 如何使用MATLAB和MATLAB Parallel Server擴展整車仿真呢?
如何使用MATLAB和MATLAB Parallel Server擴展整車仿真呢?
使用 MATLAB 和 Simulink 設計和構建 Rivian 車輛仿真界面平臺幫助我們實現了關鍵目標。我們為工程師和非工程師創建了統一平臺,用于運行整車仿真、后處理結果和創建報告。
整個汽車行業的工程師越來越依賴仿真來評估操控性能、加速性能、續航里程和其他關鍵性能指標。與物理測試相比,通過仿真來評估車輛性能速度更快,成本也更低。
整車仿真還有助于設計工作在原型硬件可用之前在開發過程中盡早進行。然而,隨著車輛仿真的成本和效率優勢在組織內日趨明顯,仿真需求的增加使得車輛仿真面臨一系列挑戰。
考慮到與商業仿真軟件對接和運行整車仿真所帶來的復雜性,需要擁有一支專門的仿真工程師團隊,他們具備必要的專業知識。
然而,該團隊可能很快會因各利益相關者的要求而不堪重負,這些利益相關者包括屬性工程師、性能工程師、動力學工程師、續航里程和效率工程師以及高級管理人員。簡單地執行這些團隊要求的多個仿真也可能成為瓶頸,特別是當這些仿真連續地在商業軟件上運行時更是如此。
最后,由于缺乏標準化的車輛數據,加上對仿真結果的臨時后處理,這使得工程師爭相獲取黃金源數據和采用獲準的方法來報告結果,從而加劇了這些困難。
在 Rivian,我們的團隊開發了可擴展、易于使用的平臺,用于配置、運行和后處理大量整車仿真。此車輛仿真界面 (VSI) 平臺是使用 MATLAB 和 Simulink 開發的,有助于減少冗余,提高復用性,并通過并行處理提高仿真吞吐量。借助使用 App 設計工具構建的直觀用戶界面,該平臺還讓整個公司的工程團隊都能輕松實現仿真,從而消除了仿真請求瓶頸(圖 1)。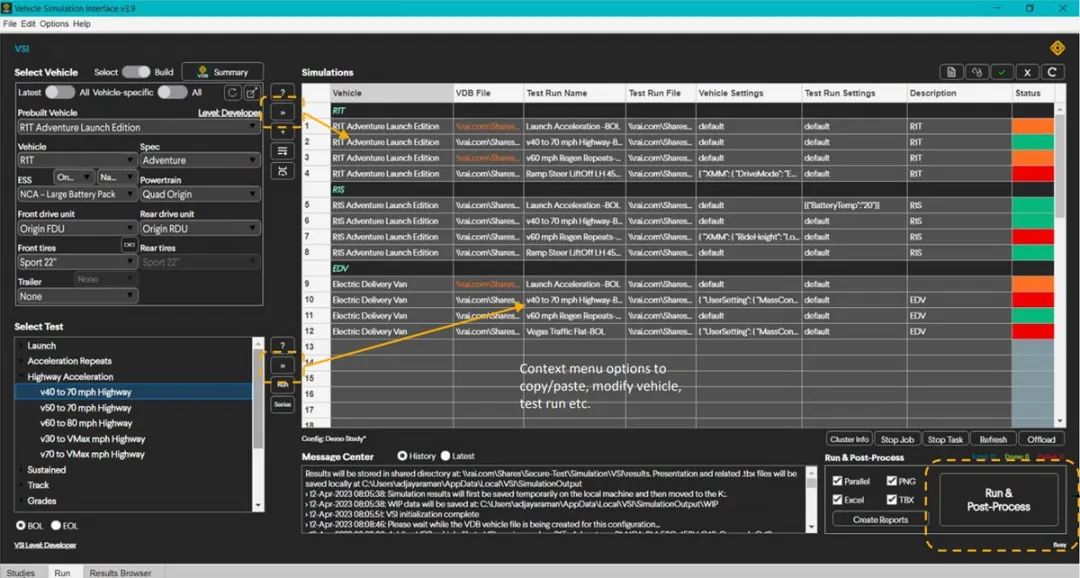
