") 雙極性步進(jìn)電機(jī)的結(jié)構(gòu)與控制模式
雙極性步進(jìn)電機(jī)的結(jié)構(gòu)與控制模式
一、引言
在現(xiàn)代工業(yè)控制領(lǐng)域,步進(jìn)電機(jī)以其獨特的步進(jìn)特性和精確的位置控制而備受青睞。其中,雙極性步進(jìn)電機(jī)作為步進(jìn)電機(jī)的一種重要類型,憑借其高效、可靠的性能,在自動化生產(chǎn)線、精密測量儀器等多個領(lǐng)域得到了廣泛應(yīng)用。本文將對雙極性步進(jìn)電機(jī)的結(jié)構(gòu)和控制模式進(jìn)行詳細(xì)介紹,旨在為讀者提供深入的了解和認(rèn)識。
二、雙極性步進(jìn)電機(jī)的結(jié)構(gòu)
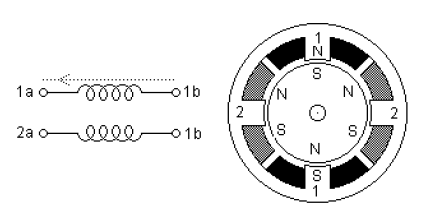
雙極性步進(jìn)電機(jī),又稱兩相四線步進(jìn)電機(jī),其基本結(jié)構(gòu)包括定子、轉(zhuǎn)子和繞組三大部分。
定子
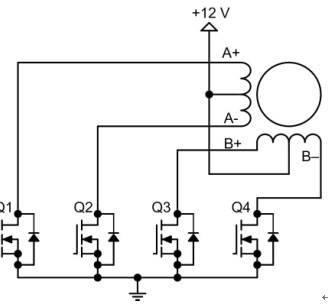
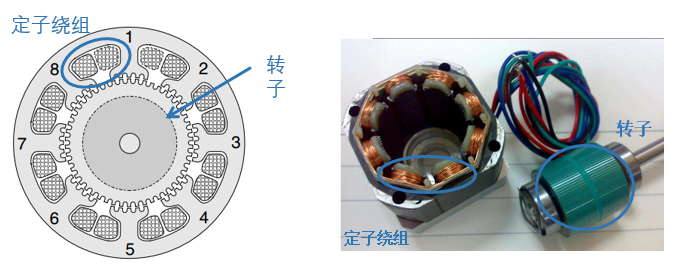
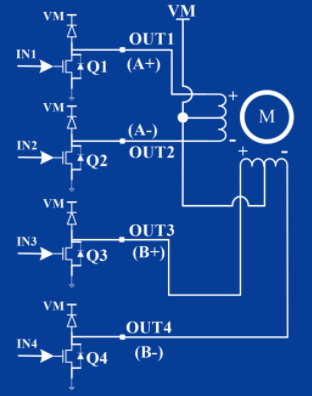
定子是雙極性步進(jìn)電機(jī)的靜止部分,通常由多個定子齒組成。在雙極性步進(jìn)電機(jī)中,定子齒上繞有兩相雙極性繞組,即A相繞組和B相繞組。這兩相繞組分別由不同的線圈構(gòu)成,每個線圈都有兩條線,共計四條線,用于控制電機(jī)的運行。
具體來說,A相繞組從定子齒1開始繞制,依次繞到定子齒3、5、7上,其中定子齒1和5的繞線方向相同,而定子齒3和7的繞線方向相同。這兩組(定子齒1和5,以及定子齒3和7)的繞線方向相反。B相繞組也是以同樣的原理進(jìn)行繞制,其中定子齒4和8為一組,定子齒2和6為一組。
轉(zhuǎn)子
轉(zhuǎn)子是雙極性步進(jìn)電機(jī)的旋轉(zhuǎn)部分,通常貼有軸向充磁的永磁體。永磁體的磁力線在電機(jī)本體內(nèi)形成閉合,使得轉(zhuǎn)子在不通電的情況下也具有一定的鎖定力矩。此外,轉(zhuǎn)子上通常擁有多個齒(如50個齒),與定子齒相對應(yīng),以實現(xiàn)精確的步進(jìn)角度(如1.8°步進(jìn)角度)。
繞組
雙極性步進(jìn)電機(jī)的繞組是實現(xiàn)電機(jī)運動的關(guān)鍵部分。由于雙極性步進(jìn)電機(jī)具有兩個獨立的線圈,每個線圈都可以實現(xiàn)兩個方向通電,因此各繞組的某一端既可以是N極也可以是S極。這種設(shè)計使得雙極性步進(jìn)電機(jī)在控制方式上更為靈活,可以實現(xiàn)更精確的位置控制和更高的動態(tài)性能。
三、雙極性步進(jìn)電機(jī)的控制模式
雙極性步進(jìn)電機(jī)的控制模式主要包括單相步進(jìn)、整步步進(jìn)和半步步進(jìn)三種。
單相步進(jìn)
單相步進(jìn)是雙極性步進(jìn)電機(jī)最基本的控制模式。在這種模式下,A相和B相繞組按照一定的順序依次通電,使得定子磁場相應(yīng)地發(fā)生變化,從而驅(qū)動轉(zhuǎn)子轉(zhuǎn)動。具體來說,當(dāng)A相繞組通電時,轉(zhuǎn)子會向一個方向轉(zhuǎn)動;當(dāng)B相繞組通電時,轉(zhuǎn)子會向另一個方向轉(zhuǎn)動。通過交替控制A相和B相繞組的通電狀態(tài),可以實現(xiàn)轉(zhuǎn)子的連續(xù)轉(zhuǎn)動。
單相步進(jìn)模式雖然簡單易懂,但由于其步進(jìn)角度較大(通常為1.8°),因此在需要更高精度控制的場合中可能無法滿足要求。
整步步進(jìn)
