 四足機器人周期函數效果演示
四足機器人周期函數效果演示
這里簡單利用一個線性函數進行演示
取a=1,b=1,其圖像隨時間變化如下:
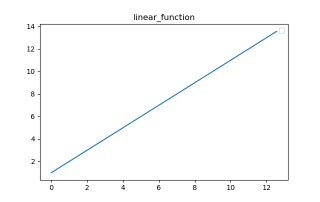
利用周期函數對時間進行調整,可以使其變成周期函數,設定周期為2s,時長為10s,其圖像如下:
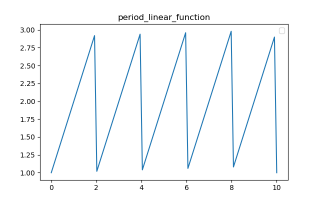
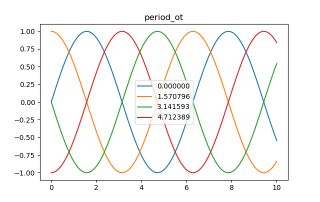
從圖像可以看出,剛好為5個周期,一個周期為一個尖角。接下來,為更好的觀察各曲線相位,我們設定該直線函數的3個周期,其相位差(offset)分別為[0,1,3,4],圖像如下:
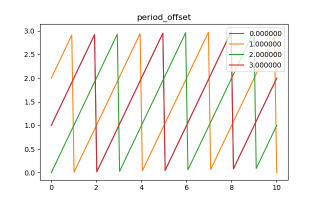
從上圖可以看出,我們的“尖角”會根據相位差,向前或向后平移。此方法對所有函數均適用,以下為利用sin函數進行的測試效果:
測試用代碼:
import numpy as np
import matplotlib.pyplot as plt
T = 2*np.pi
t = np.linspace(0, 10, 100)
offset = [0, 0.5*np.pi, np.pi, 1.5*np.pi]
# offset = [0]*4
phi_offset = []
def linear_fun(x):
return x+1
def linear_draw():
plt.title('linear_function')
plt.plot(t, linear_fun(t))
def single_period():
plt.title('period_linear_function')
plt.plot(t, linear_fun(t % T))
def period_draw():
plt.title('period_ot')
for i in range(len(offset)):
phi_offset.append(np.sin((t+offset[i]) % T))
plt.plot(t, phi_offset[i], label='%f' % offset[i])
period_draw()
plt.legend()
plt.show()
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29551瀏覽量
211876 -
函數
+關注
關注
3文章
4372瀏覽量
64355 -
四足機器人
+關注
關注
1文章
94瀏覽量
15422
發布評論請先 登錄
相關推薦
熱點推薦
stm32紅外六足機器人
六足爬行機器人畢業時的作品,當時還處于入門狀態,c程序寫的比較菜(程序寫的比較亂,僅作參考),一直想把這個六足機器人作品優化一下,可惜,一直在忙,現借助電路城這個平臺開源給大家,希望大
發表于 03-27 18:51
【OK210申請】四足輪式機器人
申請理由:我正在做這樣一個機器人,遇到了很多問題,非常想學習一下這款板子!我相信利用它能幫我解決難題!項目描述:可利用四足機械結構仿生行進,也可利用車輪進行行進,集四
發表于 06-25 19:38
四足機器人的機構設計
四足機器人屬于復雜機電系統,需要綜合生物、機械、電子、控制等學科內容,具體涉及仿生機構設計、靈巧運動機構設計、高性能驅動器制造,行走穩定性控制、強化學習等在內的多個研究方向。其中,機構設計是保障
發表于 09-15 06:54
ANYmal四足機器人的相關資料推薦
去年 1 月份,瑞士公司 ANYbotics 放出來一款靈活的四足機器人——ANYmal,它可以對抗各種惡劣的現實環境,適用于在危險的工業場景中執行任務。在最近的世界機器人大會上,AN
發表于 12-31 06:28
四足機器人遍地開花,四足機器人的市場有多大
幽靈公主的坐騎在現實中被造出來了? 日本川崎重工3月9日首次公開了旗下開發的全新四足機器人,外形類似宮崎駿《幽靈公主》中主角的坐騎——酷似山羊的雅酷兒。這款四






 工商網監
工商網監
評論