圖 1. VSI 用戶界面。 本文介紹我們如何使用面向對象的原則設計 VSI,如何利用它來使仿真更平等普及,以及如何使用并行處理來擴展仿真工作量。
VSI 的面向對象的涉設計
當我們開始設計 VSI 平臺時,面向對象的方法顯然是實現靈活性、可擴展性和復用性等目標的最直接方法。我們首先明確定義了幾個基本對象:Vehicle、Load Case 和 Simulation。在這種情形下,Vehicle 對象用于表示 Rivian 車輛,例如 Rivian R1T、Rivian R1S 或 Rivian EDV(我們的電動貨車)。
此對象還表示車輛的配置,用于定義特定的電池組、動力總成系統、輪胎、前后驅動裝置和其他組件。Load Case 對象用于定義仿真場景,包括速度曲線、環境條件和駕駛工況。而 VSI Simulation 對象只是 Vehicle 實例與特定 Load Case 的組合(圖 2)。
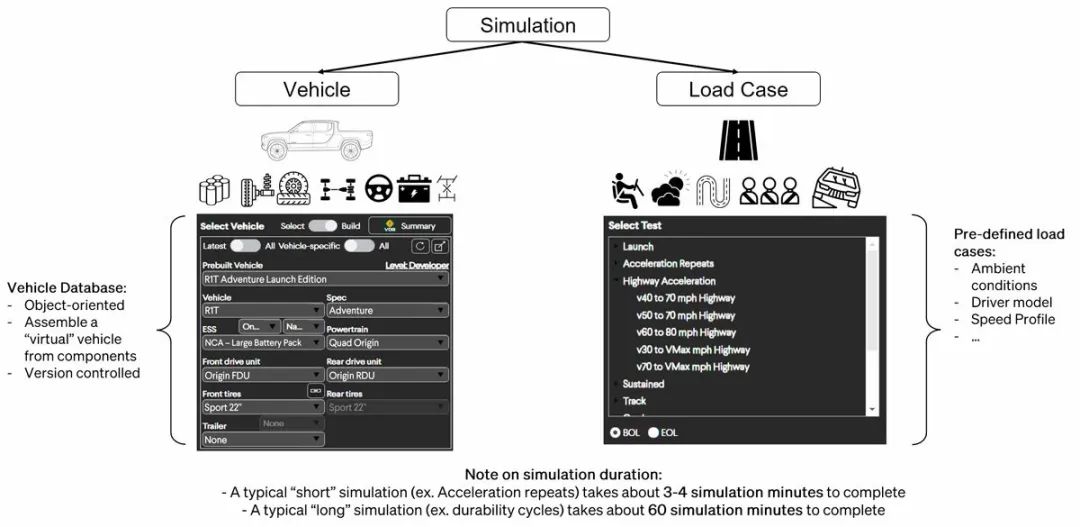
圖 2. VSI 仿真包括特定車輛配置和預定義的測試場景。 從編程的角度來看,可將 Simulation 的概念視為構成 VSI 平臺基礎框架的超類。此超類的屬性包括可以通過用戶界面選擇的車輛配置和測試場景屬性,以及一組用于創建模型、運行仿真、執行后處理、提取度量和共享結果的方法(圖 3)。借助 MATLAB 的面向對象的編程功能,我們可以輕松地針對 VSI 平臺創建這種類結構體的實現。
MATLAB 句柄對象尤其適用于封裝仿真中包含的所有信息(不僅包括車輛和測試場景,還包括用戶設置、結果和度量),并在 VSI 內高效傳輸這些信息,而無需復制數據。這些對象隨后可以轉換為元數據文本文件并進行存檔,使我們能夠通過從元數據重新構造對象來重新創建任何歷史仿真。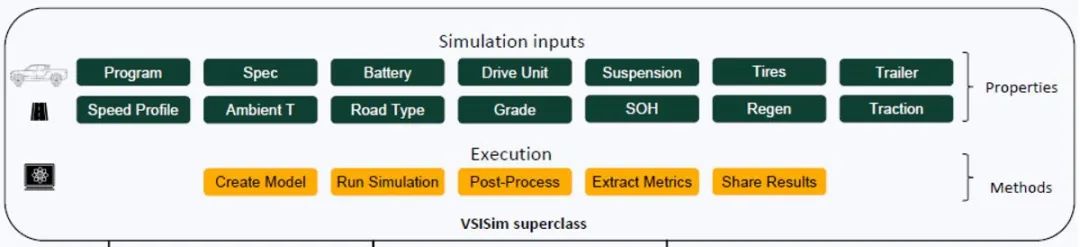
