 EtherCAT運動控制器在LabVIEW中的運動控制與實時數據采集
EtherCAT運動控制器在LabVIEW中的運動控制與實時數據采集

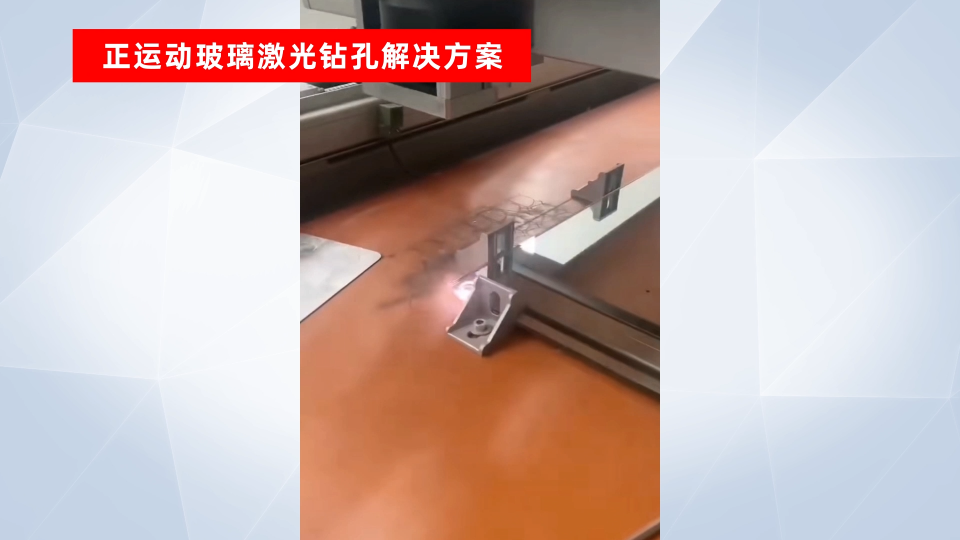
本文以正運動技術EtherCAT運動控制器ZMC408CE為例,介紹如何使用LabVIEW對控制器參數進行獲取內容并生成示波器波形。
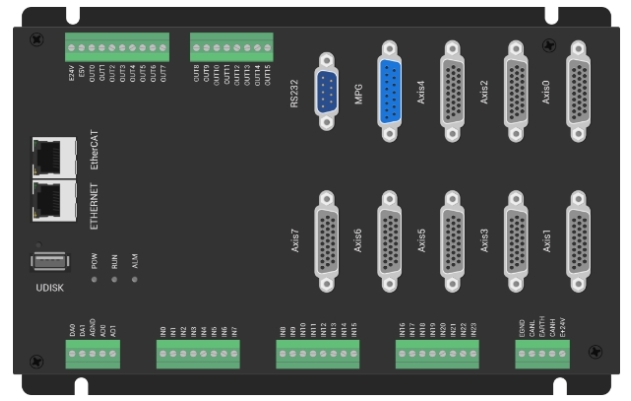
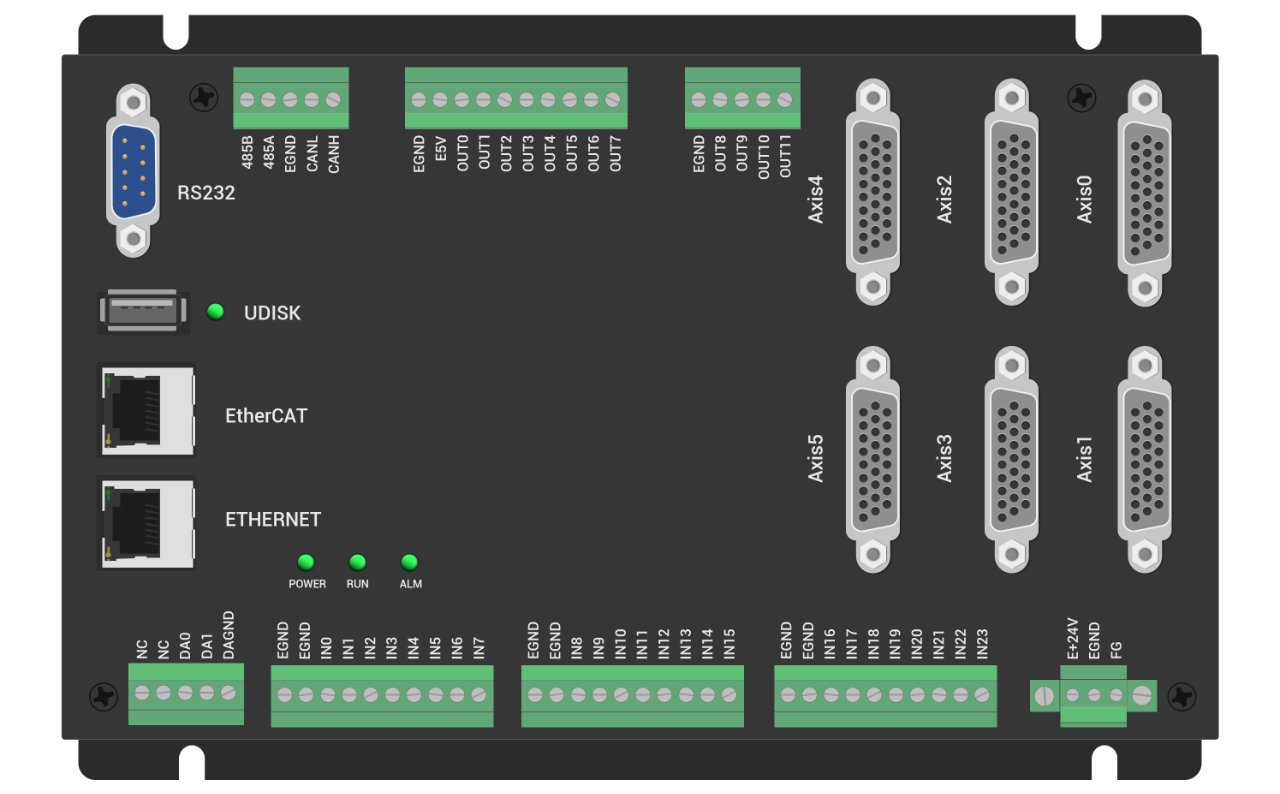
01 ZMC408CE硬件介紹
ZMC408CE是正運動推出的一款多軸高性能EtherCAT總線運動控制器,具有EtherCAT、EtherNET、RS232、CAN和U盤等通訊接口,ZMC系列運動控制器可應用于各種需要脫機或聯機運行的場合。

