 電機庫使用入門(一)
電機庫使用入門(一)
HPM_MCL是先楫半導體開發的支持基于傳感器的電機控制應用和無傳感器的電機控制應用的電機控制庫。對于如何使用先楫電機庫,各位可能會有一些疑問,所以開此專欄,介紹先楫電機庫的使用方法。
開 篇
整個專題我們主要以使用為主,過程中穿插講述一下基本的概念,方便新入門的同學閱讀,對基礎知識比較了解的同學可以跳過這一部分。我們會按照有感foc,無感foc,硬件電流環這樣的順序來進行。過程中大家對哪個部分有興趣可以留言,我們可以詳細展開聊聊。文章中如有疏漏部分,歡迎大家及時指正。
先楫電機庫支持特性
FOC
6-step
電流環路
速度環路
位置環路
硬件電流環路
DQ軸解耦
死區補償
角度補償
無傳感器滑模
無傳感器過零
無傳感器高頻注入
步進電機矢量控制
FOC(Field Oriented Control,場定向控制)
FOC技術的優點:
FOC能夠優化電機的運行,降低能耗,提高效率。
通過精確控制電流,可以實現平滑且快速的扭矩響應。
低噪音和振動。
主要由如下幾個部分組成:
1.坐標變換
三相電流abc到dq變換:電機的三相定子電流(a、b、c)在靜止坐標系下,通過Clark變換(從三相靜止坐標系到兩相靜止坐標系αβ)和Park變換(從兩相靜止坐標系到兩相旋轉坐標系dq),被轉換為兩相旋轉坐標系下的電流分量(d、q)。其中d軸電流對應于勵磁電流,q軸電流對應于轉矩電流。
2.dq坐標系的目的
在dq坐標系中,通過獨立控制d軸和q軸電流,可以實現對電機磁通和轉矩的獨立調節。通常,d軸電流被設定為零或維持在一個恒定值,以減少銅損,而q軸電流則根據所需的轉矩進行調整。
3.位置
為了準確地控制電機,需要知道轉子的位置。可以通過編碼器、霍爾效應傳感器或其他傳感器提供,或者在無傳感器FOC中,通過估算算法來實現。