圖 3. VSISim 超類,包括仿真輸入和執行方法。
使仿真更平等普及和最大化復用
我們已將 VSI 部署為 MATLAB 工具箱和獨立可執行文件(用 MATLAB Compiler 編譯),可供未安裝 MATLAB 的同事使用。由于可以輕松訪問 VSI,團隊不再需要等待 Simulink 工程師來運行仿真并獲得結果。 VSI 界面的左側(如圖 1 所示)用于選擇車輛配置和測試場景,而界面的右側顯示用不同顏色表示的仿真列表。紅色表示尚未運行的仿真,綠色表示已完成的仿真,琥珀色表示已完成的仿真以及過期結果(例如,當新組件數據可用或模型修訂時,可能會發生這種情況)。
值得注意的是,VSI 的仿真結果是共享的;工程師可能會發現他們要運行的仿真已由本團隊或完全不同的團隊中的某個人完成。工程師可以利用已有的仿真結果,避免運行相同且不必要的仿真,從而節省時間和計算資源。 在定義并選擇了要運行的仿真后,工程師可點擊標有 Run & Post-Process 的按鈕(如圖 1 所示)。仿真是結合使用 Simulink 和商業仿真軟件在后臺通過 MATLAB API 啟動的(圖 4)。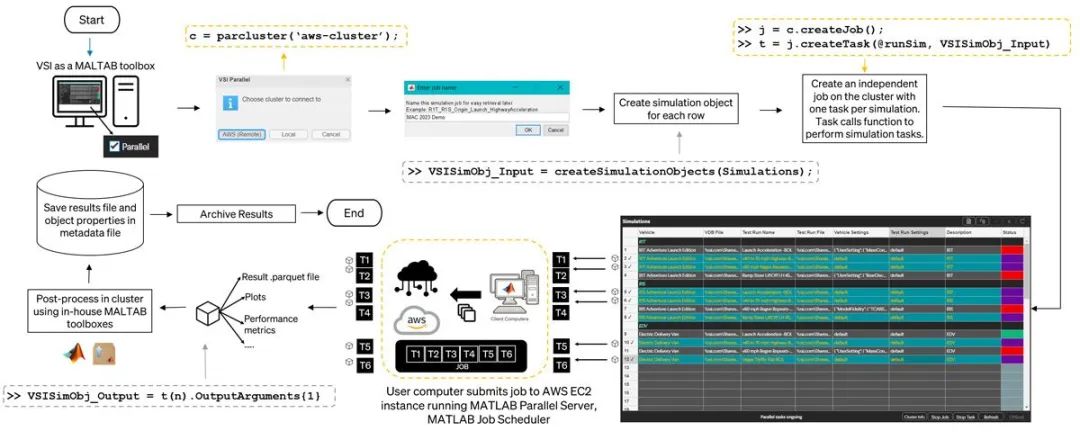
圖 4. 集群仿真的工作流程圖,以及顯示五個調度仿真的 VSI 界面(以藍色突出顯示)。紫色狀態表示仿真正在進行中;紅色狀態則表示仿真已完成。
在單個仿真完成后,記錄的數據會發送回 MATLAB 工作區進行處理,然后轉換為 Apache Parquet 數據文件格式,并最終存檔在共享目錄中。我們還開發了一套 MATLAB 腳本,用于匯總結果以生成關鍵度量,根據我們的需求管理系統中設置的目標報告仿真狀態,并生成自動報告來概括關鍵性能指標,以供 Rivian 高級管理層參考。
