") 如何同步運(yùn)行?--基于EtherCAT的柔性電機(jī)驅(qū)動(dòng)系統(tǒng)
如何同步運(yùn)行?--基于EtherCAT的柔性電機(jī)驅(qū)動(dòng)系統(tǒng)
在自動(dòng)化生產(chǎn)線中,EtherCAT網(wǎng)絡(luò)輕松實(shí)現(xiàn)了過去難以同步控制的成百上千個(gè)電機(jī),如流水線等。本文將探討如何通過柔性電機(jī)驅(qū)動(dòng)系統(tǒng),在EtherCAT網(wǎng)絡(luò)環(huán)境中實(shí)現(xiàn)對(duì)多電機(jī)的精確控制。
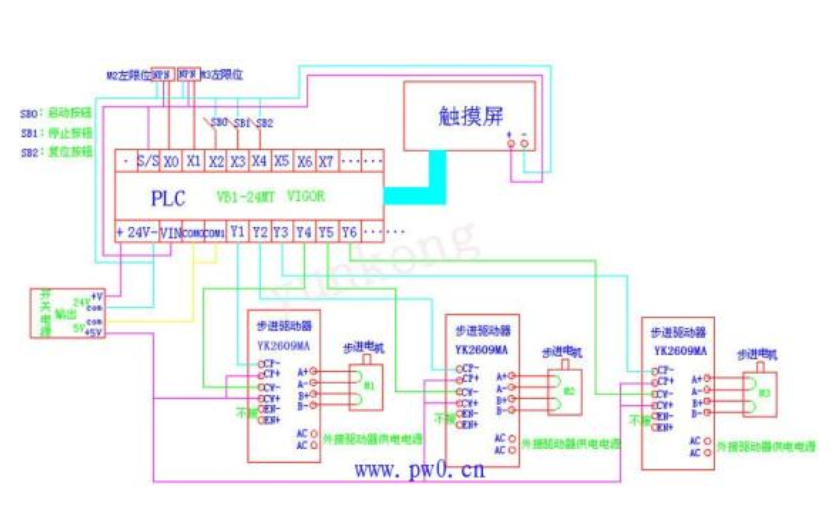
 ?脈沖信號(hào)傳統(tǒng)的伺服電機(jī)采用I/O脈沖信號(hào)控制,主站發(fā)一個(gè)脈沖,電機(jī)走一步。這種驅(qū)動(dòng)器,引線太多、連接不可靠,而且主站也沒辦法擴(kuò)展出成百上千組信號(hào)出來!
?脈沖信號(hào)傳統(tǒng)的伺服電機(jī)采用I/O脈沖信號(hào)控制,主站發(fā)一個(gè)脈沖,電機(jī)走一步。這種驅(qū)動(dòng)器,引線太多、連接不可靠,而且主站也沒辦法擴(kuò)展出成百上千組信號(hào)出來! ?CAN總線既然I/O脈沖控制接線多、又不能控制太多電機(jī),那能否使用總線統(tǒng)一控制?答案是可以!首先流行起來是CAN總線。CAN總線的時(shí)間同步是通過在總線上傳輸時(shí)間戳來實(shí)現(xiàn),能保證總線上的全部從節(jié)點(diǎn)統(tǒng)一時(shí)間處理數(shù)據(jù)!但CAN總線理論上最多只支持110個(gè)從節(jié)點(diǎn),在實(shí)際應(yīng)用中,由于電氣特性的限制,通常不能多于100個(gè)節(jié)點(diǎn)。而且數(shù)據(jù)傳輸速度也不高,常用的CAN2.0A在超高速模式下才1Mbps。這些也導(dǎo)致滿足不了數(shù)百個(gè)電機(jī)驅(qū)動(dòng)器的同步要求。但在CAN總線的使用中,CANopen協(xié)議應(yīng)運(yùn)而生。CANopen中最重要的通訊協(xié)議棧是DS301,而DS402是在DS301基礎(chǔ)之上拓展出的伺服類控制協(xié)議。