ZMC408CE支持8軸運動控制,最多可擴展至32軸,支持直線插補、任意圓弧插補、空間圓弧、螺旋插補、電子凸輪、電子齒輪、同步跟隨等功能。ZMC408CE支持PLC、Basic、HMI組態三種編程方式。PC上位機API編程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。

ZMC408CE支持8軸運動控制,可采用脈沖軸(帶編碼器反饋)或EtherCAT總線軸,通用IO包含24路輸入口和16路輸出口,部分IO為高速IO,模擬量AD/DA各兩路,EtherCAT最快125us的刷新周期。
ZMC408CE支持8個通道的硬件比較輸出、硬件定時器、運動中精準輸出,還支持8通道PWM輸出,對應的輸出口為OUT0-7,支持8個通道同時觸發硬件比較輸出。
02 LabVIEW進行運動控制開發
1、創建LabVIEW項目。
2.將“光盤資料”里面LabVIEW的Vi函數庫“zauxdll”文件夾下載到電腦中,然后復制到LabVIEW安裝路徑下LabVIEW/user.lib的文件夾內。

Zauxdll函數庫路徑
Zauxdll函數庫粘貼路徑
3、相關PC函數介紹。
PC函數手冊也在光盤資料里面,具體路徑如下:“光盤資料8.PC函數函數庫2.1ZMotion函數庫編程手冊 V2.1.pdf”。
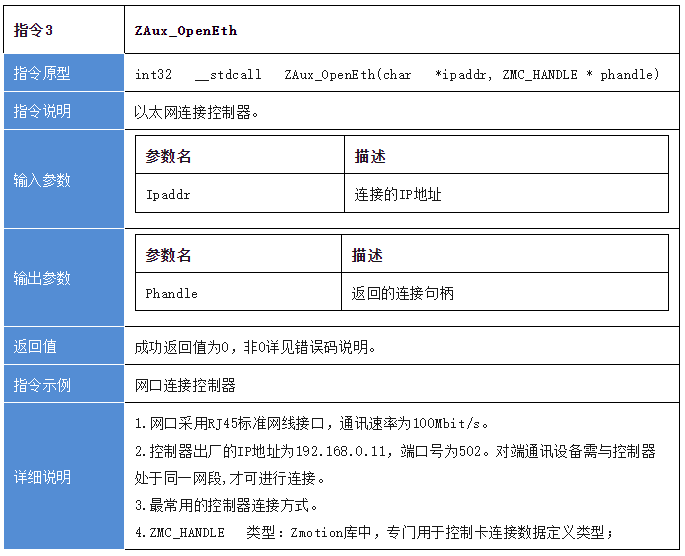
(1)ZAux_OpenEth()接口說明。
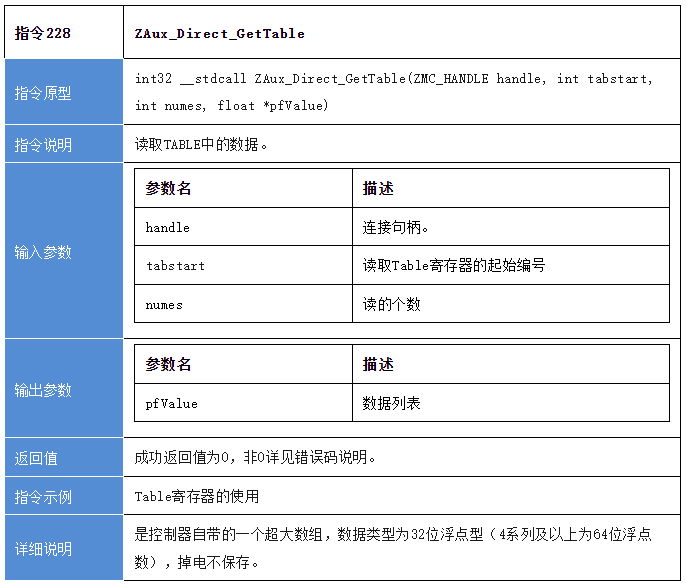
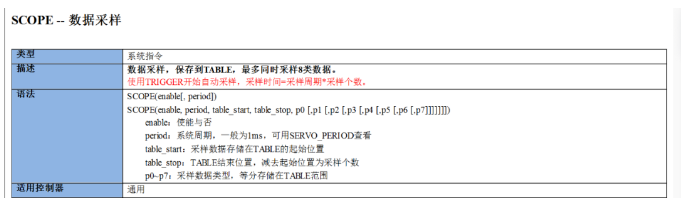
(2)獲取table寄存器內容,導入示波器數據源。
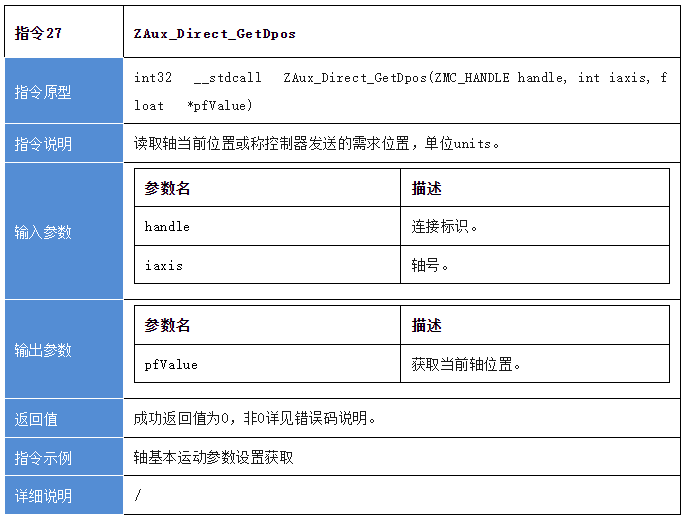
(3)獲取規劃位置。
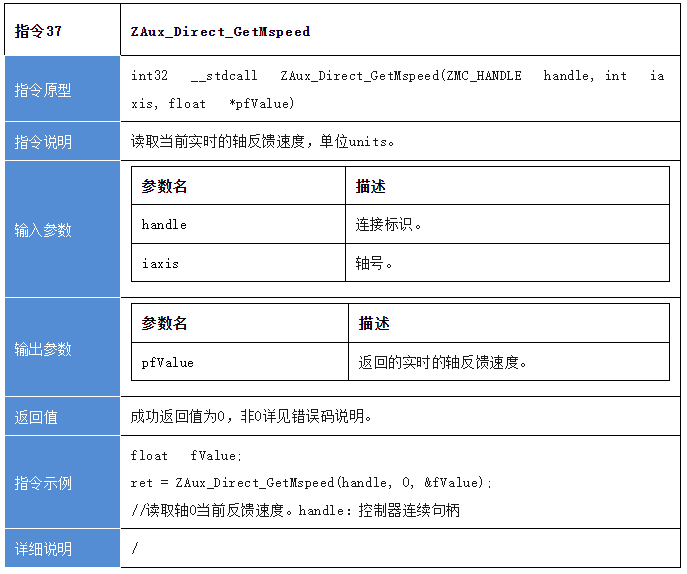
(4)獲取反饋速度。
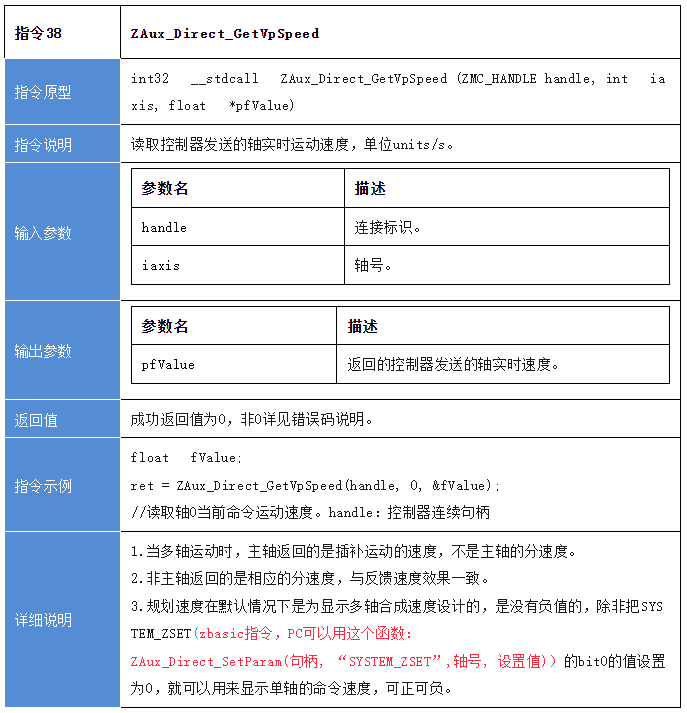
