") 伺服系統(tǒng)與步進(jìn)系統(tǒng)的區(qū)別
伺服系統(tǒng)與步進(jìn)系統(tǒng)的區(qū)別

一、引言
在工業(yè)自動(dòng)化和精密控制領(lǐng)域,伺服系統(tǒng)和步進(jìn)系統(tǒng)都是常見的控制系統(tǒng),它們各自具有獨(dú)特的工作原理和應(yīng)用場(chǎng)景。本文旨在深入探討伺服系統(tǒng)與步進(jìn)系統(tǒng)之間的區(qū)別,從多個(gè)維度進(jìn)行比較和分析,以便讀者能夠更清晰地理解兩者的差異。
二、伺服系統(tǒng)概述
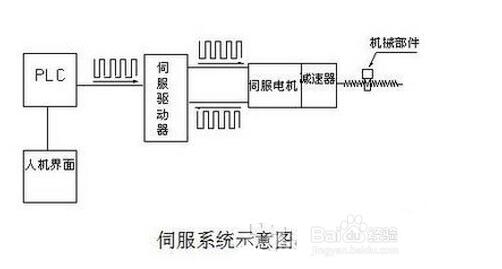
伺服系統(tǒng)(Servomechanism)又稱隨動(dòng)系統(tǒng),是一種能夠精確控制位置、速度和加速度的自動(dòng)控制系統(tǒng)。它由伺服電機(jī)、編碼器、控制器和反饋裝置等組成,通過實(shí)時(shí)監(jiān)測(cè)和調(diào)整系統(tǒng)的運(yùn)行狀態(tài),實(shí)現(xiàn)對(duì)目標(biāo)物體的精確控制。伺服系統(tǒng)具有高精度、快速響應(yīng)、穩(wěn)定性好和靈活性高等特點(diǎn),廣泛應(yīng)用于機(jī)器人技術(shù)、數(shù)控機(jī)床、印刷設(shè)備等領(lǐng)域。
三、步進(jìn)系統(tǒng)概述
步進(jìn)控制系統(tǒng)是一種常用的電子控制系統(tǒng),它通過控制電機(jī)的步進(jìn)角度來實(shí)現(xiàn)準(zhǔn)確的位置控制。步進(jìn)電機(jī)按照預(yù)定的步進(jìn)角度進(jìn)行轉(zhuǎn)動(dòng),可以實(shí)現(xiàn)高精度的定位和運(yùn)動(dòng)控制。步進(jìn)系統(tǒng)以其精準(zhǔn)的位置控制能力,在機(jī)械設(shè)備中的位置控制、電子設(shè)備中的定位控制等領(lǐng)域得到了廣泛的應(yīng)用。
四、伺服系統(tǒng)與步進(jìn)系統(tǒng)的區(qū)別
控制精度
伺服系統(tǒng)能夠?qū)崿F(xiàn)非常精確的位置控制,通常可以達(dá)到微米級(jí)別的精度。這主要得益于伺服電機(jī)的高精度控制和編碼器的精確反饋。而步進(jìn)電機(jī)的步距角一般較大,如兩相混合式步進(jìn)電機(jī)步距角一般為3.6°或1.8°,五相混合式步進(jìn)電機(jī)步距角一般為0.72°或0.36°。雖然步進(jìn)電機(jī)也可以通過細(xì)分驅(qū)動(dòng)器等手段提高精度,但與伺服系統(tǒng)相比仍有差距。
低頻特性
步進(jìn)電機(jī)在低速運(yùn)轉(zhuǎn)時(shí)容易出現(xiàn)低頻振動(dòng)現(xiàn)象,這是由于步進(jìn)電機(jī)的工作原理所決定的。為了克服低頻振動(dòng),通常需要采用阻尼技術(shù)或驅(qū)動(dòng)器上的細(xì)分技術(shù)等手段。而交流伺服電機(jī)運(yùn)轉(zhuǎn)非常平穩(wěn),即使在低速時(shí)也不會(huì)出現(xiàn)振動(dòng)現(xiàn)象。此外,交流伺服系統(tǒng)具有共振抑制功能,可涵蓋機(jī)械的剛性不足,并且系統(tǒng)內(nèi)部具有頻率解析機(jī)能(FFT),可檢測(cè)出機(jī)械的共振點(diǎn),便于系統(tǒng)調(diào)整。
矩頻特性
步進(jìn)電機(jī)的輸出力矩隨轉(zhuǎn)速升高而下降,且在較高轉(zhuǎn)速時(shí)會(huì)急劇下降,所以其最高工作轉(zhuǎn)速一般在300~600RPM。而交流伺服電機(jī)為恒力矩輸出,即在其額定轉(zhuǎn)速(一般為2000RPM或3000RPM)以內(nèi),都能輸出額定轉(zhuǎn)矩,在額定轉(zhuǎn)速以上為恒功率輸出。這使得伺服系統(tǒng)在高速運(yùn)動(dòng)時(shí)仍能保持穩(wěn)定的控制性能。
過載能力