4.SVPWM
SVPWM是功率開關元件組成的特定開關模式產生的脈寬調制波,能夠使輸出電流波形盡可能接近于理想的正弦波形。他的電壓波形是馬鞍波的形式。
根據FOC算法計算出的參考電壓矢量,并判斷所在扇區。
計算矢量作用時間。
計算橋臂導通時間。
先楫電機庫的FOC部分整體框架
如下圖simulink模型所示:
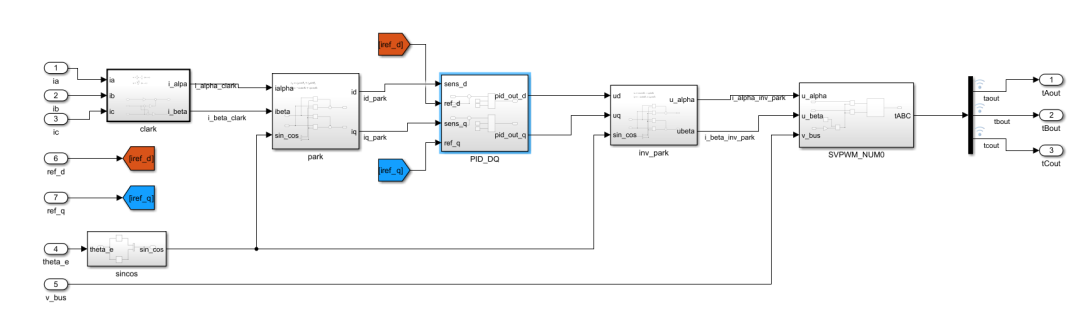
使用的公式如下:
? Clark變換

? Park變換

? invPark變換

我們在這一章節中只是拋出最終結果來使用,SVPWM部分后邊會有專門的章節展開來講。
使用官方提供的DEMO
作為先楫電機庫使用入門的第一個章節,我們主要介紹如何快速使用官方提供的demo驅動一個永磁同步電機。這一節主要進行有感控制,使用bldc_foc例程來進行說明。該例程支持了上文提到的如下特性:
FOC
電流環路
速度環路
位置環路
硬件電流環路
死區補償
角度補償
DQ軸解耦
準 備
要運行一個電機demo需要準備一些外圍設備,下面會列出具體的設備和要求,方便用戶自行購買相關設備。同時建議本次入門內容最好使用官方推薦的設備。
開發板
大部分的先楫開發板都支持電機接口,下面列出具體型號
HPM6750evk
HPM6750evk2
HPM6750evkmini
(注意:此開發板應當搭配一個轉接板才能使用,型號為HPM6750EVKMINI-TO-Motor Rev.A)
HPM6300evk
HPM6200evk
HPM5300evk
HPM6e00evk
電機驅動板
先楫半導體提供了電機驅動板型號為 DRV-LV50A_MP1907,用戶也可以根據引腳定義設計自己的驅動板,只要符合如下的引腳定義即可。