(5)獲取規劃速度。
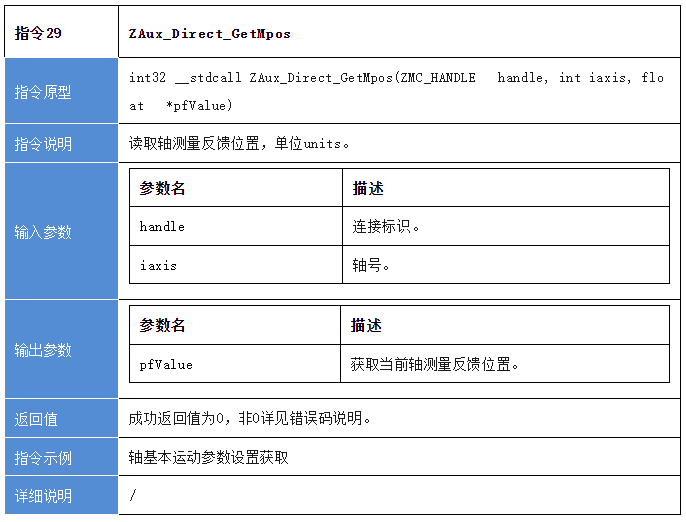
(6)獲取反饋位置。
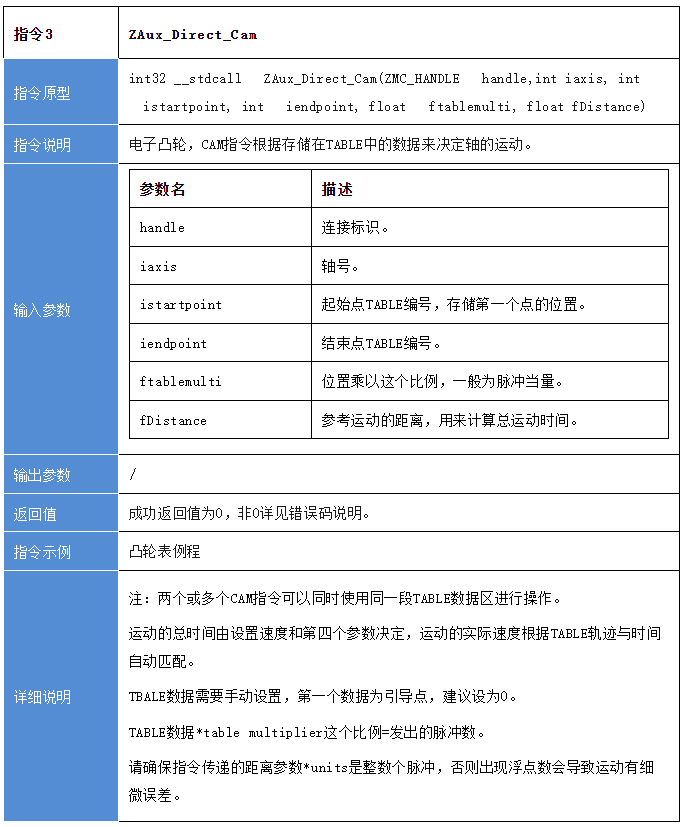
(7)電子凸輪運動。
4、LabVIEW進行運動控制的數據采集數據源獲取。
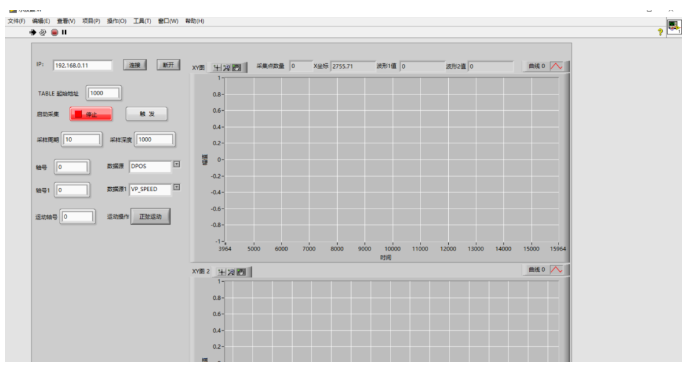
(1)新建Vi,在前面板,右鍵鼠標,選擇控件進行UI設計,如圖所示,左邊是連接界面以及獲取點數、數據源等,右邊是示波器圖形規劃的位置。
(2)在程序編輯框中通過鼠標,在添加的幀里面添加“While循環”,在“While循環”里面又添加“事件結構”,右擊選擇添加事件分支,選擇“超時”事件,獲取當前獲取到數據源的采樣點數,并將數據源數據導入到示波器中按波形顯示出來。
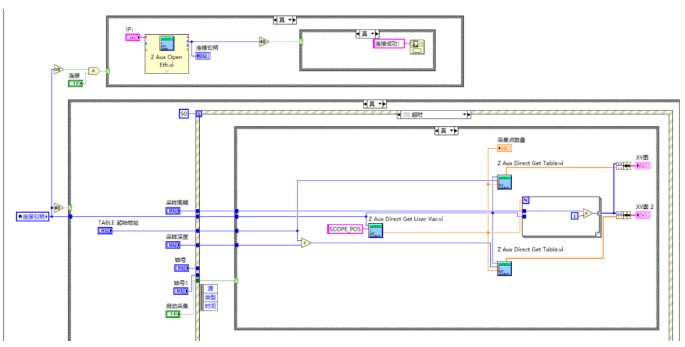