DS402把一個(gè)伺服控制系統(tǒng)應(yīng)該具有的功能都定義好了,廠家和使用者按照協(xié)議即可開發(fā)和使用符合標(biāo)準(zhǔn)的設(shè)備。正是有了DS402協(xié)議標(biāo)準(zhǔn),為后面的EtherCAT總線鋪平了伺服控制的道路。 ?EtherCAT總線EtherCAT是一個(gè)開發(fā)的架構(gòu),基于太網(wǎng)為基礎(chǔ)的現(xiàn)場(chǎng)總線系統(tǒng)。具有以下優(yōu)點(diǎn):
?CAN總線既然I/O脈沖控制接線多、又不能控制太多電機(jī),那能否使用總線統(tǒng)一控制?答案是可以!首先流行起來是CAN總線。CAN總線的時(shí)間同步是通過在總線上傳輸時(shí)間戳來實(shí)現(xiàn),能保證總線上的全部從節(jié)點(diǎn)統(tǒng)一時(shí)間處理數(shù)據(jù)!但CAN總線理論上最多只支持110個(gè)從節(jié)點(diǎn),在實(shí)際應(yīng)用中,由于電氣特性的限制,通常不能多于100個(gè)節(jié)點(diǎn)。而且數(shù)據(jù)傳輸速度也不高,常用的CAN2.0A在超高速模式下才1Mbps。這些也導(dǎo)致滿足不了數(shù)百個(gè)電機(jī)驅(qū)動(dòng)器的同步要求。但在CAN總線的使用中,CANopen協(xié)議應(yīng)運(yùn)而生。CANopen中最重要的通訊協(xié)議棧是DS301,而DS402是在DS301基礎(chǔ)之上拓展出的伺服類控制協(xié)議。DS402把一個(gè)伺服控制系統(tǒng)應(yīng)該具有的功能都定義好了,廠家和使用者按照協(xié)議即可開發(fā)和使用符合標(biāo)準(zhǔn)的設(shè)備。正是有了DS402協(xié)議標(biāo)準(zhǔn),為后面的EtherCAT總線鋪平了伺服控制的道路。 ?EtherCAT總線EtherCAT是一個(gè)開發(fā)的架構(gòu),基于太網(wǎng)為基礎(chǔ)的現(xiàn)場(chǎng)總線系統(tǒng)。具有以下優(yōu)點(diǎn):
- 高速傳輸,使用雙絞線或光線,可以在30uS內(nèi)處理1000個(gè)分布式I/O信號(hào),或在100uS內(nèi)處理100個(gè)電機(jī)軸。
- 精確同步,具有納秒級(jí)別的同步性,協(xié)議棧處理延遲僅需幾納秒。
