") 伺服驅(qū)動(dòng)器和伺服控制系統(tǒng)的區(qū)別
伺服驅(qū)動(dòng)器和伺服控制系統(tǒng)的區(qū)別
一、引言
在工業(yè)自動(dòng)化和精密控制領(lǐng)域,伺服驅(qū)動(dòng)器和伺服控制系統(tǒng)是兩個(gè)至關(guān)重要的組成部分。它們各自在系統(tǒng)中扮演著不同的角色,共同協(xié)作以實(shí)現(xiàn)高精度的控制效果。然而,許多人對(duì)這兩個(gè)概念的認(rèn)識(shí)較為模糊,容易混淆。本文旨在詳細(xì)闡述伺服驅(qū)動(dòng)器和伺服控制系統(tǒng)的區(qū)別,以便讀者能夠更清晰地理解它們的功能和應(yīng)用。
二、伺服驅(qū)動(dòng)器
(一)定義與功能
伺服驅(qū)動(dòng)器,又稱(chēng)為“伺服控制器”或“伺服放大器”,是專(zhuān)門(mén)用于控制伺服電機(jī)的一種控制器。其作用類(lèi)似于變頻器作用于普通交流馬達(dá),屬于伺服系統(tǒng)的一部分,主要應(yīng)用于高精度的定位系統(tǒng)。伺服驅(qū)動(dòng)器通過(guò)接收控制信號(hào)(如脈沖信號(hào)或模擬信號(hào)),將其轉(zhuǎn)換為驅(qū)動(dòng)伺服電機(jī)的電信號(hào),從而實(shí)現(xiàn)對(duì)伺服電機(jī)的精確控制。
(二)組成與工作原理
伺服驅(qū)動(dòng)器通常由電源、運(yùn)算器、功率輸出等三部分組成。其中,電源部分負(fù)責(zé)提供穩(wěn)定的電能;運(yùn)算器部分負(fù)責(zé)接收控制信號(hào)并進(jìn)行處理,生成驅(qū)動(dòng)伺服電機(jī)的電信號(hào);功率輸出部分則負(fù)責(zé)將電信號(hào)轉(zhuǎn)換為伺服電機(jī)所需的電流或電壓。
主流的伺服驅(qū)動(dòng)器均采用數(shù)字信號(hào)處理器(DSP)作為控制核心,可以實(shí)現(xiàn)比較復(fù)雜的控制算法,實(shí)現(xiàn)數(shù)字化、網(wǎng)絡(luò)化和智能化。功率器件普遍采用以智能功率模塊(IPM)為核心設(shè)計(jì)的驅(qū)動(dòng)電路,具有過(guò)電壓、過(guò)電流、過(guò)熱、欠壓等故障檢測(cè)保護(hù)電路,確保驅(qū)動(dòng)器的穩(wěn)定運(yùn)行。
(三)應(yīng)用與技術(shù)特點(diǎn)
伺服驅(qū)動(dòng)器被廣泛應(yīng)用于工業(yè)機(jī)器人、數(shù)控機(jī)床、自動(dòng)化設(shè)備等領(lǐng)域。其主要技術(shù)特點(diǎn)包括高精度控制、高動(dòng)態(tài)響應(yīng)、安全穩(wěn)定、靈活可調(diào)等。例如,通過(guò)位置、速度和力矩三種方式對(duì)伺服電機(jī)進(jìn)行控制,可以實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位。
三、伺服控制系統(tǒng)
(一)定義與功能
伺服控制系統(tǒng)是一個(gè)由多個(gè)部分組成的復(fù)雜系統(tǒng),包括運(yùn)動(dòng)控制器、伺服電機(jī)、驅(qū)動(dòng)器、傳感器等。其主要功能是根據(jù)輸入的指令信號(hào),通過(guò)傳感器實(shí)時(shí)測(cè)量并反饋被控對(duì)象的運(yùn)動(dòng)狀態(tài),經(jīng)過(guò)控制器處理后輸出控制信號(hào),驅(qū)動(dòng)伺服電機(jī)按照預(yù)定的軌跡、速度和加速度運(yùn)動(dòng),實(shí)現(xiàn)精確控制。
(二)組成與工作原理
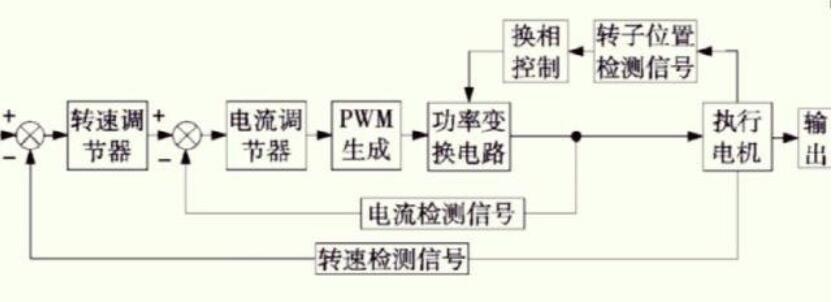
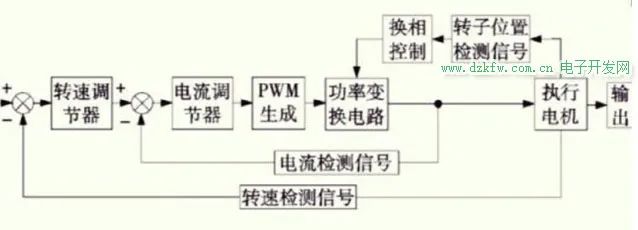
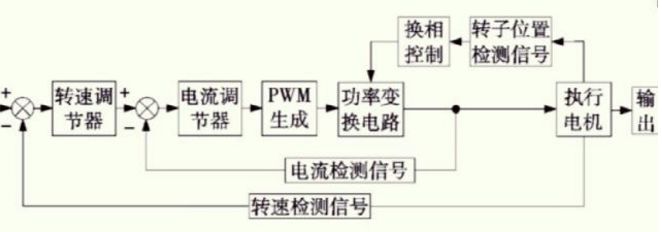