通過并行處理實現擴展
在 VSI 用戶界面中,工程師可以選擇使用本地計算機上的多個內核來并行運行仿真,也可以選擇使用遠程 Amazon Web Services (AWS) 集群來執行此操作(圖 5)。本地方法利用了 Parallel Computing Toolbox,它是工程師在測試模型更新和更改時最常選用的方法。遠程方法基于運行 MATLAB Parallel Server 的 AWS EC2 實例,適用于具有已經過測試和驗證的模型的生產環境。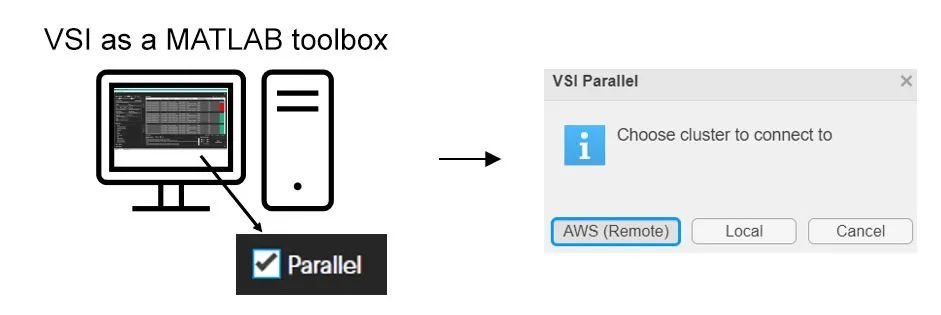
圖 5. 用于并行處理的 VSI 選項。
在遠程并行工作流中,MATLAB Parallel Server 和 MATLAB 作業調度器發揮著重要作用。VSI 先從 MATLAB Parallel Server 調用 parcluster 函數,以根據我們所定義的 AWS EC2 配置文件創建一個集群對象。在為要并行運行的每個仿真創建了一個仿真對象后,VSI 將在集群上創建一個作業,并為每個仿真創建一個單獨的任務。該作業及其任務通過 MATLAB 作業調度器提交到 AWS EC2 實例。該調度器可協調作業的執行,并將任務分配給各個集群工作進程。當仿真完成時,MATLAB 后處理函數會在集群上運行,然后結果再進行存檔和共享。對于大型作業,例如涉及 14 個冗長仿真的作業,遠程并行方法要快得多,在 68 分鐘內即可完成作業,而依序方法需要 9 個多小時(圖 6)。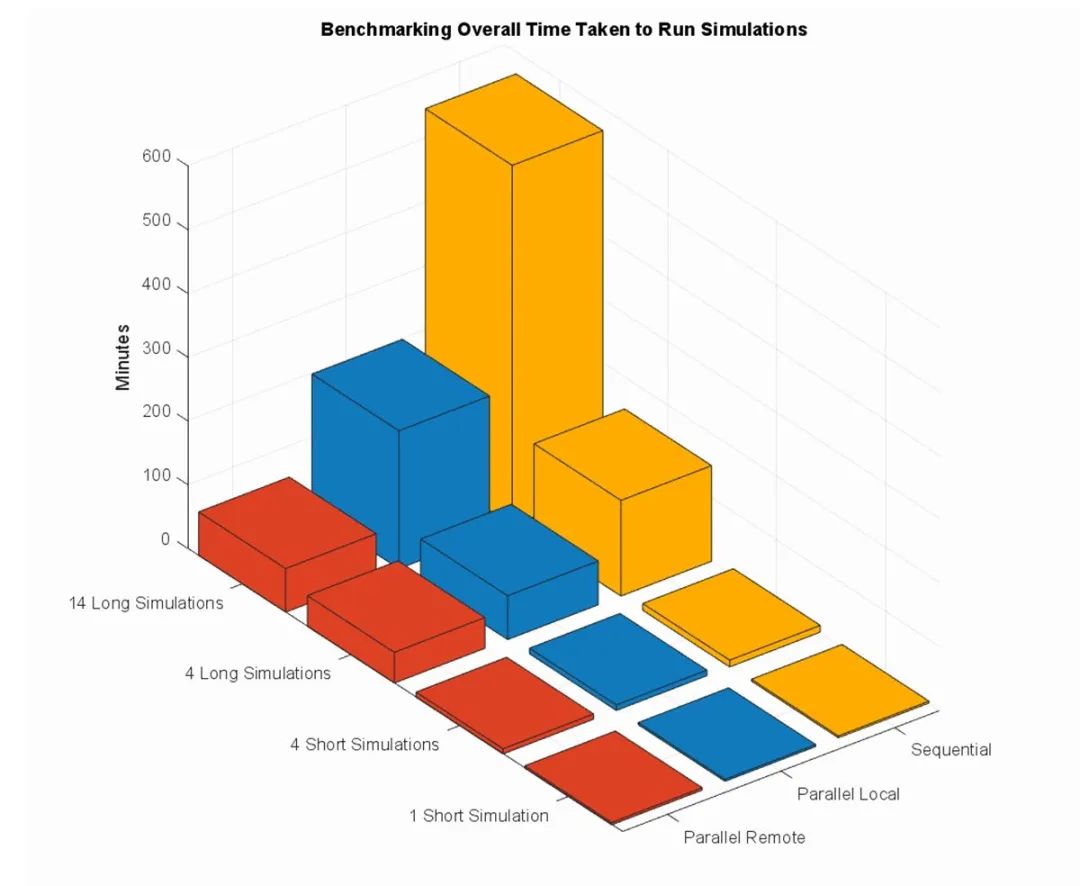
圖 6. 依序(黃色)、本地并行(藍色)和遠程并行(紅色)方法的基準仿真時間。 在過去的六個月里,我們在 Rivian 的同事已使用 VSI 進行了 9,000 多次整車仿真,總共模擬行駛了大約 200 萬英里。
