 伺服電機驅動器電路圖分享
伺服電機驅動器電路圖分享
什么是伺服電機驅動器?
伺服電機驅動器是一種電子設備或電路,用于控制伺服電機的運動。伺服電機驅動器接收來自控制系統的命令信號,并將這些信號轉換為對伺服電機的控制信號,以產生與命令信號成比例的運動。
伺服電機驅動器的工作原理是基于反饋控制原理,通過比較電機的實際位置、速度和力矩等參數與命令信號的差值,不斷調整電機的輸入電壓或電流,以實現電機的精確控制。具體來說,伺服電機驅動器包括控制器、功率驅動器和電機本身三個部分。控制器負責接收命令信號,并生成相應的控制信號;功率驅動器將控制信號放大后傳輸給電機;電機根據控制信號產生相應的運動。同時,電機上的傳感器將電機的實際狀態反饋給驅動器,驅動器將實際狀態與命令狀態進行比較,并調整控制信號以糾正任何偏差。
伺服電機驅動器廣泛應用于各種需要高精度定位和運動的場合,如數控機床、機器人、包裝機械、電子設備等。由于伺服電機驅動器能夠實現高精度的位置和速度控制,因此在制造業、航空航天、醫療器械等領域中有著廣泛的應用。此外,伺服電機驅動器還可以用于實現電機的調速、過載保護、自動跟蹤等功能,提高設備的自動化和智能化水平。
總之,伺服電機驅動器是一種重要的電子設備或電路,能夠實現高精度的位置和速度控制,廣泛應用于各種領域中。
接下來小編給大家分享一些伺服電機驅動器電路圖,以及簡單分析它們的工作原理。
伺服電機驅動器電路圖分享
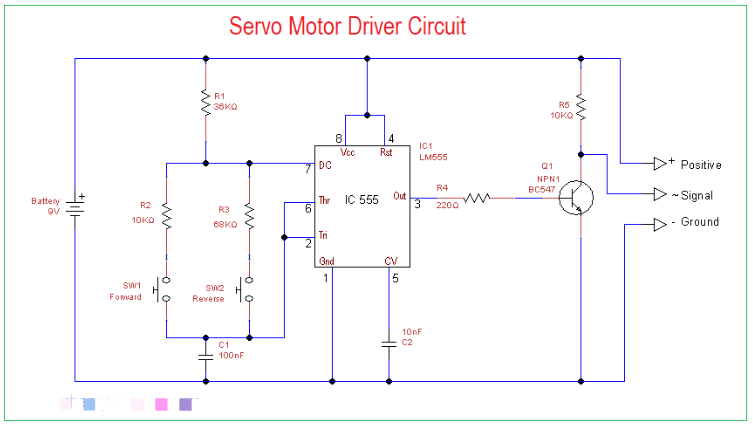
采用定時器IC 555的伺服電機驅動器電路圖(1)
伺服電機用于精確控制角度或線性位置、速度和加速度。這些伺服電機被稱為旋轉執行器或線性執行器。伺服系統可以包含用于位置反饋的傳感器和用于位置控制的信號輸入。伺服電機有不同的尺寸和額定電壓。所有伺服電機的工作方式相同,但輸出量取決于尺寸和規格。
這里以亞微型伺服電機為目標設備,我們為該電機開發了伺服電機驅動電路。伺服電機廣泛用??于不同類型的應用,適合基于運動或旋轉的機電一體化需求。
每個伺服電機都有三個端子,一個用于正電源,一個用于接地電源,另一個用于位置控制信號輸入。
該電路的目的是給出PWM(脈沖寬度調制)信號輸出,利用這種不同占空比的PWM脈沖,我們可以控制伺服電機的旋轉和位置。
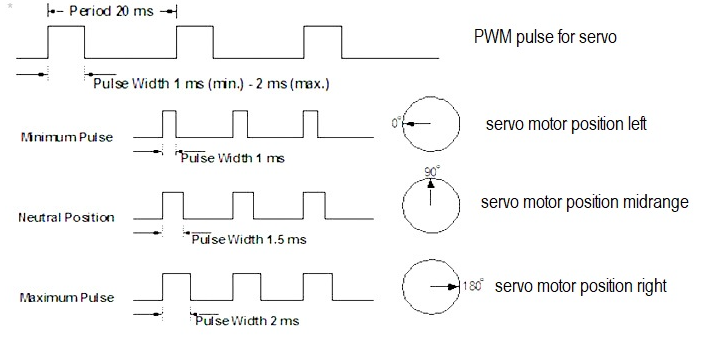
