 微美全息(NASDAQ:WIMI)開發基于神經網絡的無人機控制系統引領技術革新
微美全息(NASDAQ:WIMI)開發基于神經網絡的無人機控制系統引領技術革新

在現代科技快速發展的背景下,無人機技術逐漸成為民用和商業領域中車載工具。然而,隨著無人機應用領域的擴展,系統在執行任務時可能面臨多變的氣象條件、復雜的區域、以及各種不可替代的環境預知的環境因素。這使得無人機系統需要更加智能和監控的控制系統。傳統的線性控制系統在處理非線性和復雜動態系統時存在著短板,無人機系統的飛行動力學通常是非線性的,因此需要一種能夠有效處理此類動態系統的先進控制方法。此外,無人機系統面臨的挑戰也隨之增加,這些挑戰包括不斷變化的環境、未知噪聲、系統不確定性和復雜的動態問題,這些因素的存在增加了系統的不確定性,需要一個能夠實時適應和調整的控制系統。據悉,微美全息(NASDAQ:WIMI)一直在此背景下希望開發一種創新的智能控制系統,以解決這些不確定性的問題提高無人機的控制準確性。
隨著無人機技術的逐漸成熟,市場對于更加智能、更加激烈的系統需求迫切增長。人工神經網絡作為一種先進的非線性建模和控制方法,在處理復雜、非線性系統方面表現出色。WIMI微美全息意識針對這一發展趨勢,將人工神經網絡引入無人機控制系統,以提高系統的性能和配件。
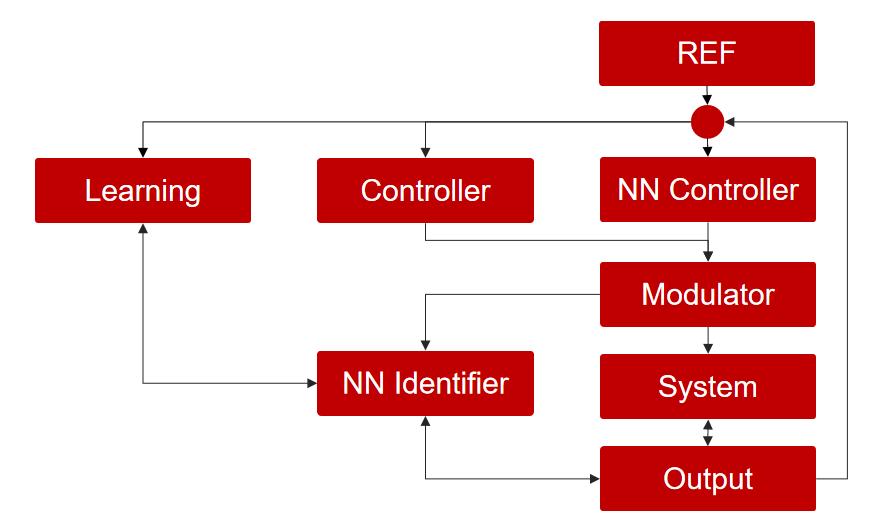
首先,為了實現對無人機系統中未知動態和不確定性的實時識別,WIMI微美全息開發了一種基于神經網絡的標識符。該標識符的任務是通過監測系統輸入和輸出之間的關系,動態識別地捕捉和學習系統的未知特性。使用適當的神經網絡結構,例如循環神經網絡(RNN)或長短時記憶網絡(LSTM),能夠建立一個能夠持續迭代和更新的標識符,從而提高對系統動態的逼近精度。再通過將標識符捕獲到的信息與已知的系統動態相結合,生成了一個基于神經網絡的系統模型。這個模型可以是線性的或非線性的,取決于具體系統的性質。 ,結合線性或非線性控制器,生成了基于神經網絡的控制器。這個控制器的設計考慮了系統模型的動態變化,以實現對系統的實時調整,從而保持其在不確定環境下的穩定性性和性能。
此外,WIMI微美全息為了確保在線訓練階段系統的穩定性,引入了線性或非線性控制器。這些控制器在學習過程中充當保護層,防止系統因為未知的動態變化而導致不穩定行為的。在在線訓練過程中中,通過將這些穩定性控制器與基于神經網絡的控制器良好地工作,能夠在學習的同時保持系統的安全運行,從而最大程度地減少不確定性對系統性能的影響。
為了評估所提出的智能控制系統的性能,WIMI微美全息進行了大量的計算機仿真實驗。以系統不確定性和干擾動的基準無人機為對象,對系統的穩定性和控制性能進行了全面的評估通過模擬飛行不同的環境和任務場景,驗證了該系統在高效復雜環境、噪聲和干擾時的魯棒性和魯棒性。
WIMI微美全息基于人工神經網絡的無人機智能控制系統代表了在無人機技術領域的一次巨大飛躍。首先,通過引入基于神經網絡的強制標識符,系統能夠實時識別和近無人機系統中的未知特性,為后續控制器的設計提供了精準的基礎。
這一創新技術的開發,為無人機系統的應用領域帶來了新的前景。通過大量的計算機仿真驗證,該系統在復雜環境、噪聲和干擾下表現出色,成功實現了無人機的應用穩定飛行和控制。這不僅使無人機在民用和商業領域的高效應用可靠,同時也為未來的科技發展奠定了堅實的基礎。WIMI微美全息的技術突破不僅使無人機系統在復雜環境下的適應能力,也為科技領域帶來了啟示,將在未來的智能系統發展中發揮關鍵作用。
顯然,這項技術不僅僅是針對無人機技術的重要貢獻,更是對整個人工智能與航空領域深度融合的濾波器。未來,這一技術將推動無人機技術的不斷發展和智能系統的推進開拓新的道路,WIMI微美全息將繼續致力于推動科技的不斷進步,為構建更加智能和可靠的未來做出更大的貢獻。
審核編輯 黃宇
-
控制系統
+關注
關注
41文章
6780瀏覽量
112157 -
神經網絡
+關注
關注
42文章
4814瀏覽量
103584 -
無人機
+關注
關注
231文章
10841瀏覽量
186750
發布評論請先 登錄
低空物流:無人機開啟未來配送新篇章
無人機智能巡檢系統革新運維與監控的未來
《手把手教你做星閃無人機—KaihongOS星閃無人機開發實戰》系列課程課件匯總
北斗模塊在無人機領域的革新應用與未來展望
無人機電力巡檢系統革新電力巡檢作業模式
濕熱試驗箱的環保技術如何為無人機行業“減負”

革新無人機導航:如何重新定義IMU高性能低成本
無人機自動巡檢系統技術革新與應用前景
低空經濟的第一助推力,基于鴻道Intewell操作系統的無人機控制系統
無人機光伏巡檢系統的崛起于挑戰






 工商網監
工商網監
評論