") 直流電機(jī)h橋驅(qū)動(dòng)方式有哪些
直流電機(jī)h橋驅(qū)動(dòng)方式有哪些

在現(xiàn)代工業(yè)控制系統(tǒng)中,直流電機(jī)因其出色的速度和位置控制性能而得到廣泛應(yīng)用。其中,H橋電路作為一種常見(jiàn)的電機(jī)驅(qū)動(dòng)方案,能夠?qū)崿F(xiàn)電機(jī)的正反轉(zhuǎn)及速度調(diào)節(jié)。今天,我們就來(lái)深入探討H橋電路的三種基本驅(qū)動(dòng)方式:受限單機(jī)、單極和雙極模式,并分析它們的工作原理與應(yīng)用場(chǎng)景。
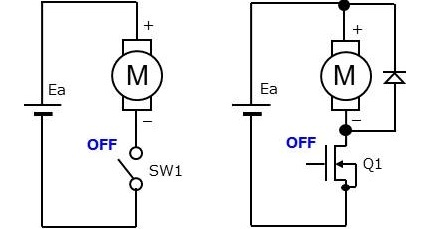
電機(jī)電樞驅(qū)動(dòng)電壓極性是單一的,這意味著它只能通過(guò)改變PWM控制信號(hào)來(lái)調(diào)節(jié)電機(jī)的轉(zhuǎn)速。這種控制方式的優(yōu)點(diǎn)在于其簡(jiǎn)單性,因?yàn)橹恍枰獙?duì)一個(gè)MOS進(jìn)行PWM控制即可實(shí)現(xiàn)電機(jī)的調(diào)速。然而,這種控制方式也存在一些缺點(diǎn)。
首先,由于電壓極性是單一的,電機(jī)無(wú)法實(shí)現(xiàn)剎車和能耗制動(dòng),這限制了其在需要快速停止或精確控制的應(yīng)用中的使用。其次,當(dāng)負(fù)載超過(guò)設(shè)定速度時(shí),電機(jī)無(wú)法提供反向力矩,這可能導(dǎo)致系統(tǒng)的不穩(wěn)定性和調(diào)速性能的下降。此外,由于電壓極性的單一性,調(diào)速靜差較大,調(diào)速性能較差,穩(wěn)定性也不理想。
因此,在設(shè)計(jì)電機(jī)控制系統(tǒng)時(shí),需要綜合考慮這些因素,選擇適合的控制方式以實(shí)現(xiàn)所需的性能要求。
接下來(lái),我們看看單極模式。單極驅(qū)動(dòng)方式指的是在電機(jī)運(yùn)行過(guò)程中,只有一組開(kāi)關(guān)(通常是下橋臂或上橋臂的兩個(gè)開(kāi)關(guān))被用來(lái)控制電流的流向。這種方式簡(jiǎn)單且成本較低,但在大功率應(yīng)用中可能會(huì)引起較大的功耗和熱量。可以將其比作一條單車道的道路,車輛(電流)只能在這條道路上單向行駛,效率自然不如雙向車道高。
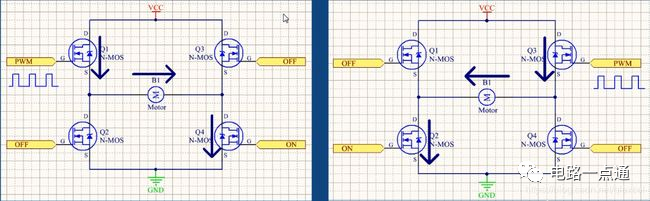
最后是雙極模式,這是一種更為高效的驅(qū)動(dòng)方式。在雙極模式中,H橋的所有四個(gè)開(kāi)關(guān)都會(huì)參與工作,通過(guò)快速地切換上下橋臂的導(dǎo)通狀態(tài),不僅可以改變電流的方向,還可以通過(guò)調(diào)整開(kāi)關(guān)的占空比(PWM信號(hào)的寬度)來(lái)精確控制電機(jī)的速度。這種模式就像是一個(gè)四車道的高速公路,能夠支持雙向通行,并且可以根據(jù)交通流量實(shí)時(shí)調(diào)整車道的使用,大大提高了運(yùn)輸效率。
在實(shí)際選擇驅(qū)動(dòng)方式時(shí),工程師會(huì)根據(jù)應(yīng)用需求和電機(jī)特性來(lái)決定。例如,如果電機(jī)需要在頻繁啟停的環(huán)境中工作,受限單機(jī)模式可能是最佳選擇;而在對(duì)效率要求較高的場(chǎng)合,雙極驅(qū)動(dòng)則更為合適。單極驅(qū)動(dòng)由于其控制簡(jiǎn)單且成本較低,常用于一些小型或低功率設(shè)備中。
總結(jié)來(lái)說(shuō),受限單機(jī)、單極和雙極模式各有千秋,它們都是H橋電路驅(qū)動(dòng)直流電機(jī)的不同策略,了解這三種驅(qū)動(dòng)方式的特點(diǎn)和應(yīng)用,對(duì)于電機(jī)控制系統(tǒng)的設(shè)計(jì)和維護(hù)至關(guān)重要,它們就像是工匠精心打磨的工具,能夠幫助我們更好地駕馭電機(jī),完成各項(xiàng)復(fù)雜的任務(wù)。
-
直流電機(jī)
+關(guān)注
關(guān)注
36文章
1733瀏覽量
71632 -
工業(yè)控制
+關(guān)注
關(guān)注
38文章
1536瀏覽量
86875 -
H橋驅(qū)動(dòng)
+關(guān)注
關(guān)注
1文章
22瀏覽量
10984
發(fā)布評(píng)論請(qǐng)先 登錄
8550 H橋直流電機(jī)驅(qū)動(dòng)問(wèn)題?
直流電機(jī)驅(qū)動(dòng)——H 橋功率驅(qū)動(dòng)電路的設(shè)計(jì)及驅(qū)動(dòng)原理
正反轉(zhuǎn)直流電機(jī)驅(qū)動(dòng)電路
有刷直流電機(jī)使用H橋電路PWM驅(qū)動(dòng)方法

有刷直流電機(jī)PWM驅(qū)動(dòng)方法的H橋恒流驅(qū)動(dòng)
Arduino-雙H橋直流電機(jī)驅(qū)動(dòng)板

【電機(jī)驅(qū)動(dòng)芯片(H橋、直流電機(jī)驅(qū)動(dòng)方式)——DRV8833、TB6612、A4950、L298N的詳解與比較】
有刷直流電機(jī)的PWM驅(qū)動(dòng)原理
直流電機(jī)H橋驅(qū)動(dòng)/雙路驅(qū)動(dòng)資料分享
驅(qū)動(dòng)有刷直流電機(jī)的簡(jiǎn)便方法
使用H橋電路驅(qū)動(dòng)有刷直流電機(jī)的原理
如何驅(qū)動(dòng)直流電機(jī)H橋驅(qū)動(dòng)筆記





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論