") 機(jī)器人視覺(jué)技術(shù)中圖像分割方法有哪些
機(jī)器人視覺(jué)技術(shù)中圖像分割方法有哪些
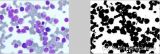
機(jī)器人視覺(jué)技術(shù)是人工智能領(lǐng)域的一個(gè)重要分支,它涉及到圖像處理、模式識(shí)別、機(jī)器學(xué)習(xí)等多個(gè)學(xué)科。圖像分割是機(jī)器人視覺(jué)技術(shù)中的一個(gè)重要環(huán)節(jié),它的目標(biāo)是從一幅圖像中將目標(biāo)物體與背景分離出來(lái),以便于后續(xù)的處理和分析。本文將詳細(xì)介紹圖像分割的各種方法,包括傳統(tǒng)的圖像處理方法和基于深度學(xué)習(xí)的方法。
- 閾值分割法
閾值分割法是一種基于像素的圖像分割方法,它通過(guò)設(shè)置一個(gè)或多個(gè)閾值,將圖像中的像素分為不同的類(lèi)別。閾值分割法可以分為全局閾值分割和局部閾值分割兩種。
1.1 全局閾值分割
全局閾值分割是最簡(jiǎn)單的閾值分割方法,它將整個(gè)圖像的像素值與一個(gè)固定的閾值進(jìn)行比較,將像素值大于閾值的像素歸為一類(lèi),小于閾值的像素歸為另一類(lèi)。全局閾值分割的關(guān)鍵在于如何選擇一個(gè)合適的閾值。常用的閾值確定方法有最大類(lèi)間方差法(Otsu方法)和迭代法等。
1.2 局部閾值分割
局部閾值分割是針對(duì)圖像中的不同區(qū)域設(shè)置不同的閾值進(jìn)行分割的方法。它通常使用圖像的局部特性,如局部均值、局部方差等,來(lái)確定每個(gè)像素的閾值。局部閾值分割的典型代表是自適應(yīng)閾值分割法(Adaptive Thresholding)。
- 邊緣檢測(cè)法
邊緣檢測(cè)法是一種基于圖像邊緣信息的分割方法,它通過(guò)檢測(cè)圖像中的邊緣來(lái)實(shí)現(xiàn)目標(biāo)物體與背景的分離。邊緣檢測(cè)法可以分為一階邊緣檢測(cè)和二階邊緣檢測(cè)兩種。
2.1 一階邊緣檢測(cè)
一階邊緣檢測(cè)是通過(guò)計(jì)算圖像的一階導(dǎo)數(shù)(即梯度)來(lái)檢測(cè)邊緣的方法。常用的一階邊緣檢測(cè)算子有Sobel算子、Prewitt算子和Roberts算子等。一階邊緣檢測(cè)的關(guān)鍵在于選擇合適的閾值來(lái)確定邊緣。
2.2 二階邊緣檢測(cè)
二階邊緣檢測(cè)是通過(guò)計(jì)算圖像的二階導(dǎo)數(shù)(即拉普拉斯算子)來(lái)檢測(cè)邊緣的方法。二階邊緣檢測(cè)的典型代表是Canny邊緣檢測(cè)器。Canny邊緣檢測(cè)器通過(guò)多步驟的過(guò)程來(lái)實(shí)現(xiàn)邊緣的檢測(cè),包括高斯濾波、梯度計(jì)算、非極大值抑制和滯后閾值處理等。
- 區(qū)域生長(zhǎng)法
區(qū)域生長(zhǎng)法是一種基于圖像局部特性的分割方法,它從一組種子點(diǎn)開(kāi)始,逐步將相鄰的像素點(diǎn)合并到種子點(diǎn)所在的區(qū)域中,直到滿(mǎn)足一定的終止條件。區(qū)域生長(zhǎng)法的關(guān)鍵在于如何選擇種子點(diǎn)、定義相似性準(zhǔn)則和確定終止條件。
- 聚類(lèi)分析法
聚類(lèi)分析法是一種基于圖像像素特征的分割方法,它將圖像中的像素點(diǎn)按照一定的相似性度量分成若干個(gè)類(lèi)別。聚類(lèi)分析法可以分為硬聚類(lèi)和軟聚類(lèi)兩種。
4.1 硬聚類(lèi)
硬聚類(lèi)是將每個(gè)像素點(diǎn)劃分到一個(gè)確定的類(lèi)別中,像素點(diǎn)只能屬于一個(gè)類(lèi)別。常用的硬聚類(lèi)算法有K-means算法、K-medians算法和層次聚類(lèi)算法等。
4.2 軟聚類(lèi)
軟聚類(lèi)是將每個(gè)像素點(diǎn)劃分到多個(gè)類(lèi)別中,像素點(diǎn)可以屬于多個(gè)類(lèi)別,并且每個(gè)類(lèi)別都有一個(gè)權(quán)重。常用的軟聚類(lèi)算法有模糊C-means算法和Gaussian Mixture Model(GMM)算法等。
- 圖割法
