") EasyGo實(shí)時(shí)仿真丨飛輪儲(chǔ)能系統(tǒng)硬件在環(huán)仿真測試
EasyGo實(shí)時(shí)仿真丨飛輪儲(chǔ)能系統(tǒng)硬件在環(huán)仿真測試
飛輪儲(chǔ)能系統(tǒng)由三相PWM整流器、飛輪驅(qū)動(dòng)系統(tǒng)和H橋變換電路三個(gè)單元組合而成。本篇中我們對(duì)飛輪儲(chǔ)能系統(tǒng)進(jìn)行拆分,分別將控制算法與被控電路拓?fù)洳渴鸬交赑PEC平臺(tái)的真實(shí)控制板與EasyGo PXIBox實(shí)時(shí)仿真器,來進(jìn)行飛輪儲(chǔ)能系統(tǒng)硬件在環(huán)仿真測試。
 測試系統(tǒng)整體示意圖
測試系統(tǒng)整體示意圖測試中,使用PPEC平臺(tái)進(jìn)行每個(gè)單元的控制,使用PXIBox實(shí)時(shí)仿真器及6500FPGA板卡,來進(jìn)行1us的小步長電力電子拓?fù)浞抡妗⒂布诃h(huán)測試仿真結(jié)果與離線仿真結(jié)果對(duì)比發(fā)現(xiàn),其控制效果、仿真數(shù)據(jù)與預(yù)期一致。