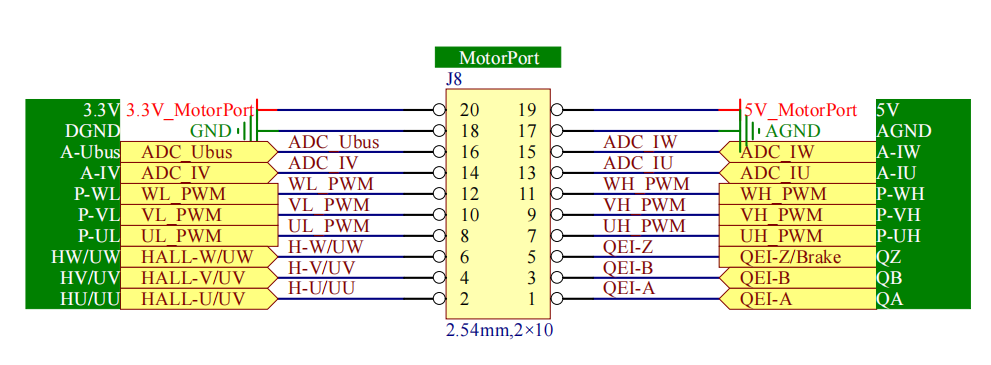
如果使用官方提供的驅動板,需要關心如下幾個插針的連接情況:
J10 需要使用跳冒連接
J6、J7、J12用來選擇給到電機接口2、4、6引腳的信號是電壓值還是hall傳感器的值,我們進行有傳感器操作時,需要把J6、J7、J12連接到HU、HV、HW。我們本次使用的demo不使用hall傳感器,所以無論如何連接均可。
電 機
先楫半導體使用的電機型號為雷賽智能 BLM57070-1000,其他型號電機需要滿足如下特性,如果不滿足這些特性可能需要修改代碼,但是如果電機缺少一些特性則可能導致某些依賴這些特性的demo無法使用。
永磁同步電機
極對數為2
輸入電壓24V
帶有ABZ編碼器,差分信號輸出,1000線
帶有HALL傳感器,60度角度差
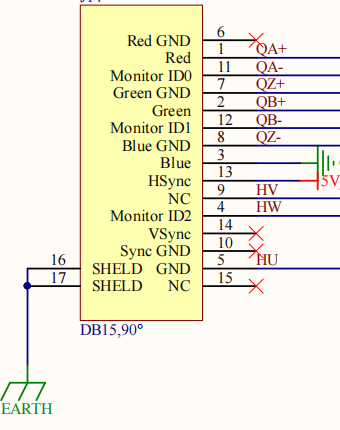
電機和電機驅動板之間使用DP-15接口,不是此接口的電機需要飛線連接,接口定義如下:
電 源
一個24V的穩壓電源,提供的電流根據電機決定,先楫官方使用的電機需要可以提供3A電流的電源。
操 作
以官方使用的開發板、驅動板和電機進行說明。
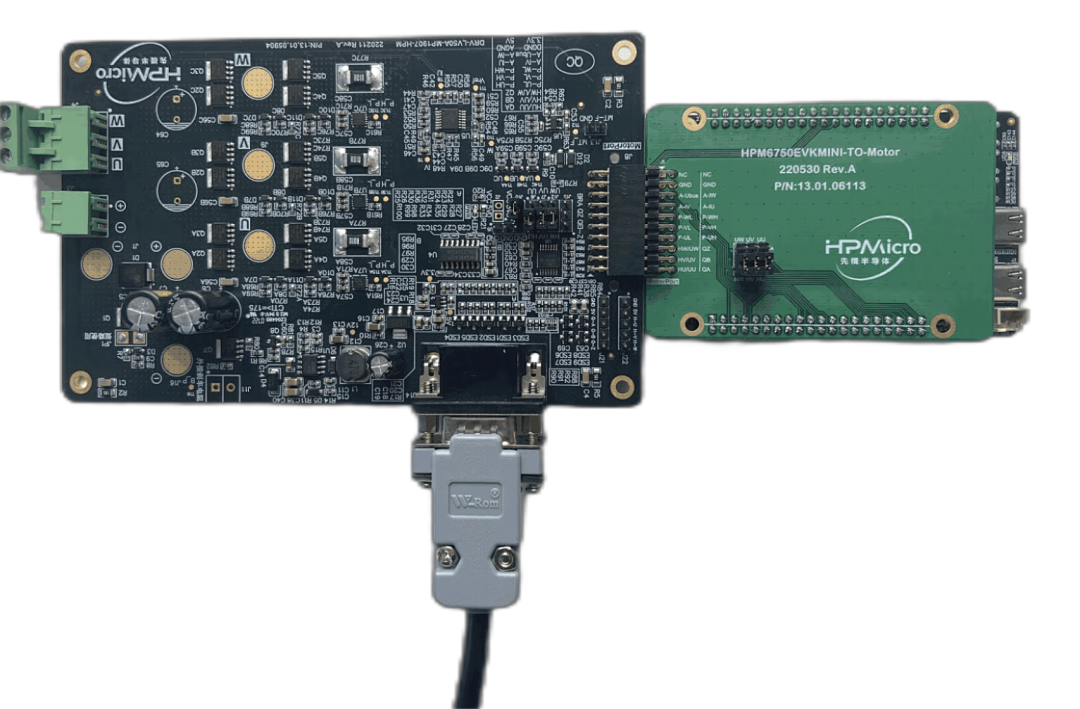
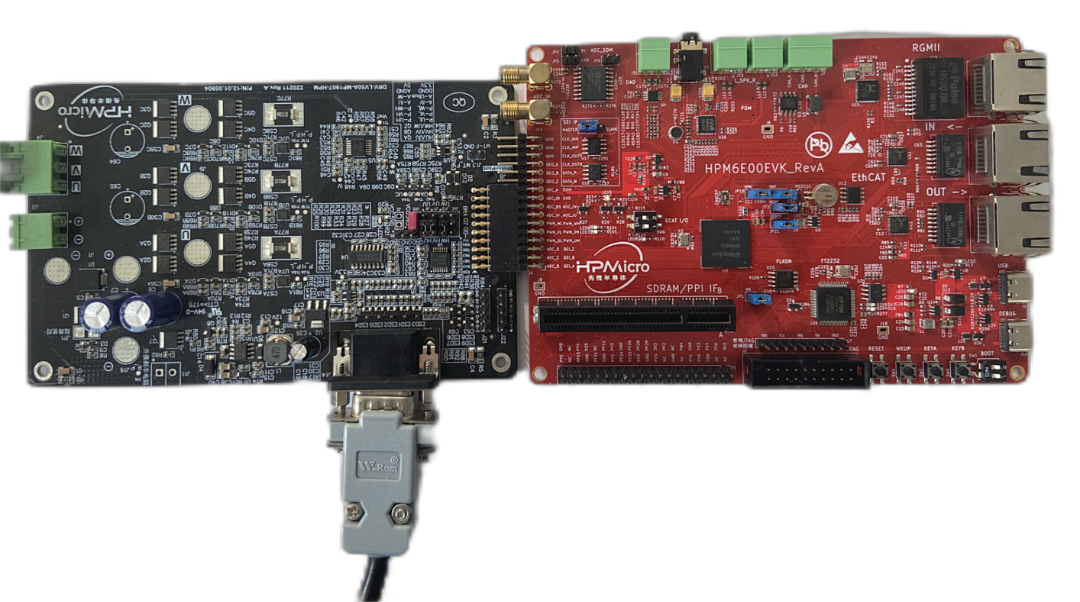
連接開發板到電機驅動板,連接電機到電機驅動板,連接電源到電機驅動板,不要給24V上電。下圖是6750evkmini連接后的樣子:
注意一些特殊的開發板,在開發板和電機demo的readme也會描述這種情況:
- hpm6750evk需要通過撥碼開關選擇pwm為輸出模式。
- 如果開發板的參考電壓是通過跳冒選擇的,需要確認有一個參考電壓被選擇。