整步步進(jìn)是雙極性步進(jìn)電機(jī)中較為常用的控制模式之一。在這種模式下,A相和B相繞組同時通電或同時斷電,以實現(xiàn)轉(zhuǎn)子的整步轉(zhuǎn)動。具體來說,當(dāng)A相繞組通電而B相繞組斷電時,轉(zhuǎn)子會向一個方向轉(zhuǎn)動一定的角度;當(dāng)B相繞組通電而A相繞組斷電時,轉(zhuǎn)子會向另一個方向轉(zhuǎn)動相同的角度。通過交替控制A相和B相繞組的通電狀態(tài),可以實現(xiàn)轉(zhuǎn)子的連續(xù)整步轉(zhuǎn)動。
整步步進(jìn)模式具有步進(jìn)角度小、定位精度高等優(yōu)點,因此在需要高精度控制的場合中得到了廣泛應(yīng)用。例如,在打印機(jī)、掃描儀等辦公設(shè)備中,雙極性步進(jìn)電機(jī)通常采用整步步進(jìn)模式來控制打印頭或掃描頭的精確移動。
半步步進(jìn)
半步步進(jìn)是雙極性步進(jìn)電機(jī)中更為精細(xì)的控制模式。在這種模式下,通過同時控制A相和B相繞組中的一部分線圈通電或斷電,可以實現(xiàn)轉(zhuǎn)子的半步轉(zhuǎn)動。具體來說,當(dāng)A相繞組中的一部分線圈通電而B相繞組中的一部分線圈斷電時,轉(zhuǎn)子會向一個方向轉(zhuǎn)動半個步進(jìn)角度;當(dāng)B相繞組中的一部分線圈通電而A相繞組中的一部分線圈斷電時,轉(zhuǎn)子會向另一個方向轉(zhuǎn)動半個步進(jìn)角度。通過交替控制A相和B相繞組中線圈的通電狀態(tài),可以實現(xiàn)轉(zhuǎn)子的連續(xù)半步轉(zhuǎn)動。
半步步進(jìn)模式具有步進(jìn)角度更小、定位精度更高等優(yōu)點,因此在需要更高精度控制的場合中得到了廣泛應(yīng)用。例如,在精密測量儀器、醫(yī)療設(shè)備等領(lǐng)域中,雙極性步進(jìn)電機(jī)通常采用半步步進(jìn)模式來實現(xiàn)更精確的位置控制和運動控制。
四、總結(jié)
雙極性步進(jìn)電機(jī)以其獨特的結(jié)構(gòu)和控制模式,在工業(yè)自動化控制領(lǐng)域中發(fā)揮著重要作用。通過深入了解雙極性步進(jìn)電機(jī)的結(jié)構(gòu)和控制模式,可以更好地掌握其應(yīng)用方法和技巧,為工業(yè)自動化控制技術(shù)的發(fā)展和應(yīng)用提供有力支持。
-
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
152文章
3145瀏覽量
148834 -
工業(yè)控制
+關(guān)注
關(guān)注
38文章
1510瀏覽量
86576 -
雙極性步進(jìn)電機(jī)
+關(guān)注
關(guān)注
0文章
5瀏覽量
1024
發(fā)布評論請先 登錄
相關(guān)推薦
雙極性步進(jìn)電機(jī)驅(qū)動電路
雙極性步進(jìn)電機(jī)的基本結(jié)構(gòu)
雙極性步進(jìn)電機(jī)的基本組件有哪些
雙極性步進(jìn)電機(jī)及其結(jié)構(gòu)和控制模式介紹

基于雙極性橋式電路的兩相制步進(jìn)電機(jī)驅(qū)動器設(shè)計
從步進(jìn)電機(jī)驅(qū)動IC的角度看步進(jìn)電機(jī)
以四線雙極性步進(jìn)電機(jī)為例,教你如何解決步進(jìn)電機(jī)只顫不轉(zhuǎn)問題
步進(jìn)電的單極性驅(qū)動與雙極性驅(qū)動技術(shù)差異
永磁雙極性步進(jìn)電機(jī)原理

步進(jìn)電機(jī)的相關(guān)知識:相、線、極性和步進(jìn)方式





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論