(3)選擇事件結構,右擊選擇添加事件分支,在循環結構中,當句柄為空時自動進行獲取當前ip的控制器,然后在該事件分支中使用“Z Aux Open Eth.vi”函數對控制器進行連接,以實現連接控制器按鈕的功能。

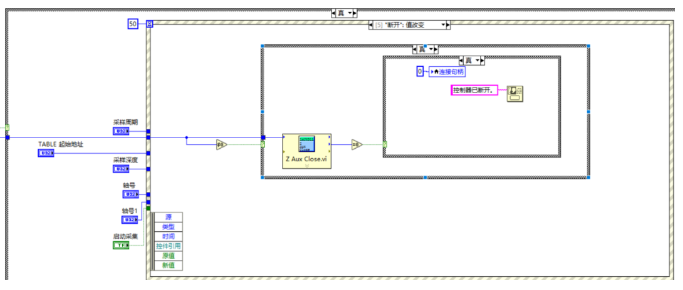
(4)選擇事件結構,右擊選擇添加事件分支,選擇“斷開”值改變,然后在該事件分支中使用“Z Aux Close.vi”函數對控制器斷開連接,以實現斷開鏈接按鈕的功能。
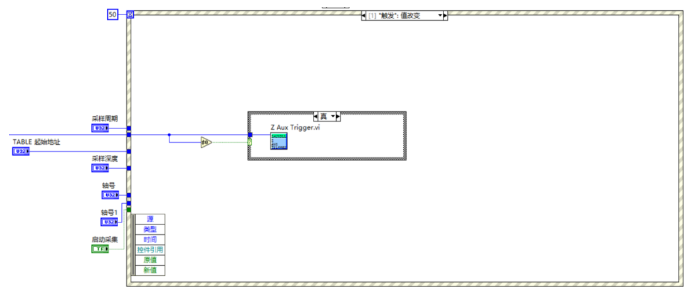
(5)選擇事件結構,右擊選擇添加事件分支,選擇“觸發”值改變,然后在該事件分支中使用“Z Aux Trigger.vi”函數進行觸發示波器抓取,以實現觸發指令抓取數據源將數據存儲到table寄存器中。
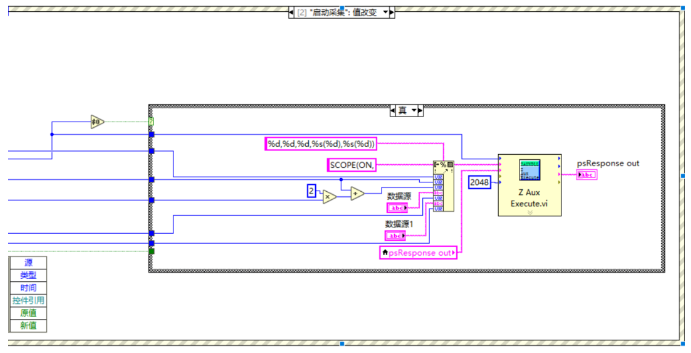