- 靈活拓?fù)?/strong>,EtherCAT網(wǎng)絡(luò)最多可支持65535個(gè)從設(shè)備,且對(duì)拓?fù)涞慕Y(jié)構(gòu)沒有限制,線性、樹形、星型等拓?fù)涠贾С帧?/li>
對(duì)于通訊協(xié)議,CANopen被直接移植到EtherCAT總線上使用,稱為COE(CANopen over EtherCAT)。對(duì)于電機(jī)控制,CANopen下的DS402協(xié)議被順理成章地使用。在CAN總線上數(shù)據(jù)傳輸速度不高、節(jié)點(diǎn)不能多、同步性一般的問題都被迎刃而解。
?柔性電機(jī)驅(qū)動(dòng)系統(tǒng)致遠(yuǎn)電子推出柔性電機(jī)驅(qū)動(dòng)系統(tǒng),能滿足個(gè)性化的接口需求。該系統(tǒng)采用EtherCAT為網(wǎng)絡(luò),從站模塊面積59mm*50mm,采用40腳標(biāo)準(zhǔn)排針接口。電機(jī)驅(qū)動(dòng)、I/O、模擬采集、電源、耦合器等多種模塊選擇。用戶按需制作分線底板即可,從站板插在底板上通過EtherCAT網(wǎng)絡(luò)級(jí)聯(lián),最多支持255個(gè)。
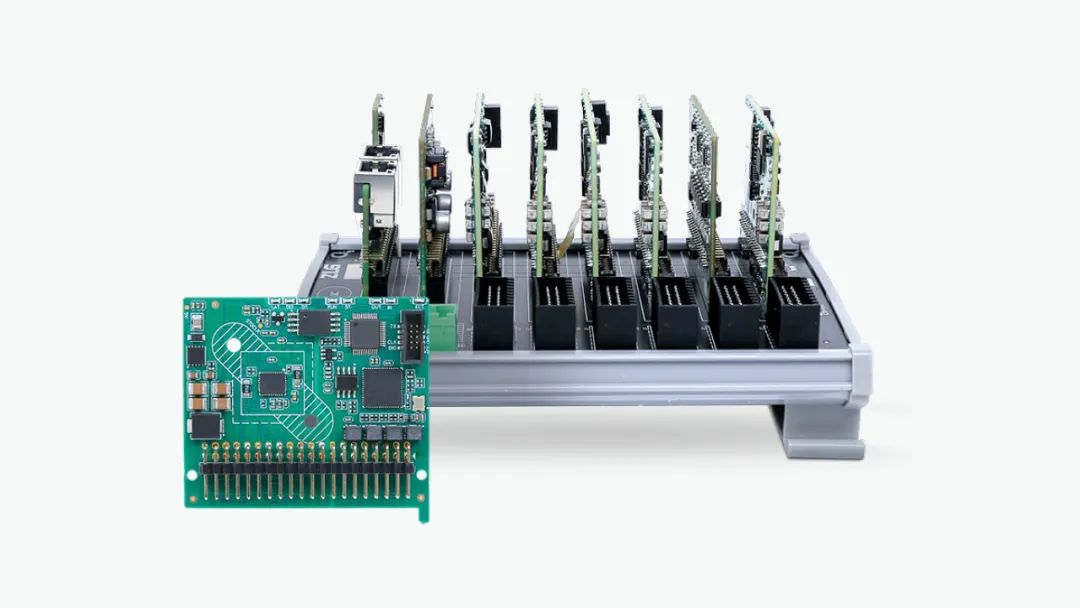
圖3ZMD-E1050ETC步進(jìn)電機(jī)驅(qū)動(dòng)模塊
- 24V~48V/1.5A的兩相步進(jìn)電機(jī);
- 1/2/4/8/16/32/64/128/256細(xì)分選擇;
- CiA402運(yùn)動(dòng)控制協(xié)議,支持CSP/PP/HM/PV模式;
- 3個(gè)數(shù)字輸入,1組ABZ正交編碼輸入;
- 開環(huán)或編碼器閉環(huán)控制可選。
理論上只要底板做得足夠大,就可以串接數(shù)百個(gè)步進(jìn)電機(jī)驅(qū)動(dòng)模塊。但是為了提高可靠性和易用性,每個(gè)底板通常只安裝10~50個(gè)電機(jī)模塊或其他功能的模塊;并通過ZPWB-240302電源模塊給EtherCAT部分獨(dú)立供電;然后通過ZCPB-80600 EtherCAT耦合器,用網(wǎng)線接通上級(jí)和下級(jí)的底板;最后形成數(shù)百個(gè)的電機(jī)驅(qū)動(dòng)系統(tǒng)。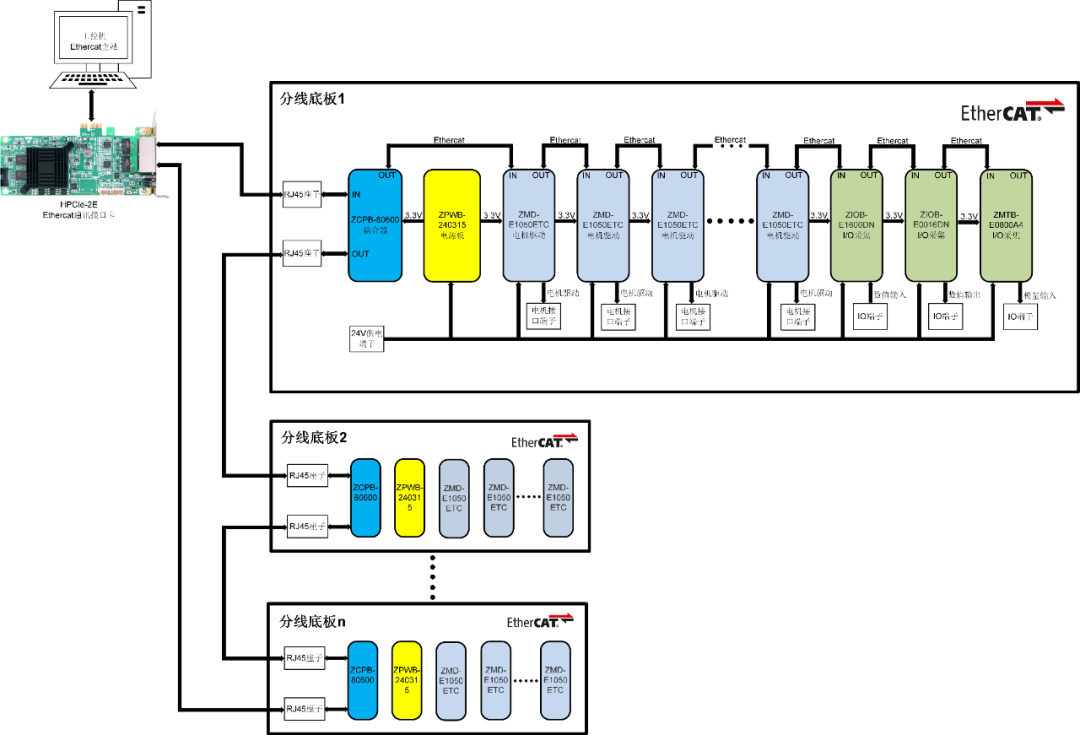
圖4