圖割法是一種基于圖論的圖像分割方法,它將圖像表示為一個(gè)圖,像素點(diǎn)作為圖的頂點(diǎn),像素點(diǎn)之間的相似性作為邊的權(quán)重。圖割法的目標(biāo)是找到一種切割方式,使得切割后的兩個(gè)子圖的相似性最小。常用的圖割算法有Normalized Cut(Ncut)算法和Ratio Cut算法等。
- 深度學(xué)習(xí)方法
深度學(xué)習(xí)方法是一種基于神經(jīng)網(wǎng)絡(luò)的圖像分割方法,它通過(guò)訓(xùn)練一個(gè)深度神經(jīng)網(wǎng)絡(luò)來(lái)實(shí)現(xiàn)圖像的分割。深度學(xué)習(xí)方法可以分為監(jiān)督學(xué)習(xí)和無(wú)監(jiān)督學(xué)習(xí)兩種。
6.1 監(jiān)督學(xué)習(xí)
監(jiān)督學(xué)習(xí)是通過(guò)訓(xùn)練一個(gè)深度神經(jīng)網(wǎng)絡(luò),使其能夠根據(jù)輸入的圖像和對(duì)應(yīng)的標(biāo)簽來(lái)實(shí)現(xiàn)圖像的分割。常用的監(jiān)督學(xué)習(xí)算法有全卷積網(wǎng)絡(luò)(FCN)、U-Net和Mask R-CNN等。
6.2 無(wú)監(jiān)督學(xué)習(xí)
無(wú)監(jiān)督學(xué)習(xí)是通過(guò)訓(xùn)練一個(gè)深度神經(jīng)網(wǎng)絡(luò),使其能夠自動(dòng)地從圖像中學(xué)習(xí)到分割的規(guī)律。常用的無(wú)監(jiān)督學(xué)習(xí)算法有自編碼器(Autoencoder)和生成對(duì)抗網(wǎng)絡(luò)(GAN)等。
-
圖像處理
+關(guān)注
關(guān)注
27文章
1318瀏覽量
57419 -
人工智能
+關(guān)注
關(guān)注
1802文章
48324瀏覽量
244039 -
圖像分割
+關(guān)注
關(guān)注
4文章
182瀏覽量
18160 -
機(jī)器人視覺(jué)
+關(guān)注
關(guān)注
0文章
49瀏覽量
10225
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
機(jī)器人視覺(jué)——機(jī)器人的“眼睛”
視覺(jué)機(jī)器人的發(fā)展現(xiàn)狀與趨勢(shì)
【下載】《機(jī)器人學(xué)、機(jī)器視覺(jué)與控制――MATLAB算法基礎(chǔ)》
基于深度學(xué)習(xí)技術(shù)的智能機(jī)器人
這些機(jī)器人視覺(jué)系統(tǒng)些關(guān)鍵技術(shù),你必須要知道
想設(shè)計(jì)炫酷的移動(dòng)機(jī)器人?視覺(jué)定位設(shè)計(jì)方案分享給你!
機(jī)器人視覺(jué)系統(tǒng)組成及定位算法分析
基于機(jī)器視覺(jué)的智能導(dǎo)覽機(jī)器人控制系統(tǒng)設(shè)計(jì)
基于圖像的機(jī)器人視覺(jué)伺服系統(tǒng)該怎么設(shè)計(jì)?
服務(wù)機(jī)器人的視覺(jué)系統(tǒng)怎么設(shè)計(jì)?
機(jī)器人視覺(jué)與機(jī)器視覺(jué)有什么不一樣?
深度學(xué)習(xí)中圖像分割的方法和應(yīng)用
機(jī)器視覺(jué)圖像分割的方法有哪些?
機(jī)器人視覺(jué)技術(shù)中常見(jiàn)的圖像分割方法
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線(xiàn)
- 接口/總線(xiàn)/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車(chē)電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專(zhuān)欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開(kāi)發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線(xiàn)研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀(guān)察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠(chǎng)房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論