伺服控制系統(tǒng)一般由控制器、編碼器、傳感器、執(zhí)行機(jī)構(gòu)等部分組成。其中,控制器負(fù)責(zé)接收指令信號(hào)并進(jìn)行處理,生成控制信號(hào);編碼器負(fù)責(zé)測(cè)量伺服電機(jī)的位置和速度,并將測(cè)量值反饋給控制器;傳感器負(fù)責(zé)實(shí)時(shí)測(cè)量被控對(duì)象的運(yùn)動(dòng)狀態(tài);執(zhí)行機(jī)構(gòu)則負(fù)責(zé)將控制信號(hào)轉(zhuǎn)換為伺服電機(jī)的運(yùn)動(dòng)。
伺服控制系統(tǒng)的工作原理基于反饋控制原理,通過(guò)不斷比較指令信號(hào)和反饋信號(hào),計(jì)算出偏差信號(hào),并據(jù)此調(diào)整控制信號(hào),使被控對(duì)象的運(yùn)動(dòng)狀態(tài)逐漸接近指令信號(hào)所要求的狀態(tài)。
(三)應(yīng)用與技術(shù)特點(diǎn)
伺服控制系統(tǒng)廣泛應(yīng)用于航空航天、精密制造、機(jī)器人技術(shù)等領(lǐng)域。其主要技術(shù)特點(diǎn)包括高精度控制、高動(dòng)態(tài)響應(yīng)、高穩(wěn)定性、易于控制集成等。例如,在航空航天領(lǐng)域,伺服控制系統(tǒng)可以實(shí)現(xiàn)對(duì)飛行器姿態(tài)的高精度控制;在精密制造領(lǐng)域,伺服控制系統(tǒng)可以實(shí)現(xiàn)對(duì)加工過(guò)程的精確控制;在機(jī)器人技術(shù)領(lǐng)域,伺服控制系統(tǒng)可以實(shí)現(xiàn)對(duì)機(jī)器人運(yùn)動(dòng)的精確控制。
四、伺服驅(qū)動(dòng)器和伺服控制系統(tǒng)的區(qū)別
(一)功能定位不同
伺服驅(qū)動(dòng)器是伺服控制系統(tǒng)中的一個(gè)重要組成部分,主要負(fù)責(zé)將控制信號(hào)轉(zhuǎn)換為驅(qū)動(dòng)伺服電機(jī)的電信號(hào);而伺服控制系統(tǒng)則是一個(gè)完整的系統(tǒng),包括多個(gè)部分,負(fù)責(zé)實(shí)現(xiàn)精確控制的功能。
(二)技術(shù)特點(diǎn)不同
伺服驅(qū)動(dòng)器注重于對(duì)伺服電機(jī)的精確驅(qū)動(dòng)和控制;而伺服控制系統(tǒng)則更注重于整個(gè)系統(tǒng)的穩(wěn)定性和控制精度。
(三)應(yīng)用范圍不同
伺服驅(qū)動(dòng)器主要應(yīng)用于需要精確控制伺服電機(jī)的場(chǎng)合;而伺服控制系統(tǒng)則更廣泛地應(yīng)用于需要實(shí)現(xiàn)精確控制的各個(gè)領(lǐng)域。
五、結(jié)論
綜上所述,伺服驅(qū)動(dòng)器和伺服控制系統(tǒng)在工業(yè)自動(dòng)化和精密控制領(lǐng)域都扮演著重要的角色。它們各自具有不同的功能和技術(shù)特點(diǎn),共同協(xié)作以實(shí)現(xiàn)高精度的控制效果。在實(shí)際應(yīng)用中,需要根據(jù)具體的需求和場(chǎng)景選擇合適的設(shè)備和系統(tǒng)。
-
工業(yè)自動(dòng)化
+關(guān)注
關(guān)注
17文章
2691瀏覽量
68176 -
伺服驅(qū)動(dòng)器
+關(guān)注
關(guān)注
22文章
518瀏覽量
32445 -
伺服控制系統(tǒng)
+關(guān)注
關(guān)注
1文章
55瀏覽量
12448
發(fā)布評(píng)論請(qǐng)先 登錄
伺服驅(qū)動(dòng)器的工作原理_伺服驅(qū)動(dòng)器內(nèi)部結(jié)構(gòu)
伺服驅(qū)動(dòng)器的作用與變頻器區(qū)別
伺服電機(jī)和伺服驅(qū)動(dòng)器區(qū)別

伺服控制系統(tǒng)和伺服驅(qū)動(dòng)器的區(qū)別
伺服驅(qū)動(dòng)器的常見(jiàn)接線(xiàn)方法
伺服驅(qū)動(dòng)器工作原理圖





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論