步進(jìn)電機(jī)一般不具有過載能力,在選型時(shí)為了克服啟動(dòng)瞬間的慣性力矩,往往需要選取較大轉(zhuǎn)矩的電機(jī),而機(jī)器在正常工作期間又不需要那么大的轉(zhuǎn)矩,便出現(xiàn)了力矩浪費(fèi)的現(xiàn)象。而交流伺服電機(jī)具有較強(qiáng)的過載能力,以松下交流伺服系統(tǒng)為例,其最大轉(zhuǎn)矩為額定轉(zhuǎn)矩的三倍,可用于克服慣性負(fù)載在啟動(dòng)瞬間的慣性力矩。
運(yùn)行性能
步進(jìn)電機(jī)的控制為開環(huán)控制,啟動(dòng)頻率過高或負(fù)載過大易出現(xiàn)丟步或堵轉(zhuǎn)的現(xiàn)象,停止時(shí)轉(zhuǎn)速過高易出現(xiàn)過沖的現(xiàn)象。因此,為保證其控制精度,應(yīng)處理好升、降速問題。而伺服系統(tǒng)為閉環(huán)控制,通過編碼器等反饋裝置實(shí)時(shí)監(jiān)測(cè)系統(tǒng)的運(yùn)行狀態(tài),并進(jìn)行調(diào)整和優(yōu)化,從而確保系統(tǒng)的穩(wěn)定性和控制精度。
應(yīng)用場(chǎng)景
伺服系統(tǒng)由于其高精度、快速響應(yīng)和穩(wěn)定性好的特點(diǎn),廣泛應(yīng)用于需要高精度定位和運(yùn)動(dòng)控制的場(chǎng)合,如機(jī)器人技術(shù)、數(shù)控機(jī)床、印刷設(shè)備等。而步進(jìn)系統(tǒng)則以其精準(zhǔn)的位置控制能力和較低的成本,在機(jī)械設(shè)備中的位置控制、電子設(shè)備中的定位控制等領(lǐng)域得到了廣泛的應(yīng)用。
五、結(jié)論
綜上所述,伺服系統(tǒng)與步進(jìn)系統(tǒng)雖然在控制方式上相似(脈沖串和方向信號(hào)),但在使用性能和應(yīng)用場(chǎng)合上存在著較大的差異。伺服系統(tǒng)以其高精度、快速響應(yīng)和穩(wěn)定性好的特點(diǎn),在需要高精度定位和運(yùn)動(dòng)控制的場(chǎng)合具有明顯優(yōu)勢(shì);而步進(jìn)系統(tǒng)則以其精準(zhǔn)的位置控制能力和較低的成本在特定場(chǎng)合得到了廣泛應(yīng)用。在實(shí)際應(yīng)用中,應(yīng)根據(jù)具體需求和場(chǎng)景選擇合適的控制系統(tǒng)。
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6774瀏覽量
111991 -
伺服系統(tǒng)
+關(guān)注
關(guān)注
14文章
586瀏覽量
40127 -
工業(yè)自動(dòng)化
+關(guān)注
關(guān)注
17文章
2710瀏覽量
68256
發(fā)布評(píng)論請(qǐng)先 登錄
基于單片機(jī)的步進(jìn)電機(jī)伺服系統(tǒng)設(shè)計(jì)
進(jìn)給伺服系統(tǒng)
伺服系統(tǒng)介紹

步進(jìn)電機(jī)開環(huán)伺服系統(tǒng)解析,開環(huán)步進(jìn)伺服系統(tǒng)的工作原理
什么是伺服系統(tǒng),步進(jìn)電機(jī)和伺服電機(jī)的區(qū)別
伺服系統(tǒng)是什么_伺服系統(tǒng)的基本要求_伺服系統(tǒng)的基本組成
伺服系統(tǒng)什么意思_伺服系統(tǒng)的作用是什么
伺服系統(tǒng)應(yīng)用于哪兒_伺服系統(tǒng)應(yīng)用實(shí)例
中國(guó)伺服系統(tǒng)產(chǎn)業(yè)發(fā)展預(yù)測(cè)
交流伺服系統(tǒng)的分類及應(yīng)用場(chǎng)合
步進(jìn)電機(jī)開環(huán)伺服系統(tǒng)解析
伺服系統(tǒng)原理及分類

交流伺服系統(tǒng)的分類及應(yīng)用場(chǎng)合





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論