 Linux讀寫鎖邏輯解析—嘗試獲取寫鎖
Linux讀寫鎖邏輯解析—嘗試獲取寫鎖
Rwsem的count成員還有一些bit用來標記當前讀寫鎖狀態(waiter bit和handoff bit),也需要根據情況進行調整:
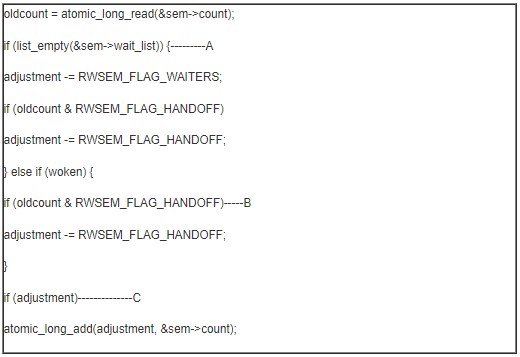
A、如果等待隊列為空了,肯定是要清除waiter flag,同時要清除handoff flag,畢竟沒有什么等待任務可以遞交鎖了。
B、雖然隊列非空,但已經喚醒了reader,那么需要清除handoff標記,畢竟top waiter已經被喚醒去持鎖了,完成了鎖的遞交。
C、完成sem->count的調整
第二輪將喚醒的reader加入喚醒隊列,具體的邏輯如下:

主要是把等待任務對象的task成員設置為NULL,喚醒之后根據這個成員來判斷是正常喚醒還是異常喚醒路徑。
這里對喚醒等待隊列上的reader和writer處理是不一樣的。對于writer,喚醒之然后被調度到之后再去試圖持鎖。對于reader,在喚醒路徑上就已經持鎖(增加rwsem的reader count,并且修改了相關的狀態標記)。之所以這么做主要是降低調度的開銷,畢竟若干個reader線程被喚醒之后,獲得CPU資源再去持鎖,持鎖失敗然后繼續阻塞,這些都會增加調度的負載。
七、嘗試獲取寫鎖
和down_write不一樣,down_write_trylock只是嘗試獲取寫鎖,如果成功,那么自然是好的,直接返回1,如果失敗,也不會阻塞,只是返回0就可以了。代碼主邏輯在rwsem_write_trylock函數中,如下:

tmp的初始值設定為RWSEM_UNLOCKED_VALUE(0值),對于writer而言,只有rwsem是空鎖的時候才能進入臨界區。如果當前的sem->count等于0,那么給sem->count賦值RWSEM_WRITER_LOCKED,標記持鎖成功,并且把owner設定為當前task。
atomic_long_try_cmpxchg_acquire函數有三個參數,從左到右分別是value,old和new。該函數會對比value和old,如果相等那么執行賦值value=new同時返回true。如果不相等,不執行賦值操作,直接返回false。
八、獲取寫鎖
Writer獲取寫鎖的代碼主要在__down_write_common函數中,如下:

rwsem_write_trylock(快速路徑)上一節已經描述,我們主要看慢速路徑的邏輯(樂觀自旋我們下面會講,這里暫且略過):

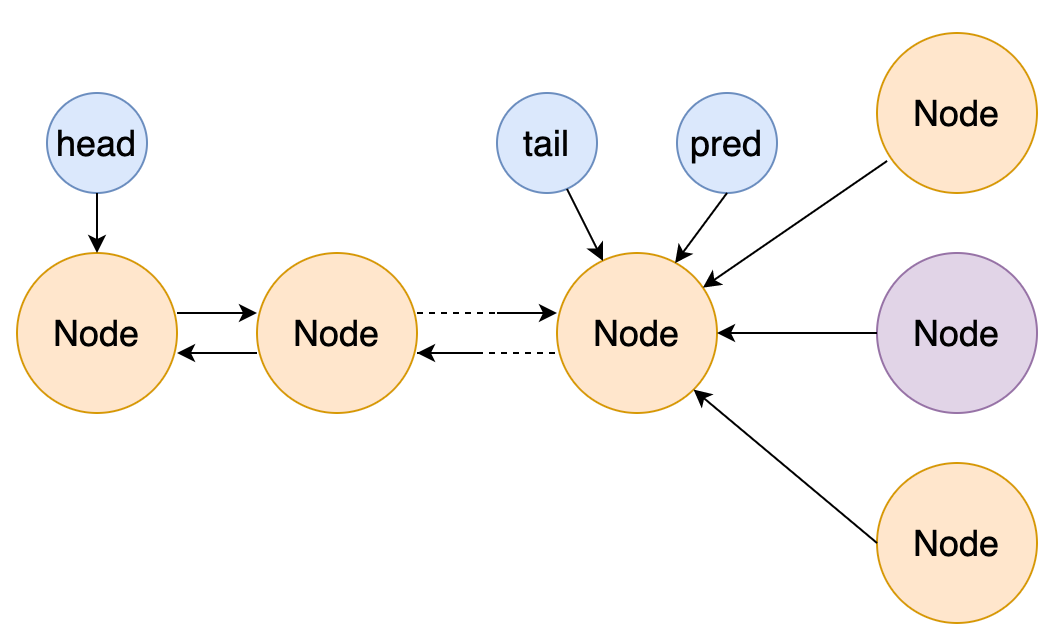
首先準備好一個等待任務對象(棧上)并初始化,將其掛入等待隊列。在真正睡眠之前,我們需要做一些喚醒動作(和reader持鎖過程類似,有可能在掛入等待隊列的時候,臨界區線程恰好離開,變成空鎖),具體邏輯如下:

A、如果我們是等待隊列的top waiter(等待隊列從空變為非空),那么需要設定RWSEM_FLAG_WAITERS標記,直接進入后續阻塞邏輯。如果不是,那么邏輯要復雜點,需要掃描一下之前掛入隊列的任務,看看是否需要喚醒。
B、如果是writer持鎖,那么不需要任何喚醒動作,畢竟writer是排他的
C、如果是空鎖狀態,我們需要喚醒top waiter(RWSEM_WAKE_ANY,top writer或者reader們)。你可能會疑問:為何空鎖還要喚醒等待隊列的線程?當前線程快馬加鞭去持鎖不就OK了嗎?這主要是和handoff邏輯相關,這時候更應該持鎖的是等待隊列中設置了handoff的那個waiter,而不是當前writer。如果是reader在臨界區內,那么,我們將喚醒本等待隊列頭部的所有reader(RWSEM_WAKE_READERS)。
D、上面僅僅是標記喚醒者,這里的代碼段完成具體的喚醒動作
下面進入具體writer的阻塞過程:

A、調用rwsem_try_write_lock試圖持鎖,如果成功持鎖則退出循環,不再阻塞。有兩個邏輯路徑會路過這里。一個是線程持鎖失敗進入這里,另外一個是阻塞后被喚醒試圖持鎖。
B、有pending的信號,異常路徑退出
C、持鎖失敗但是設置了handoff,那么該線程對owner進行自旋等待,以便加快鎖的傳遞。
D、進入阻塞狀態
E、喚醒之后,重新試圖持鎖。Writer和reader不一樣,writer是喚醒之后自己再通過rwsem_try_write_lock試圖持鎖,而reader是在喚醒路徑上持鎖。
rwsem_try_write_lock代碼如下:

A、如果已經設置了handoff,并且自己不是top waiter(top waiter才是鎖要遞交的對象),返回false,持鎖失敗。如果是top waiter,那么就設置handoff_set,標記自己就是鎖遞交的目標任務。
B、如果當前rwsem已經有了owner,那么說明該鎖被偷走了。在適當的條件下(等待超時)設置handoff標記,防止后續繼續被搶。如果已經設置了handoff就不必重復設置了。
C、如果當前rwsem沒有owner,則持鎖成功,清除handoff標記并根據情況設置waiter標記。
D、通過原子操作來持鎖,成功操作后退出循環,否則是有其他線程插入,需要重復上面的邏輯。

至此我們要不獲取了鎖并清除了handoff bit(B邏輯塊),或者沒有獲取鎖,僅僅是設置了handoff bit(A邏輯塊)。
九、釋放寫鎖
除了清除了owner task成員,其他邏輯和釋放讀鎖類似,不再贅述。
十、樂觀自旋的條件
只有writer在進入慢速路徑的時候才會進行樂觀自旋,而rwsem_can_spin_on_owner函數用來判斷writer是否可以樂觀自旋:

A、本cpu上需要reschedule,還自旋個毛線,趕緊去睡眠也順便觸發一次調度
B、讀取sem->owner,標記部分保存在flags臨時變量中,任務指針保存在owner中
C、如果該rwsem已經禁止了對應的nonspinnable標志,那么肯定是不能樂觀自旋了。如果當前rwsem沒有禁止,那么需要看看owner的狀態。這里需要特別說明的是:為了方便debug,我們在釋放讀鎖的時候并不會清除owner task。也就是說,對于reader而言,owner中的task信息是最后進入臨界區的那個reader,僅此而已,實際這個task可能已經離開臨界區,甚至已經銷毀都有可能。所以,如果rwsem是reader擁有,那么其實判斷owner是否在cpu上運行是沒有意義的,因此owner是reader的話是允許進行樂觀自旋的(ret的缺省值是true),通過超時來控制自旋的退出。如果rwsem是writer擁有,那么owner的的確確是正在持鎖的線程,如果該線程沒有在CPU上運行(不能很快離開臨界區),那么也不能樂觀自旋。
十一、rwsem_spin_on_owner
函數rwsem_spin_on_owner的功能是對rwsem的owner task進行樂觀自旋(即不斷輪詢其狀態,僅writer有效),詳細的代碼邏輯如下:

A、在自旋之前,首先要獲得初始的狀態(owner task指針以及2-bit LSB flag),當這些狀態發生變化才好退出自旋。
B、rwsem_owner_state函數會根據當前的owner task和flag判斷當前的owner state。owner state的狀態總結如下:

只有明確的知道當前rwsem的owner是某個writer線程且沒有禁止自旋的時候才開啟下面的自旋過程。對于其他情況,例如reader owned的場景,我們不需要spin on owner,直接返回。
C、只要owner task或者flag其一發生變化,這里就會停止輪詢,同時也會返回當前的狀態,說明停止自旋的原因。例如當owner task(一定是writer)離開臨界區的時候會清空rwsem的owner域(owner task和flag會清零),這時候自旋的writer會停止自旋,到外層函數會去試圖持鎖。當然也有可能是其他自旋writer搶到了鎖,owner task從A切到B。無論那種情況,統一終止對owner的自旋。
D、如果當前cpu需要reschedule或者owner task沒有正在運行,那么也需要停止自旋
十二、Writer的樂觀自旋
和mutex的樂觀自旋的概念是類似的,想要進行rwsem的樂觀自旋,首先要獲取osq鎖,只有獲得了osq lock才能進入rwsem的樂觀自旋,否則自旋在per cpu的mcs lock上。Writer通過rwsem_optimistic_spin完成整個樂觀自旋的過程。對于writer owned場景,自旋發生在rwsem_spin_on_owner中,上一節已經描述了,這里我們主要看reader owned的情況,這時候通過for loop不斷自旋去持鎖:


A、對于rwsem,只有writer-owned場景能清楚的知道owner task是哪一個。因此,如果是writer-owned場景,會在rwsem_spin_on_owner函數進行自旋。對于非writer-owned場景(reader-owned場景或者禁止了樂觀自旋),在rwsem_spin_on_owner函數中會直接返回。從rwsem_spin_on_owner函數返回會給出owner state,如果需要退出樂觀自旋,那么這里break掉,自旋失敗,下面就準備掛入等待隊列了。
B、每次退出rwsem_spin_on_owner并且沒有要退出自旋的時候,都試著去獲取rwsem,如果持鎖成功那么退出樂觀自旋。
C、C和D是對reader-owned場景的處理。每次rwsem的owner state發生變化(從non-reader變成reader-owned狀態)時都會重新初始化 rspin_threshold。
D、Owner state沒有發生變化,那么當前試圖持鎖的writer可以進行樂觀自旋,但是需要有一個度,畢竟rwsem的臨界區內可能有多個reader線程,這有可能使得writer樂觀自旋很長時間。設置自旋門限閾值的公式是Spinning threshold = (10 + nr_readers/2)us,最大25us(30 reader)。一旦自旋超期,那么將調用rwsem_set_nonspinnable禁止樂觀自旋。
E、對于writer-owned場景,need_resched在函數rwsem_spin_on_owner中完成,對于reader-owned場景,也是需要檢查owner task所在cpu的resched情況。畢竟當前任務如果有調度需求,無論reader持鎖還是writer持鎖場景都要停止自旋。
F、在reader-owned場景中,由于無法判定臨界區reader們的執行狀態,因此rt線程的樂觀自旋需要更加的謹慎,畢竟有可能自旋的rt線程和臨界區的reader在一個CPU上從而導致活鎖現象。當然也不能禁止rt線程的自旋,畢竟在臨界區為空的情況下,rt自旋會有一定的收益的。允許rt線程自旋的場景有兩個:
a) lock owner正在釋放鎖,sem->owner被清除但是鎖還沒有釋放。
b) 鎖是空閑的并且sem->owner已清除,但是在我們嘗試獲取鎖之前另一個任務剛剛進入并獲取了鎖(例如一個自旋的writer先于我們進入臨界區)。
十三、關于handoff
1、設置handoff標記
設置handoff往往是發生在喚醒持鎖階段。對于等待隊列的writer,喚醒之后要調度執行后才去持鎖,這是一個長路徑,很可能被其他的write或者reader把鎖搶走。喚醒等待隊列中的reader們有點不一樣,在喚醒路徑上就會從這一組待喚醒的reader們選出一個代表(一般是top waiter)去持鎖,然后再一個個的喚醒。在這個reader代表線程持鎖的時候也有可能由于writer偷鎖而失敗(reader雖然也會偷鎖,但是偷鎖的reader也會喚醒等待隊列的reader們,完成top waiter未完成的工作)。
無論是reader還是writer,如果喚醒后持鎖失敗,并且等待時間已經超過了RWSEM_WAIT_TIMEOUT,這時候就會設置handoff bit,防止等待隊列的waiter餓死。具體設置handoff bit的場景如下:

2、清除handoff標記
標記了hand off之后,快速路徑、樂觀偷鎖(reader)、樂觀自旋(writer)都無法完成持鎖,鎖最終會遞交給top waiter的線程,完成持鎖。一旦完成持鎖,handoff標記就會被清除。具體清除handoff bit的場景包括:

3、確保鎖的所有權遞交給top waiter

十四、結論
標準linux內核的讀寫鎖是在公平性、吞吐量和延遲選擇了比較均衡的策略,這樣的策略在手機平臺上(特別是重載場景下)不能算是“優秀”,只能是合格吧。實際上,在手機用戶交互場景中,我們更期望是確保用戶體驗相關線程的持鎖時延,同時兼顧吞吐量。在這樣的背景下,OPPO內核團隊對linux中的讀寫鎖進行了優化,下一次有機會可以分享我們在讀寫鎖的持鎖時延方面做的改進。
-
cpu
+關注
關注
68文章
11053瀏覽量
216255 -
Linux
+關注
關注
87文章
11479瀏覽量
213026 -
狀態機
+關注
關注
2文章
493瀏覽量
28112 -
Spin
+關注
關注
0文章
4瀏覽量
8130
發布評論請先 登錄
Linux下線程間通訊---讀寫鎖和條件變量
Linux讀寫鎖邏輯解析—Linux為何會引入讀寫鎖?
寫FPGA代碼時,產生了鎖存器有什么影響嗎
《有鎖》/《無鎖》/《簽約》/《解鎖》/《越獄》/《激活》專
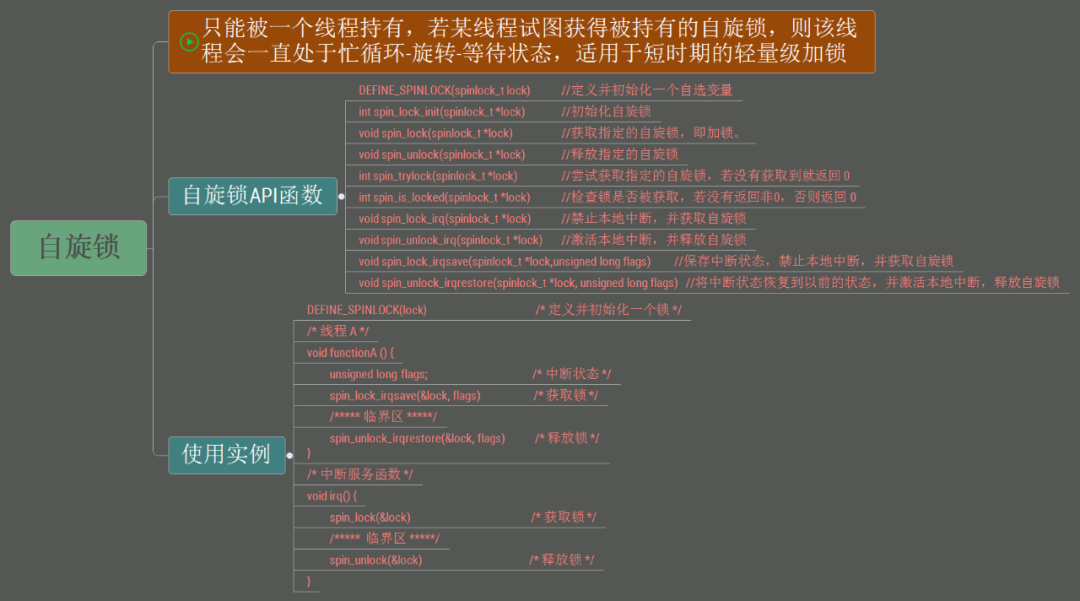
Linux 自旋鎖spinlock
詳談Linux操作系統的三種狀態的讀寫鎖
Linux中的傷害/等待互斥鎖介紹
使用Linux自旋鎖實現互斥點燈
Linux實例:多線程和互斥鎖到底該如何使用






 工商網監
工商網監
評論