(6)選擇事件結構,右擊選擇添加事件分支,選擇“啟動采集”值改變,然后在該事件分支中使用“Z Aux Execute.vi”函數調用指令SCOPE進行啟動獲取數據源數據,存放到table寄存器中。
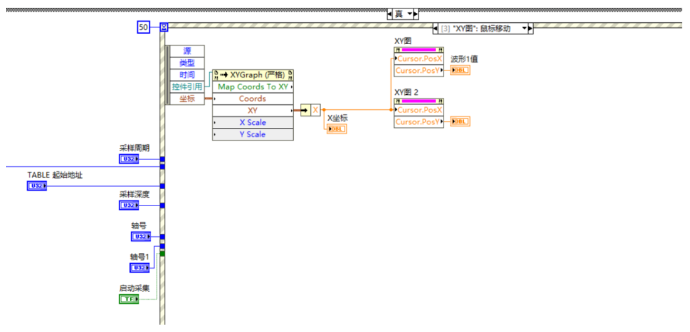
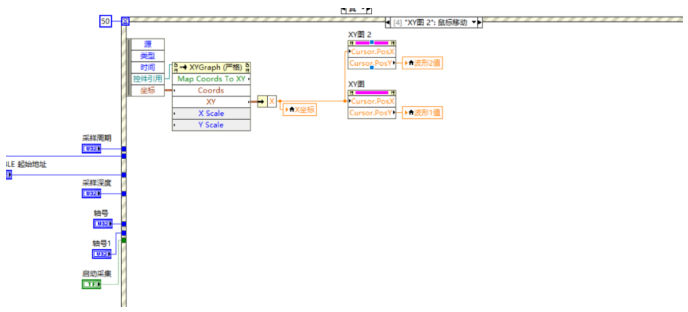
(7)選擇事件結構,右擊選擇事件,選擇“XY圖:”鼠標改變,然后在該事件分支實時讀取XY示波器以及XY2示波器對應范圍內鼠標的坐標位置,并顯示在界面上。
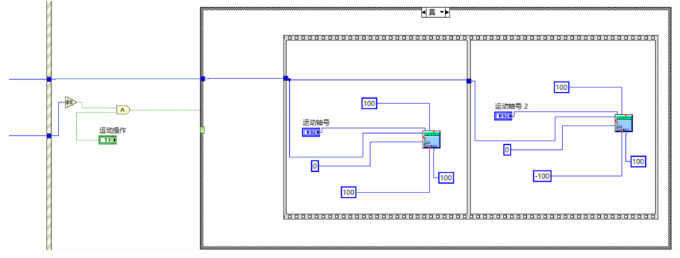
(8)選擇條件結構,當正弦運動按鈕按下時兩段觸發正弦運動使用平鋪順序結構按順序執行兩段電子凸輪運動指令,使用“Z Aux Cam.vi”函數按照提前加載在table寄存器內的數據進行對應電子凸輪運動。
03 調試與監控