計劃的改進
使用 MATLAB 和 Simulink 設計和構建 VSI 平臺幫助我們實現了關鍵目標。我們為工程師和非工程師創建了統一平臺,用于運行整車仿真、后處理結果和創建報告。我們消除了仿真請求瓶頸,減少了仿真任務中的冗余,并提高了仿真復用性。此外,我們還通過支持在 AWS 集群或本地工作站的多個內核上并行運行仿真,最大程度地提高了吞吐量。
我們計劃對 VSI 做出大量改進,包括將該平臺部署為 Web 應用,為關鍵性能指標添加儀表板,以及簡化從用戶界面使用試驗設計 (DOE) 的過程。與此同時,我們還在繼續開發和擴展 Rivian 的 MATLAB Minimart,這是內部構建的 MATLAB 工具箱集合,用于數據轉換和查看、啟動和制動分析,以及各種其他經常需要的功能。
審核編輯:劉清
-
電動車
+關注
關注
73文章
3071瀏覽量
115676 -
matlab
+關注
關注
188文章
2998瀏覽量
233283 -
仿真器
+關注
關注
14文章
1034瀏覽量
84991 -
Simulink
+關注
關注
22文章
540瀏覽量
63657
原文標題:Rivian:使用 MATLAB 和 MATLAB Parallel Server 擴展整車仿真
文章出處:【微信號:MATLAB,微信公眾號:MATLAB】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
MATLAB用戶在GPU上實現具有GPU計算特色的代碼加速
MATLAB Runtime Server 應用程序開發指南
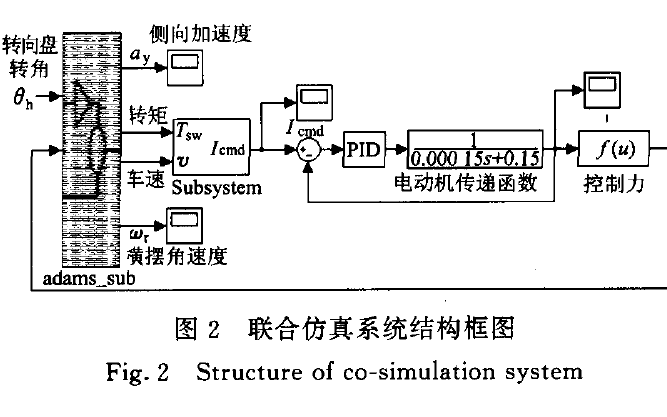
如何使用ADAMS和Matlab實現EPS和整車系統的聯合仿真





 工商網監
工商網監
評論