歡迎感興趣的工程師們咨詢了解,接下來為大家分享本次飛輪儲(chǔ)能系統(tǒng)硬件在環(huán)仿真測試詳情。
一、測試說明
1、測試對(duì)象
本片中測試對(duì)象為:飛輪儲(chǔ)能系統(tǒng)。該系統(tǒng)由三個(gè)單元組合而成,且每個(gè)單元的控制部分都由PPEC平臺(tái)進(jìn)行控制,同時(shí)使用EasyGo PXIBox進(jìn)行仿真拓?fù)洌纬砷]環(huán)。
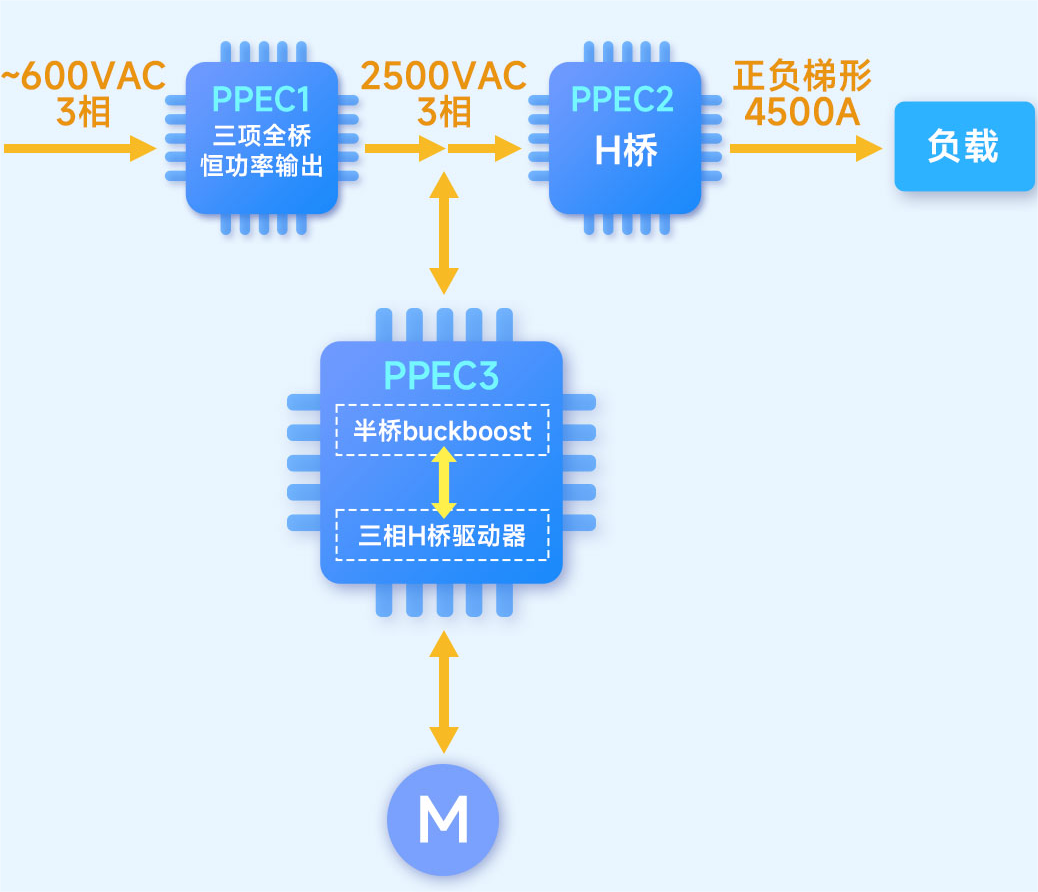 飛輪儲(chǔ)能系統(tǒng)
飛輪儲(chǔ)能系統(tǒng)單元1:三相PWM整流器。采用恒功率控制策略。
單元2:飛輪驅(qū)動(dòng)系統(tǒng)。內(nèi)部含2個(gè)變換器,一個(gè)是半橋buck-boost用于DCDC變換,另一個(gè)是三相H橋驅(qū)動(dòng)電機(jī)工作。當(dāng)母線電壓高,系統(tǒng)將能量往飛輪中存儲(chǔ),當(dāng)母線電壓低,系統(tǒng)將飛輪能量轉(zhuǎn)變?yōu)殡娔転槟妇€提供能量。
單元3:H橋變換電路。實(shí)現(xiàn)電流梯形輸出控制。