編譯運行例程,同時連接ZDevelop軟件,并對應使用單軸小例程運動一個正弦波形軌跡,進行抓取波形進行對比LabVIEW示波器波形以及ZDevelop軟件波形對比。
1.生成正弦波形數據的算法指令如下。
DIM num_p,scale,m,t '變量定義 num_p=100 scale=500 FOR p=0 TO num_p TABLE(p,((-SIN(PI*2*p/num_p)/(PI*2))+p/num_p)*scale) 'table存儲凸輪表運動參數 NEXT
2、ZDevelop軟件示波器波形如下圖所示。
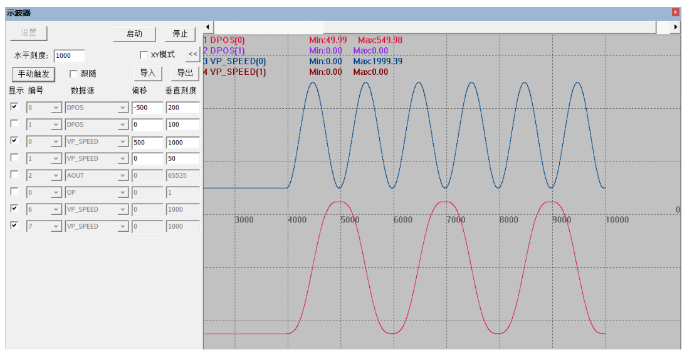
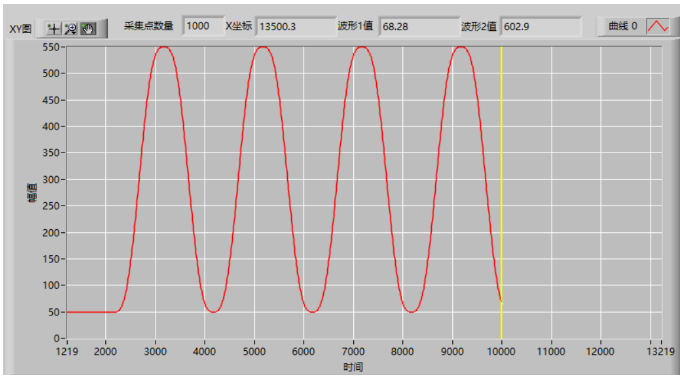
3、LabVIEW示波器波形,示波器數據源是DPOS數據內容,與ZDevelop軟件示波器dpos波形一致。
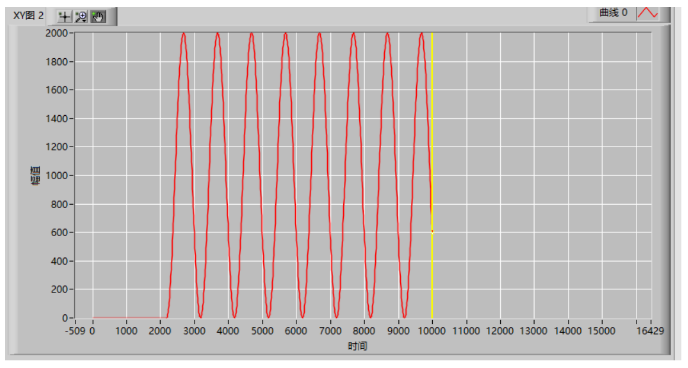
4、LabVIEW示波器波形,示波器數據源是VP_Speed數據內容,與ZDevelop軟件示波器VP_speed波形一致。
本次,正運動技術EtherCAT運動控制器在LabVIEW中的運動控制與實時數據采集,就分享到這里。
更多精彩內容請關注“正運動小助手”公眾號,需要相關開發環境與例程代碼,請咨詢正運動技術銷售工程師。
本文由正運動技術原創,歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
審核編輯 黃宇
-
LabVIEW
+關注
關注
2000文章
3670瀏覽量
335343 -
運動控制器
+關注
關注
2文章
449瀏覽量
25249 -
數據采集
+關注
關注
40文章
7138瀏覽量
116357 -
ethercat
+關注
關注
19文章
1096瀏覽量
39952
發布評論請先 登錄














 工商網監
工商網監
評論