 離散域下內置式永磁同步電機復矢量電流調節器設計
離散域下內置式永磁同步電機復矢量電流調節器設計
導讀:本期文章主要介紹離散域下內置式永磁同步電機復矢量電流調節器的設計。通過與傳統的線性PI調節器仿真驗證分析,離散域下設計的電流調節器削弱了d、q之間耦合的影響,大大提高了系統的控制性能。
一、引言
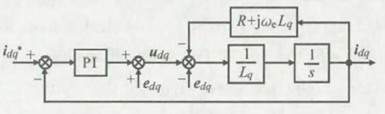
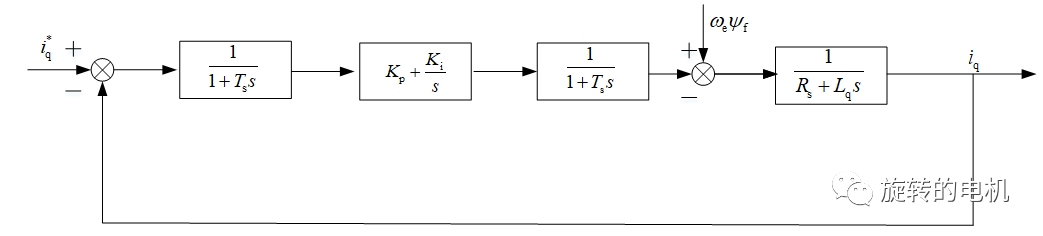
圖1-1 傳統線性PI調節器控制框圖
傳統矢量控制中線性PI調節器的電流內環分別采用d、q軸兩個獨立的控制環,受到環路間存在交叉耦合項、控制器離散化處理時產生的誤差、數字控制系統延時等因素的影響,同時該耦合項與同步角頻率成正比,使得傳統的線性PI調節器不能完全實現獨立設計,從而導致交流電機的控制精度受到影響。在實際應用中大都采用數字控制系統,傳統方法基于連續域設計的調節器,最終還需要進行離散化處理,不可避免地引入誤差。同時數字控制系統存在一拍延時,進一步降低控制系統的性能。
二、離散域電流調節器的設計
傳統的線性PI調節器將電流內環分離成d、q軸兩個控制環,由于環路之間存在交叉耦合項導致不能實現完全獨立設計。而復矢量調節器將d、q軸電流環當成一個整體,與傳統方法相比具有更優的控制性能和參數魯棒性。
2.1 永磁同步電機數學模型
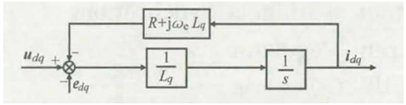
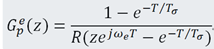
圖2-1 IPMSM復矢量數學模型
從圖(2-1)可以看出,通過復矢量的表示方法,IPMSM在同步坐標系中的d、q之間的耦合以電機模型極點的虛部形式來體現,虛部的大小與同步角頻率有關。
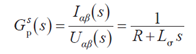
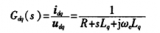
建立精確的數學模型是實現電流環高性能控制的關鍵。根據圖(2-1),在靜止坐標系中IPMSM模型可以由下面簡單的電阻/電感復矢量傳遞函數來表示:
2.2 離散域下電流調節器的設計
為了在離散域內對電流調節器的設計和性能進行分析,對IPMSM在離散域內的建模至關重要。將上式所示的物理系統轉換到離散域內的通常做法是將逆變器作為一個理想的零階保持器,則在靜止坐標系中感應電機模型在離散域內的表示為:

進行離散化處理后,得到:
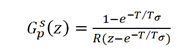
將上式轉換成同步旋轉坐標系下的差分方程,然后得到旋轉坐標系中的感應電機數學模型在離散域中的傳遞函數為:
引入直接離散的復矢量電流調節器,通過在離散域內直接對電流調節器進行設計,使離散電流調節器的零點與離散的電機模型的極點對消,避免了由離散化導致電流調節器性能的偏差。
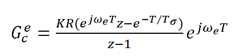
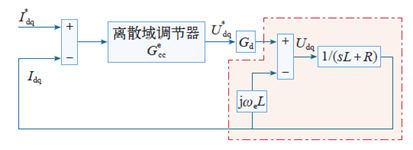
圖2-2 離散域調節器的控制框圖
三、仿真建模與波形分析
圖3-1 內置式永磁同步電機矢量控制系統仿真
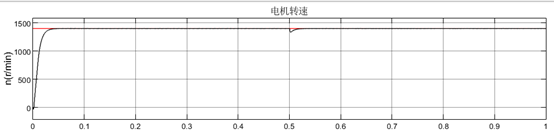
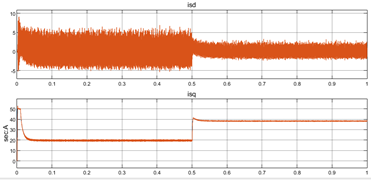
圖3-2 傳統線性PI電流調節器(1400rpm)
從圖(3-2)可以發現:由于d、q軸之間存在交叉耦合,在高速區域時d、q軸電流的紋波較大。由于d、q軸存在耦合,重構的靜止坐標系下的定子電壓也隨之劣化,如圖(3-3)所示。
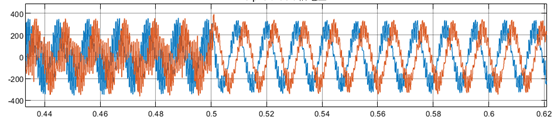
圖3-3 重構的電壓(靜止坐標系下)
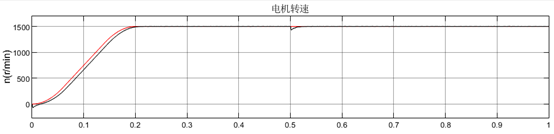
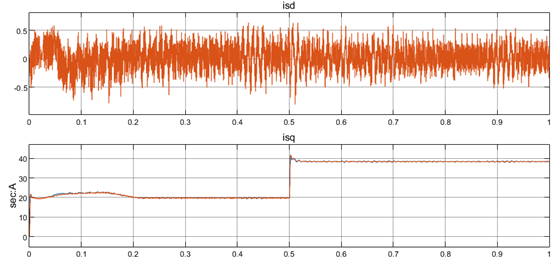
圖3-4 離散域下PI電流調節器(1400rpm)
從圖(3-4)可以發現:d、q軸電流的紋波明顯減小,耦合關聯程度降低。重構的電壓也趨于正弦。
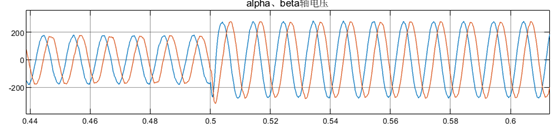
圖3-5 重構的電壓(靜止坐標系下)
四、總結
把d、q軸當成一個整體,在離散域下建立電流環數學模型,同時考慮數字控制系統的一拍延遲來直接設計離散域電流調節器。通過仿真對比驗證,采用優化設計的電流調節器,d、q軸電流動態響應快且沒有超調。削弱d、q軸之間的耦合,大大提高了整體控制性能。
審核編輯:湯梓紅
-
控制系統
+關注
關注
41文章
6732瀏覽量
111530 -
永磁同步電機
+關注
關注
28文章
875瀏覽量
49985 -
矢量電流
+關注
關注
0文章
3瀏覽量
5509 -
電流調節器
+關注
關注
0文章
20瀏覽量
11880 -
PI調節器
+關注
關注
1文章
21瀏覽量
8551
原文標題:離散域下內置式永磁同步電機復矢量電流調節器設計
文章出處:【微信號:淺談電機控制,微信公眾號:淺談電機控制】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦


永磁同步電機面裝式內置式和凸極性隱極性的對應關系
永磁同步電機簡介
永磁同步電機轉速電流雙閉環PI參數整定

永磁同步電機(PMSM)磁場定向控制(FOC)電流環PI調節器參數整定
永磁同步電機磁場定向控制轉速環PI調節器參數整定
永磁同步電機磁場定向控制電流環PI調節器的參數整定





 工商網監
工商網監
評論