此圖用于了解基于 PWM 信號的伺服旋轉。考慮周期為 20ms 的信號,高脈沖持續時間為 1ms(最小值)和 2ms(最大值),取決于 HIGH 脈沖信號持續時間伺服電機旋轉的變化。
這里定時器IC 555用作非穩態多諧振蕩器,它在輸出時產生具有兩個不同脈沖持續時間的脈沖,我們知道555中的輸出脈沖時間取決于定時電阻器和定時電容器。
這里 RA 是 R1 電阻器,RB 是 R2 或 R3,具體取決于按下的按鈕 (SW),僅適用于該電路。
當開關SW1閉合時,555定時器IC產生長持續時間高脈沖,舵機朝正確方向旋轉。當開關SW2閉合時,555定時器IC產生短持續時間的高脈沖,舵機向左方向旋轉。
采用定時器IC 555的伺服電機驅動器電路圖(2)
伺服電機廣泛應用于機器人、工業、計算機、門、玩具等領域。但與一般直流電機不同的是,我們可以控制伺服電機的角度。使用該電機可以實現更精確的運動。但伺服系統需要特殊的電路才能運行。這就是上述伺服電機驅動電路發揮作用的地方,該電路使用 IC 555 來執行這項工作。
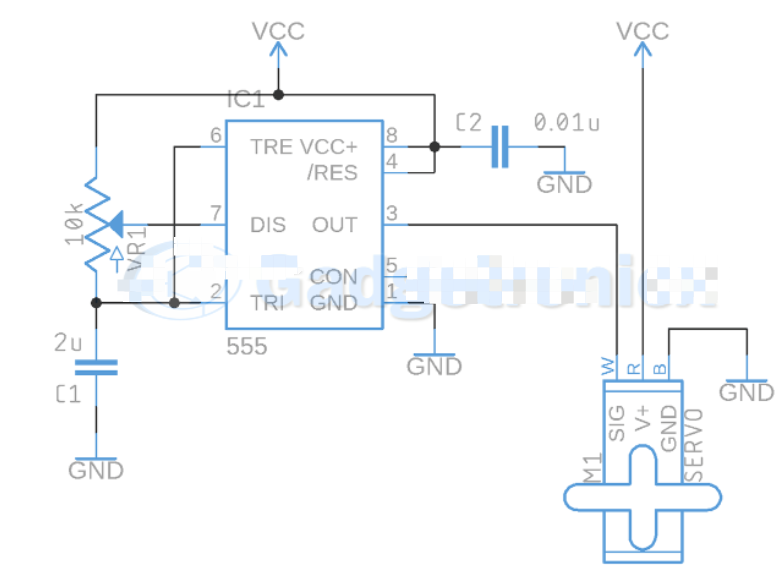
伺服電機無非是一種可以通過控制信號調整其位置的直流電機。在這里,我們需要將 GND 和電壓源連接到電機,并構建一個電子電路來向電機提供控制信號。這使我們能夠控制電機。為此,伺服電機使用 PWM 信號來調整其位置,因此我們使用配置為 Astable Multivibrator 的 555 定時器。在這個 Astable 配置中,我們使用電位器來生成 20ms 時間周期的 PWM 信號。
我們選擇 10k 歐姆的電位器。如果我們將電位計設置為最大 10kOhm,則意味著我們將需要一個 2uF 電容器,因此我們現在可以調整 PWM 的占空比。這控制了伺服電機的位置,因為 Servo 讀取大約 20ms 的 PWM 信號的占空比來調整其位置。 PWM信號ON時間的長短決定舵機轉動的角度。因此電位計值的變化將改變輸出信號的ON時間段,從而改變旋轉角度(45°或90°或180°)。
-
電路圖
+關注
關注
10387文章
10729瀏覽量
538661 -
驅動器
+關注
關注
54文章
8476瀏覽量
148507 -
定時器
+關注
關注
23文章
3272瀏覽量
116618 -
伺服電機
+關注
關注
86文章
2088瀏覽量
58940
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論