后面的專題,我們將剖析DS402協(xié)議中的兩種位置控制模式CSP和PP,如何在柔性電機(jī)驅(qū)動(dòng)系統(tǒng)中發(fā)揮作用。敬請(qǐng)留意。表1電機(jī)模組選型表
表2I/O模組選型表

-
電機(jī)驅(qū)動(dòng)
+關(guān)注
關(guān)注
60文章
1294瀏覽量
87549 -
驅(qū)動(dòng)系統(tǒng)
+關(guān)注
關(guān)注
3文章
385瀏覽量
27775 -
ethercat
+關(guān)注
關(guān)注
19文章
997瀏覽量
39629
發(fā)布評(píng)論請(qǐng)先 登錄
ethercat總線伺服如何控制 EtherCAT運(yùn)行原理
基于全志T507-H的Igh EtherCAT主站案例分享
TMC8670 – 集成EtherCAT通訊和FOC伺服運(yùn)動(dòng)控制芯片適用2/3相永磁同步電機(jī)
如何實(shí)現(xiàn)從網(wǎng)絡(luò)主機(jī)直至電機(jī)終端的全程同步
資料下載:在CODESYS中通過EtherCAT總線驅(qū)動(dòng)單個(gè)電機(jī)
在CODESYS中怎樣通過EtherCAT總線去驅(qū)動(dòng)單個(gè)電機(jī)呢
開源!ZYNQ IgH EtherCAT主站方案分享
基于FPGA的新型高性能永磁同步電機(jī)驅(qū)動(dòng)系統(tǒng)設(shè)計(jì)
伺服電機(jī)間同步傳動(dòng)的柔性化控制

基于STM32的大扭矩永磁同步電機(jī)驅(qū)動(dòng)系統(tǒng)
多級(jí)電機(jī)同步驅(qū)動(dòng)系統(tǒng)的特點(diǎn)及其控制系統(tǒng)的設(shè)計(jì)
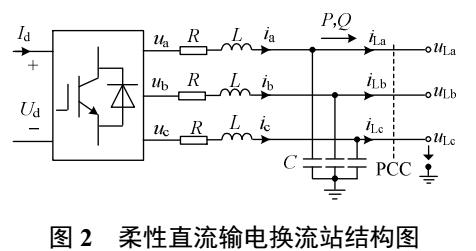
柔性直流輸電換流站的同步電機(jī)模擬
如何使用一個(gè)PLC控制兩個(gè)或多個(gè)伺服電機(jī)同步運(yùn)行
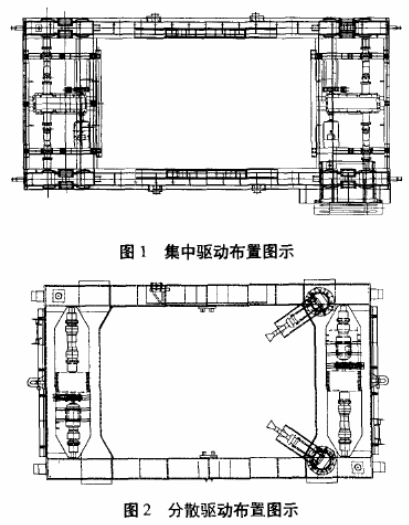
采用西門子S7400系列PLC與變頻器解決分散驅(qū)動(dòng)電機(jī)同步運(yùn)行問題
如何優(yōu)化電機(jī)驅(qū)動(dòng)系統(tǒng) 電機(jī)與驅(qū)動(dòng)的通信協(xié)議探討





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論