2、測試系統(tǒng)架構(gòu)
對(duì)飛輪儲(chǔ)能系統(tǒng)進(jìn)行拆分,分別將控制算法與被控電路拓?fù)洳渴鸬交赑PEC平臺(tái)的真實(shí)控制板與EasyGo PXIBox實(shí)時(shí)仿真器。
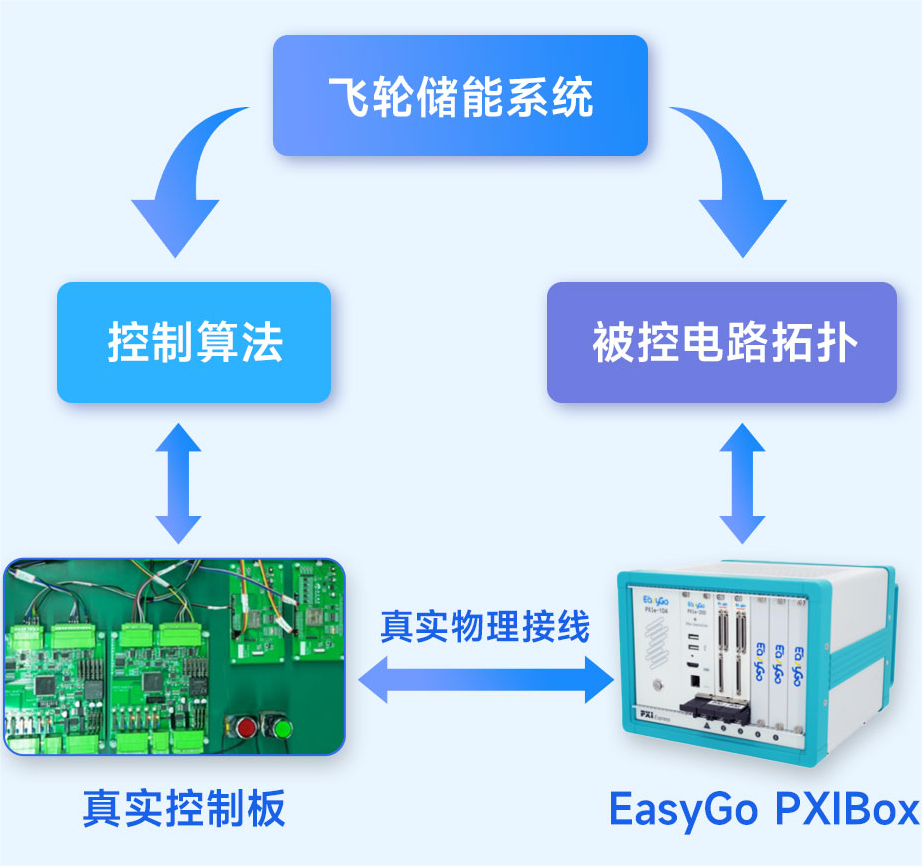 系統(tǒng)分割示意圖
系統(tǒng)分割示意圖在測試中,將電路拓?fù)洳糠钟脤?shí)時(shí)仿真設(shè)備PXIBox進(jìn)行模擬,將控制部分用PPEC平臺(tái)實(shí)現(xiàn),并將兩者通過物理接線的形式進(jìn)行連接,構(gòu)成一個(gè)閉環(huán)系統(tǒng)。
測試系統(tǒng)整體示意圖3、測試系統(tǒng)物理接線
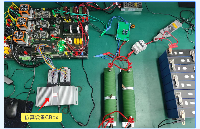
真實(shí)物理接線如下圖所示。
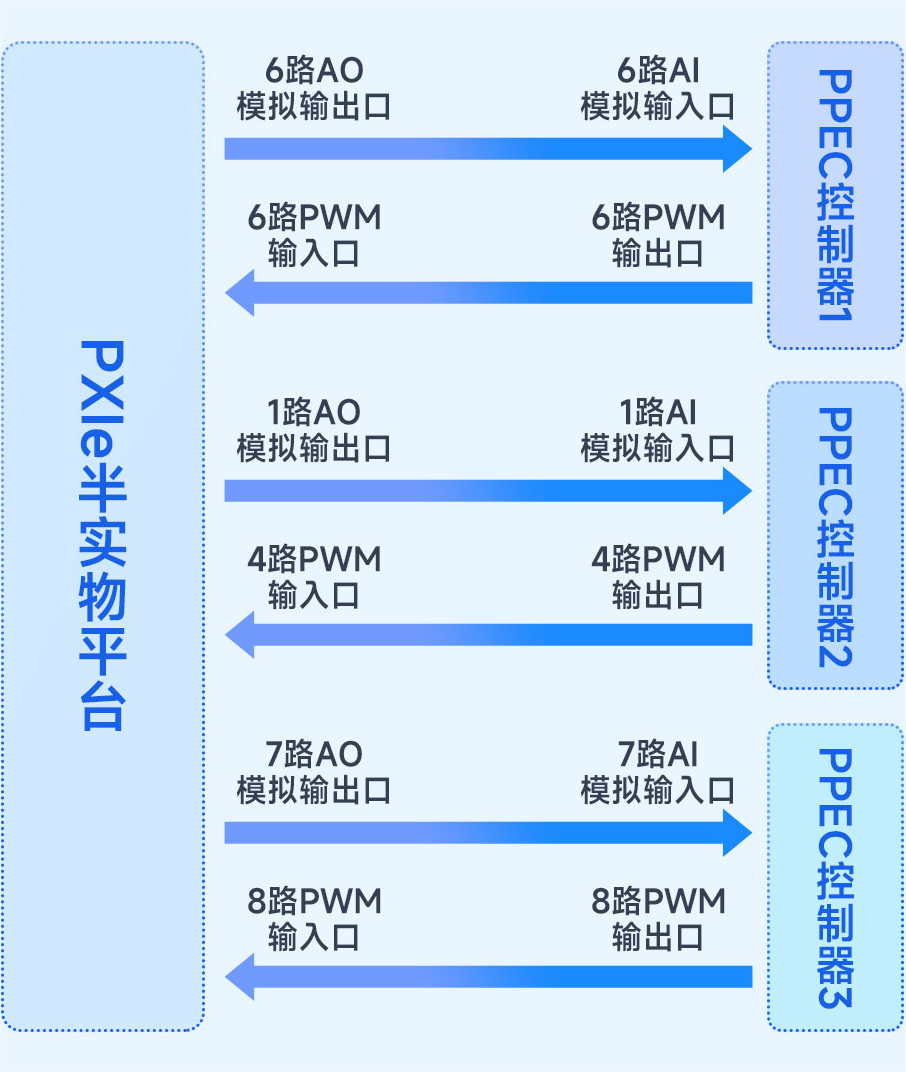 接線示意圖
接線示意圖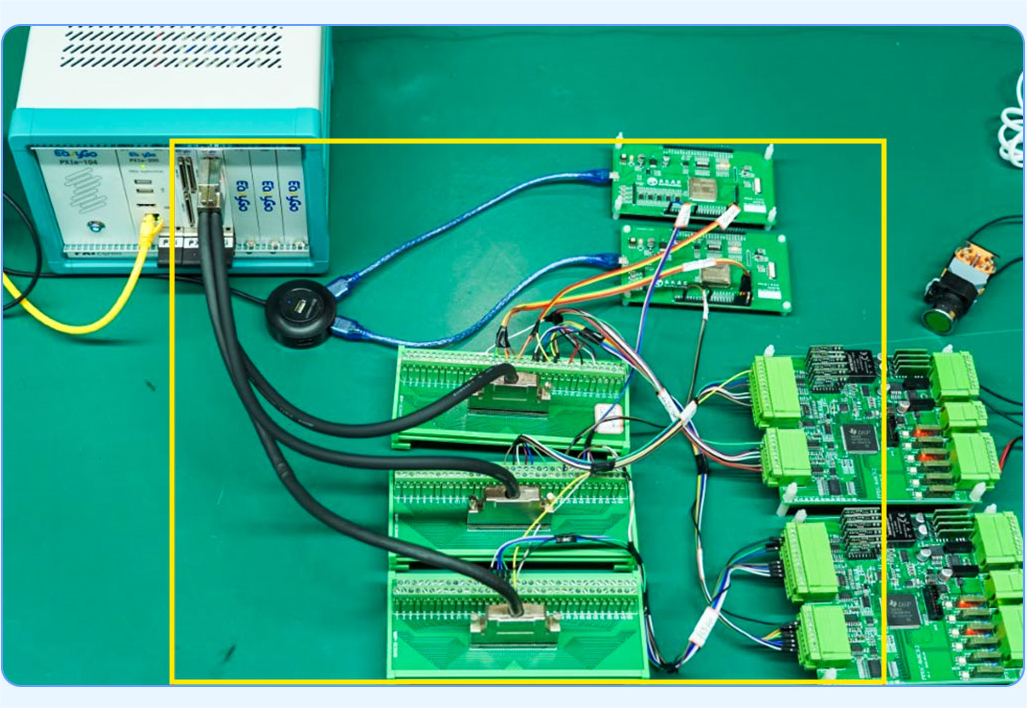 真實(shí)物理接線圖
