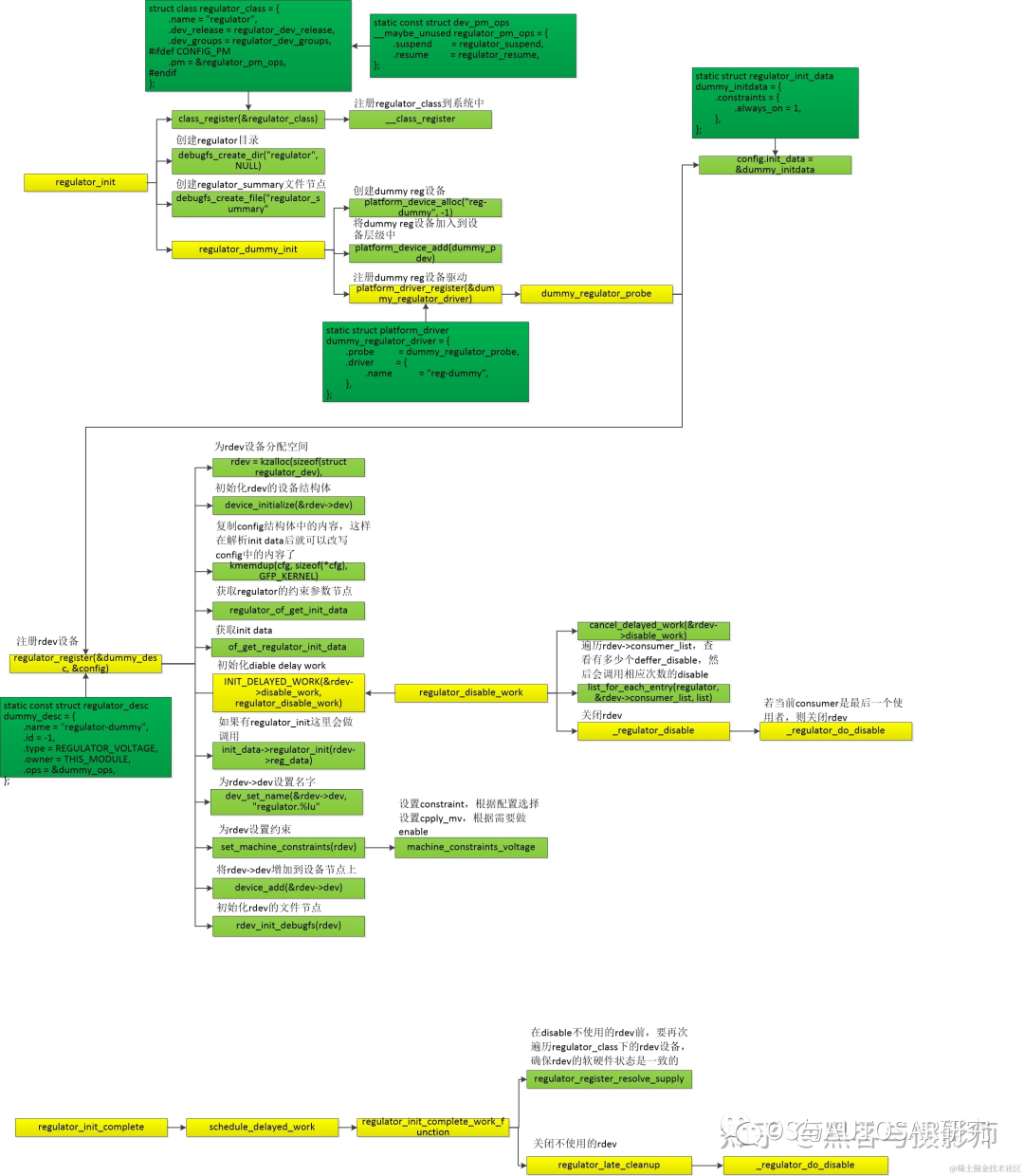
最后來個大圖:
審核編輯:劉清
-
穩(wěn)壓器
+關(guān)注
關(guān)注
24文章
4681瀏覽量
96170 -
電源管理
+關(guān)注
關(guān)注
117文章
6437瀏覽量
146122 -
Linux系統(tǒng)
+關(guān)注
關(guān)注
4文章
605瀏覽量
28617 -
輸出電壓
+關(guān)注
關(guān)注
2文章
1709瀏覽量
39319 -
電壓調(diào)節(jié)器
+關(guān)注
關(guān)注
3文章
154瀏覽量
18356
原文標(biāo)題:電源管理入門-11Regulator驅(qū)動
文章出處:【微信號:OS與AUTOSAR研究,微信公眾號:OS與AUTOSAR研究】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
電源管理入門:驅(qū)動Runtime PM管理
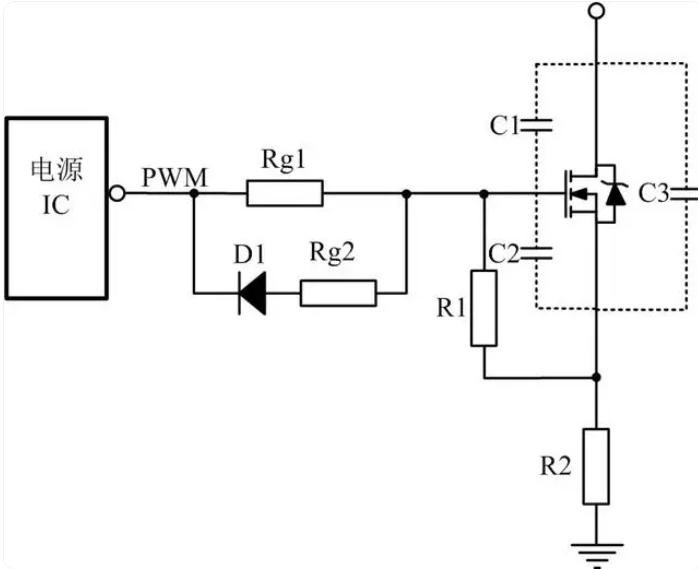
電源驅(qū)動ic的作用是什么 電源IC驅(qū)動電路設(shè)計圖