對于和6E00EVK這種類似的引腳較多的開發板,應該確認好絲印和電機驅動板一致后插入:
按下圖所示編譯foc程序
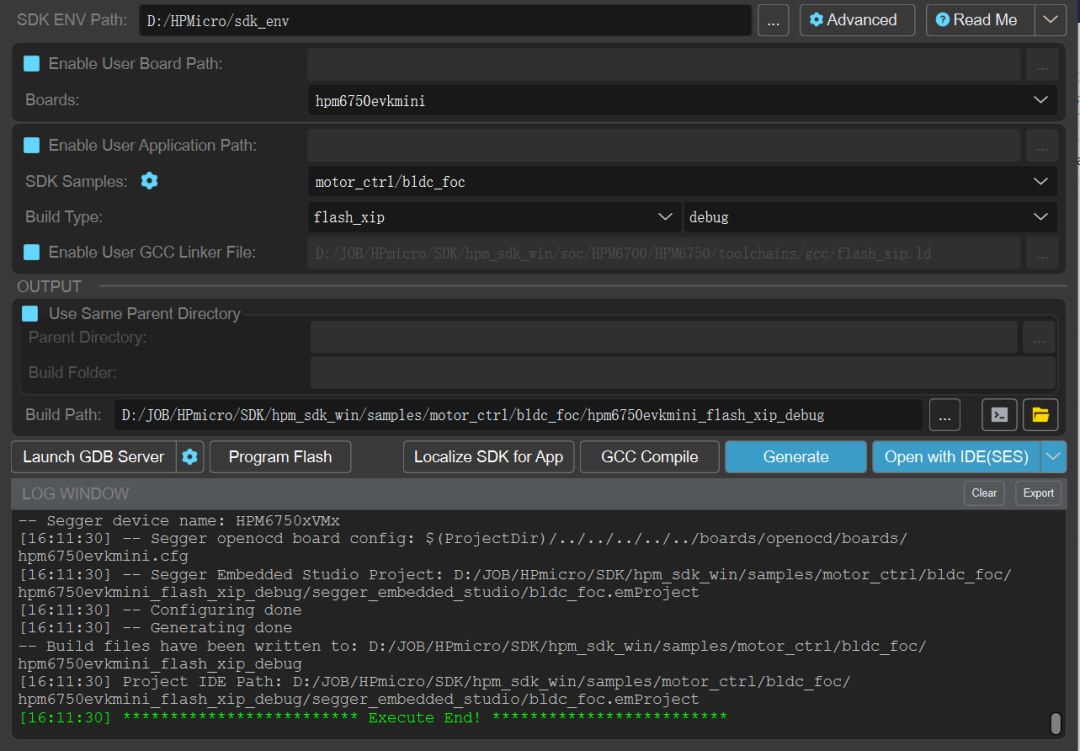
使用segger ide編譯程序并燒錄到MCU,注意Boot Pin的配置,此時程序會停在main函數入口
上電24V電源,電源電流不會超過 100ma,如果超過這個電流,請檢查線路是否短路
此時運行程序,電機會先抖動一下,進行傳感器的對中操作,因為采用拖動的方式進行,所以此時不要給電機施加過大負載,大約1s后完成操作,電機以20r/s的速度運行。
此時串口會有如下輸出
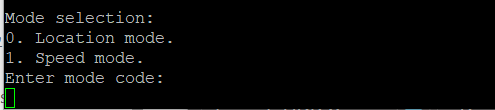
Location mode 是位置模式,也就是會使能位置環路
Speed mode 是速度模式,僅使能速度環路
如果選擇速度模式,可以在40r/s - -40r/s之間調整速度大小,支持小數輸入。
如果選擇位置模式, 輸入為整數,最大支持32bit的數據,4000代表電機正轉1圈,8000為正轉兩圈,-4000為電機反轉1圈,-8000為反轉2圈。
結 語
本文我們首先了解了一下foc控制的基本原理,然后介紹了如何使用先楫官方demo控制一個永磁同步電機。
下一篇文章我們會介紹
一個特性和官方電機不同的永磁同步電機在修改了哪些代碼和配置信息后可以把這個電機運行起來。
展開闡述SVPWM是如何實現的,以及它和SPWM的區別。
-
電機控制
+關注
關注
3568文章
1953瀏覽量
271474 -
電機庫
+關注
關注
0文章
6瀏覽量
2402 -
先楫半導體
+關注
關注
10文章
249瀏覽量
2602
發布評論請先 登錄





 工商網監
工商網監
評論