真實(shí)物理接線圖二、測試過程與分析
1、搭建模型
利用Matlab Simulink搭建出飛輪儲(chǔ)能系統(tǒng)模型。
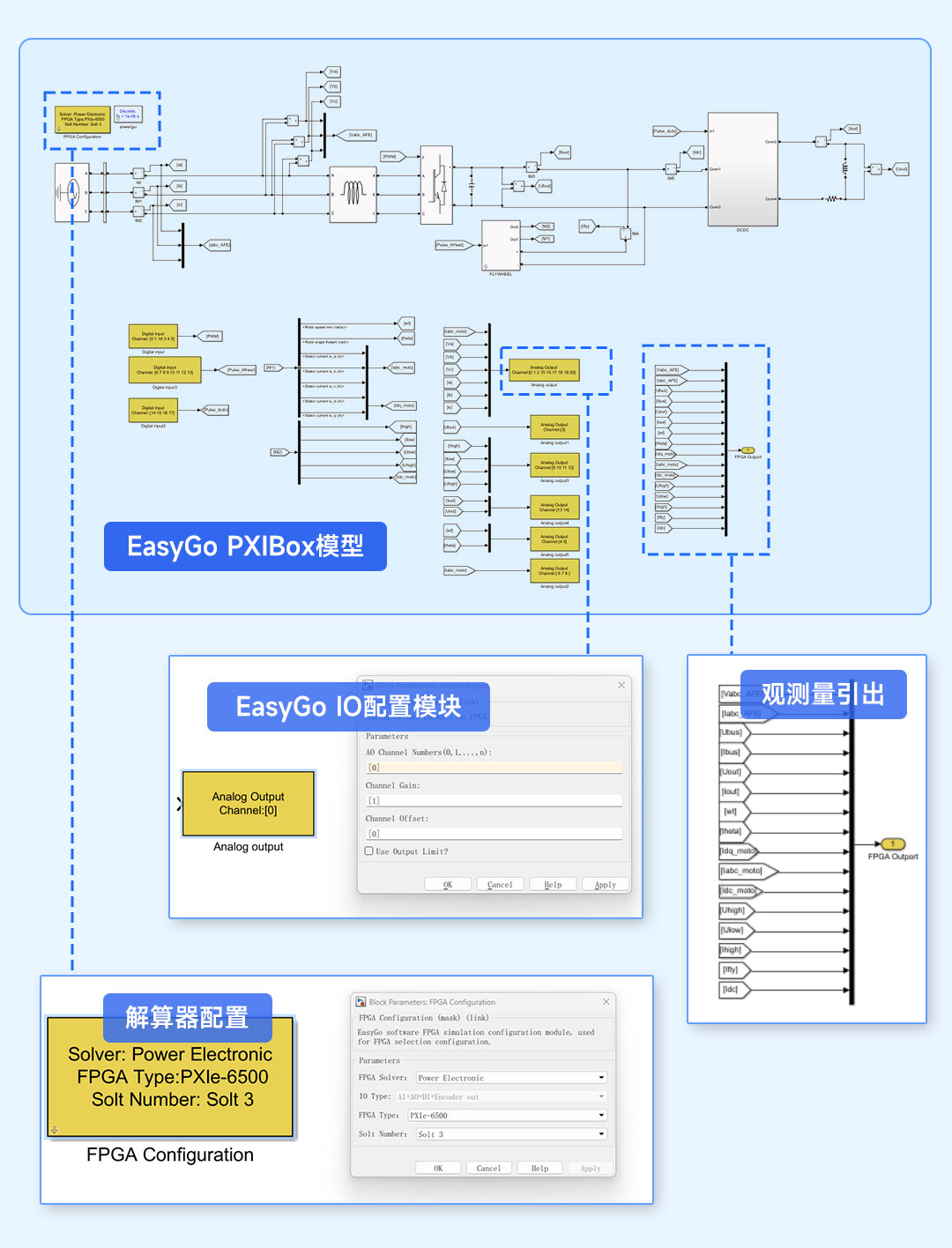 EasyGo PXIBox模型
EasyGo PXIBox模型IO配置。用EasyGo嵌入Matlab中的IO配置模塊對(duì)IO進(jìn)行配置。同時(shí)還可以將需要觀測的量引出來,用上位機(jī)進(jìn)行實(shí)時(shí)觀測。
解算器模塊配置。解算器模塊是用來確認(rèn)該模型應(yīng)該部署進(jìn)哪一部分硬件,或者用哪一種解算模式的。在本次測試中,用到的硬件是PXIBox的6500板卡該板塊在機(jī)箱的第三板槽中,運(yùn)行的模型時(shí)電力電子拓?fù)洹?/p>
2、部署模型
在實(shí)時(shí)模型搭建好之后,需要用EasyGo Desksim軟件進(jìn)行模型部署。
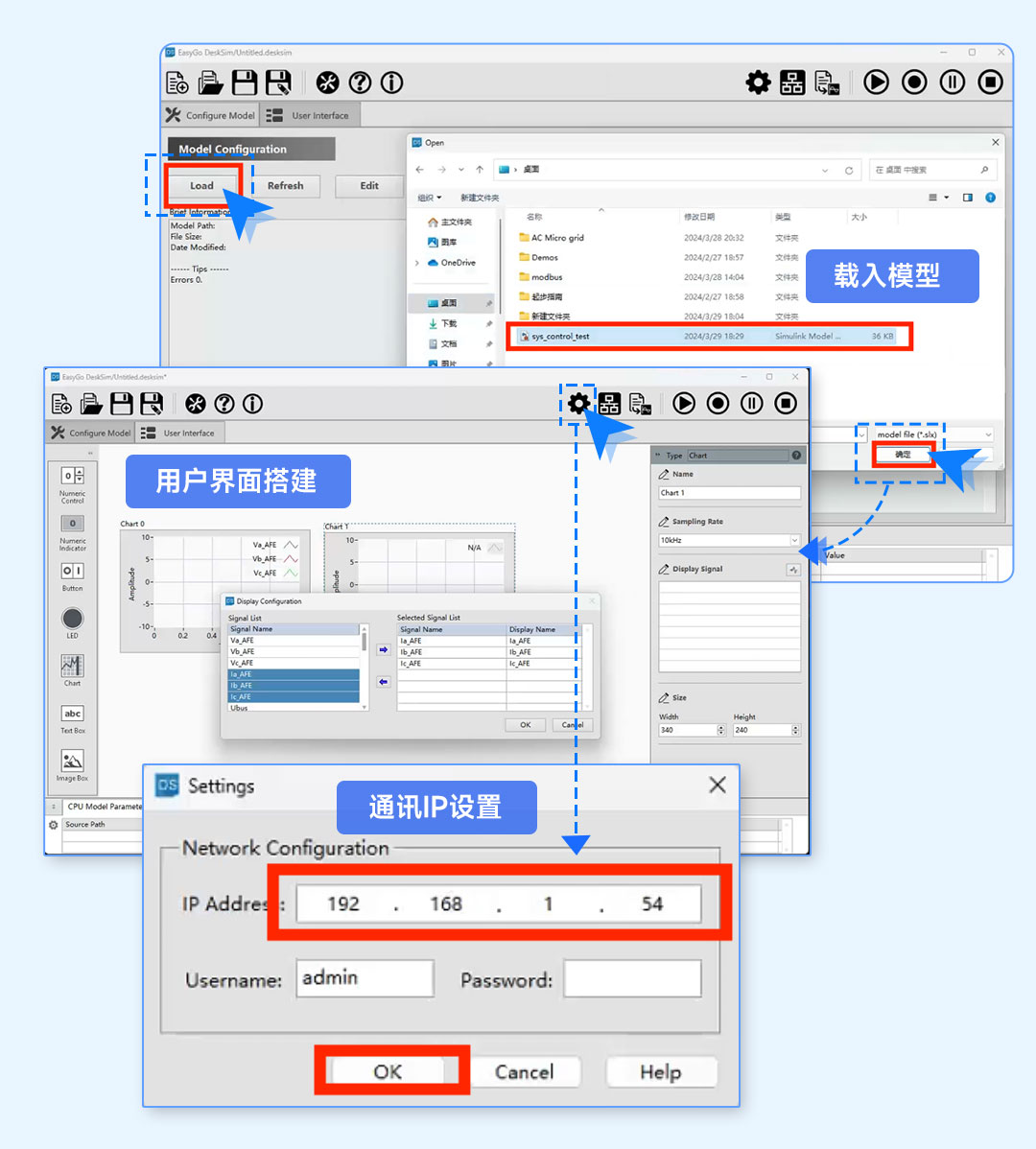
- 點(diǎn)擊“l(fā)oad”部署模型,選擇對(duì)應(yīng)文件路徑。
- 在User Interface中進(jìn)行搭建用戶觀測界面