用STM8-MC_KIT庫來控制BLDC電機,如何調(diào)用PI_Regulator()函數(shù)??
學(xué)習(xí)嵌入式小白基于4412修改電源管理芯片8767電壓輸出
迅為4412開發(fā)板-驅(qū)動-電源管理芯片S5M8767修改輸出例程
如何使用Linux regulator系統(tǒng)通過一個GPIO控制外部IC的電源
電源管理芯片的regulator用法有哪些呢
電源管理regulator分成哪幾種?怎樣去使用呢
Protecting Super LDO Regulator
Buck Regulator Generates Ultra
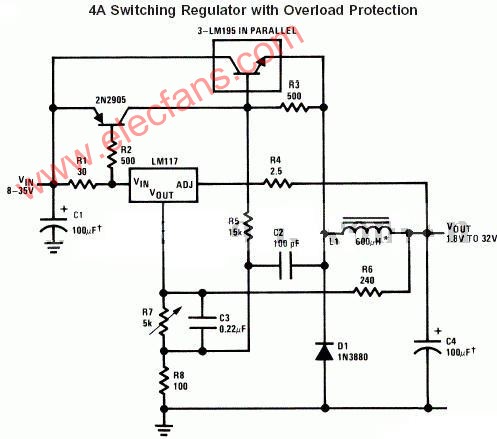
4A switching regulator with ov
高通平臺電源管理regulator介紹

[Linux 驅(qū)動] -- 電源管理芯片之 Regulator 用法 與具體使用實例
電源管理芯片之 Regulator 用法 與具體使用實例





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論