- 設(shè)置通訊IP,EasyGo PXIBox的IP地址為192.168.154
3、運(yùn)行模型
點(diǎn)擊運(yùn)行按鈕等待模型運(yùn)行,并通過PPEC平臺(tái)控制該模型。
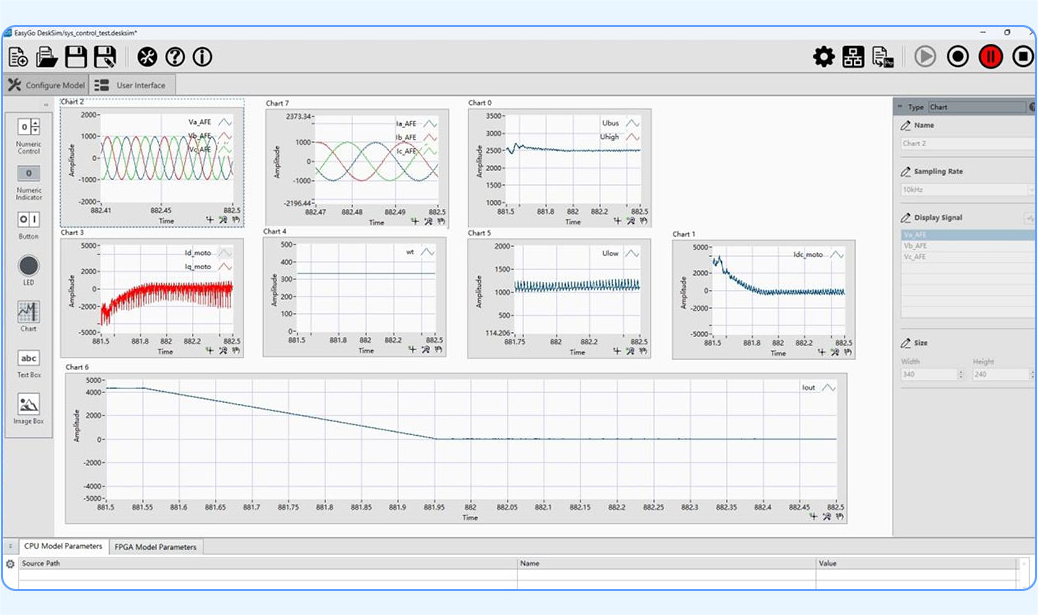
測試一:H橋輸出為0時(shí)仿真波形
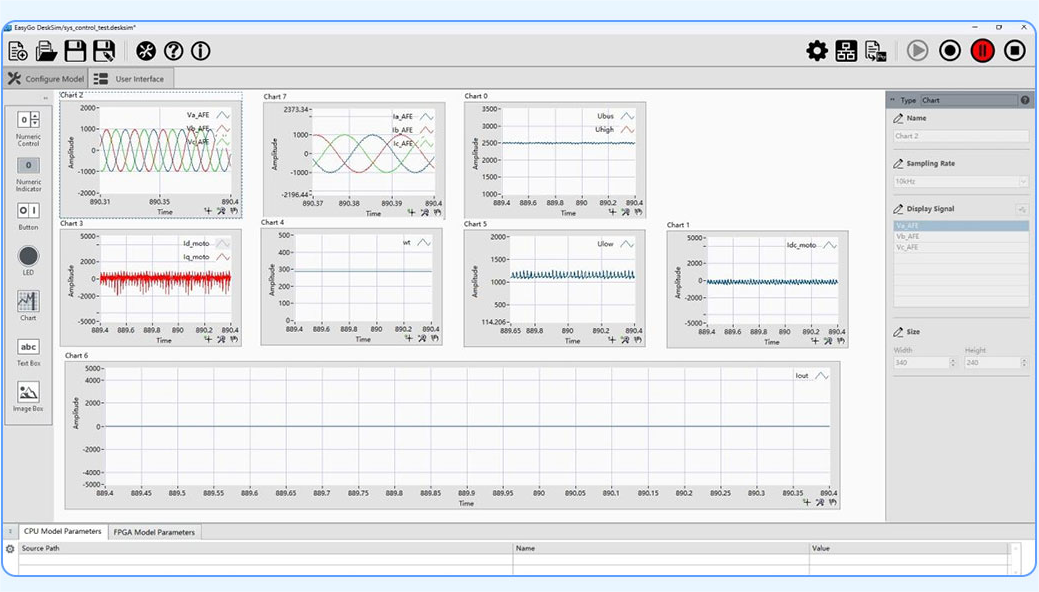 H橋輸出為0時(shí)波形圖
H橋輸出為0時(shí)波形圖測試二:H橋輸出為4500A上升沿波形
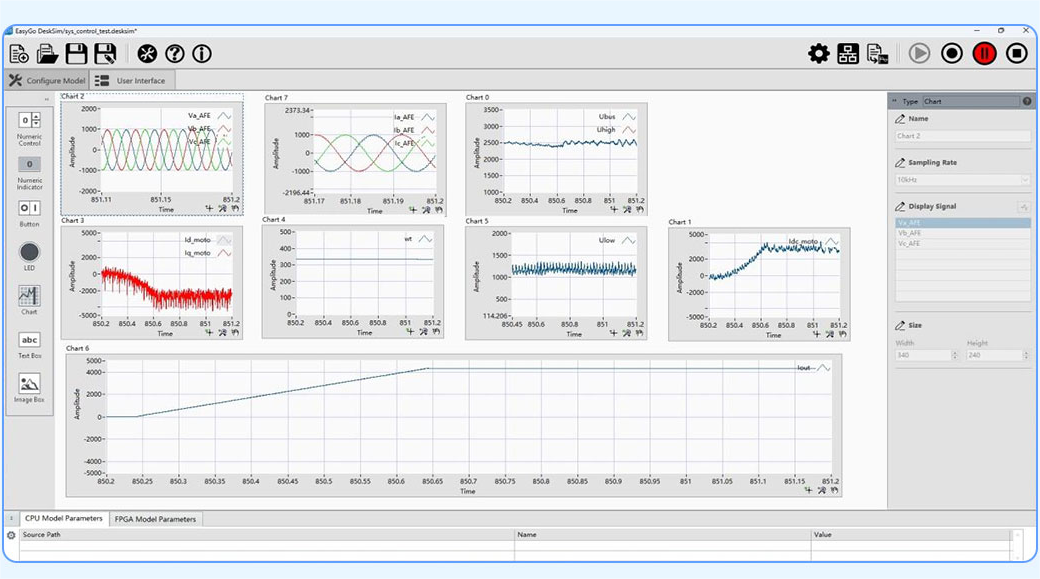 H橋輸出為上升沿時(shí)波形圖
H橋輸出為上升沿時(shí)波形圖測試三:H橋輸出為4500A下降沿波形
 H橋輸出為下降沿時(shí)波形圖
H橋輸出為下降沿時(shí)波形圖如圖上圖波形所示,Va、Vb、Vc為三相整流器交流側(cè)電壓波形;ia、ib、ic為三相整流器交流側(cè)電流波形;Uhigh和Udc_bus為三相整流器直流側(cè)母線電壓波形;ibus三相整流器直流側(cè)母線電流波形;i_lod為H橋輸出電流波形;
測試結(jié)果:
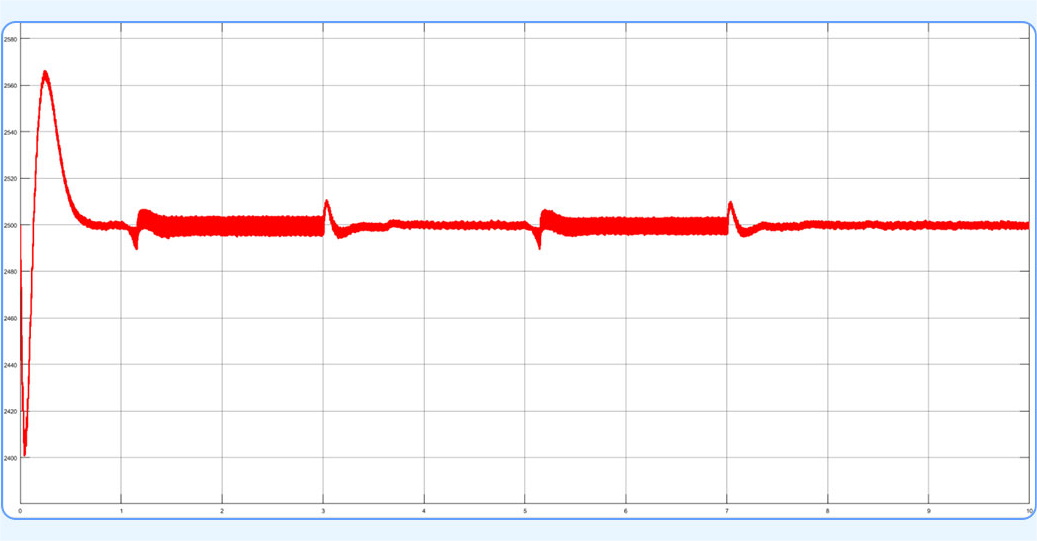 離線模型中Udc_bus波形圖
離線模型中Udc_bus波形圖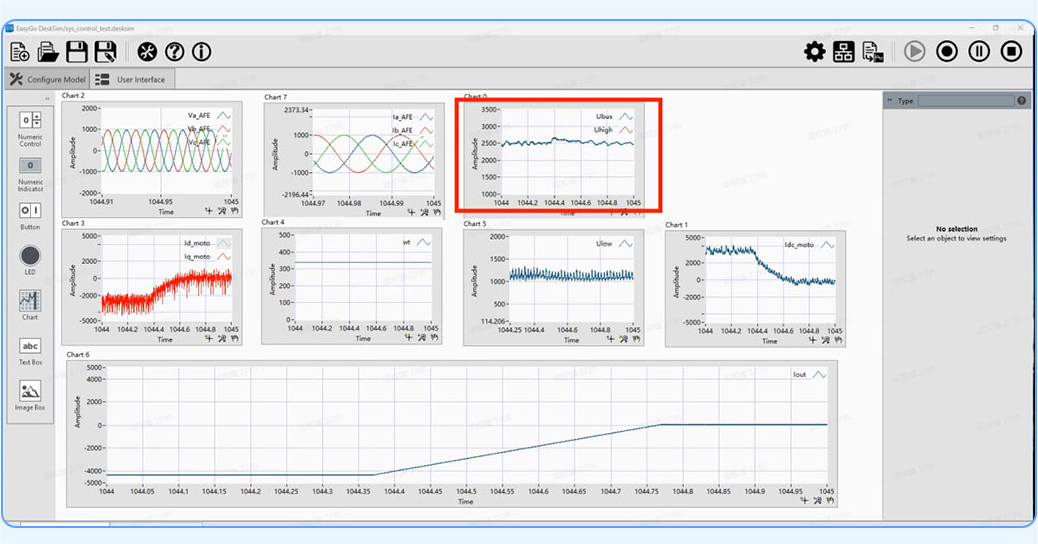 實(shí)時(shí)仿真中Udc_bus波形圖
實(shí)時(shí)仿真中Udc_bus波形圖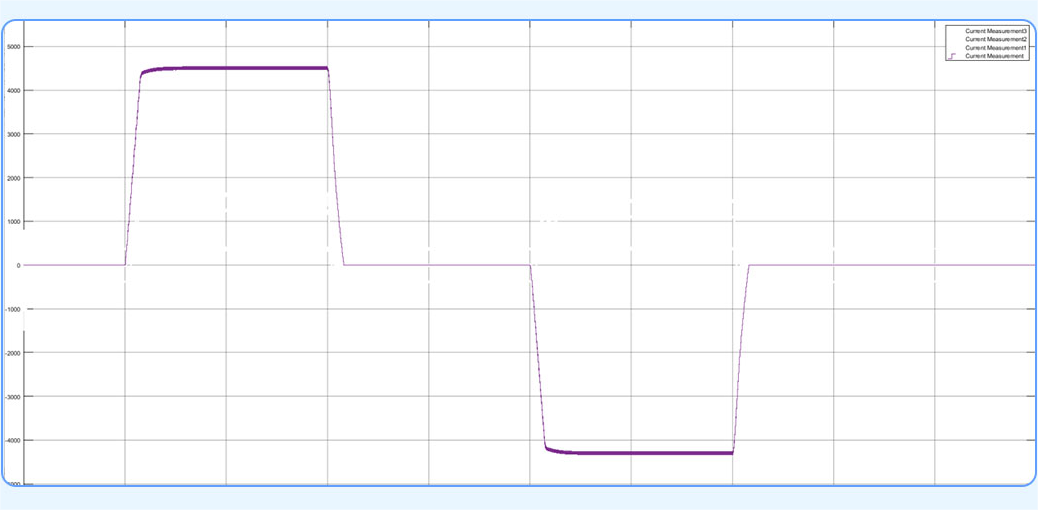 離線模型中Iout波形圖
離線模型中Iout波形圖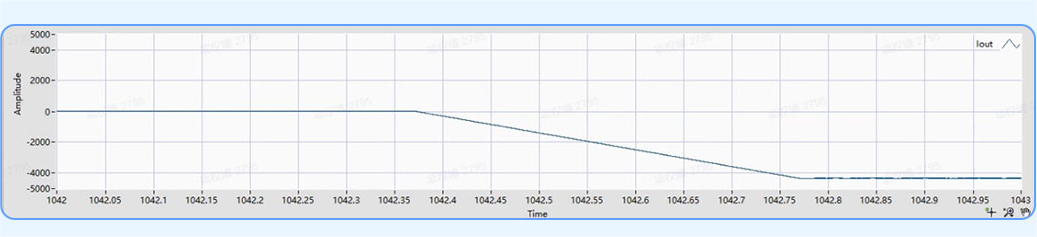 實(shí)時(shí)仿真中Iout下降沿波形圖
實(shí)時(shí)仿真中Iout下降沿波形圖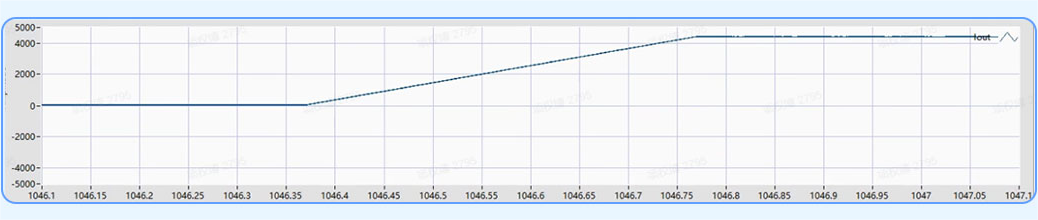 實(shí)時(shí)仿真中Iout上升沿波形圖
實(shí)時(shí)仿真中Iout上升沿波形圖將硬件在環(huán)測試仿真結(jié)果與離線仿真結(jié)果對(duì)比發(fā)現(xiàn),其控制效果、仿真數(shù)據(jù)與預(yù)期一致。
今天的分享就到這兒啦,歡迎感興趣的工程師們一起留言溝通。
-
仿真器
+關(guān)注
關(guān)注
14文章
1034瀏覽量
85097 -
飛輪儲(chǔ)能
+關(guān)注
關(guān)注
0文章
29瀏覽量
9782 -
仿真測試
+關(guān)注
關(guān)注
0文章
98瀏覽量
11557 -
儲(chǔ)能系統(tǒng)
+關(guān)注
關(guān)注
4文章
990瀏覽量
25600 -
實(shí)時(shí)仿真平臺(tái)
+關(guān)注
關(guān)注
0文章
8瀏覽量
1466
發(fā)布評(píng)論請(qǐng)先 登錄
【分享】基于Easygo仿真平臺(tái)的三電機(jī)實(shí)時(shí)仿真測試應(yīng)用
EasyGo使用筆記丨分布式光伏集群并網(wǎng)控制硬件在環(huán)仿真應(yīng)用
EasyGo實(shí)時(shí)仿真丨PCS儲(chǔ)能變流器控制仿真應(yīng)用
解決方案丨EasyGo新能源系統(tǒng)實(shí)時(shí)仿真應(yīng)用
EasyGo 實(shí)時(shí)仿真丨儲(chǔ)能系統(tǒng)有功無功解耦控制應(yīng)用
EasyGo 實(shí)時(shí)仿真丨DC-AC-MMC 實(shí)時(shí)仿真應(yīng)用
EasyGo使用筆記丨安全高效,新能源系統(tǒng)電網(wǎng)適應(yīng)性測試應(yīng)用
EasyGo實(shí)時(shí)仿真丨控制器硬件在環(huán)(HIL)風(fēng)電場景仿真測試應(yīng)用
Easygo 實(shí)時(shí)仿真丨微網(wǎng)孤島運(yùn)行下儲(chǔ)能控制策略仿真應(yīng)用
EasyGo 實(shí)時(shí)仿真丨大功率電機(jī)控制器硬件在環(huán)系統(tǒng)仿真測試
Easygo實(shí)時(shí)仿真:FPGA實(shí)時(shí)仿真器、硬件在環(huán)((HIL)測試設(shè)備及快速控制原型(RCP)系統(tǒng)開發(fā)
EasyGo實(shí)時(shí)仿真丨EasyGo儲(chǔ)能逆變器在環(huán)測試解決方案
Easygo實(shí)時(shí)仿真丨微網(wǎng)仿真測試系統(tǒng)應(yīng)用
EasyGo實(shí)時(shí)仿真丨PCS儲(chǔ)能變流器控制仿真應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論