 伺服驅動器需要設置哪些參數
伺服驅動器需要設置哪些參數
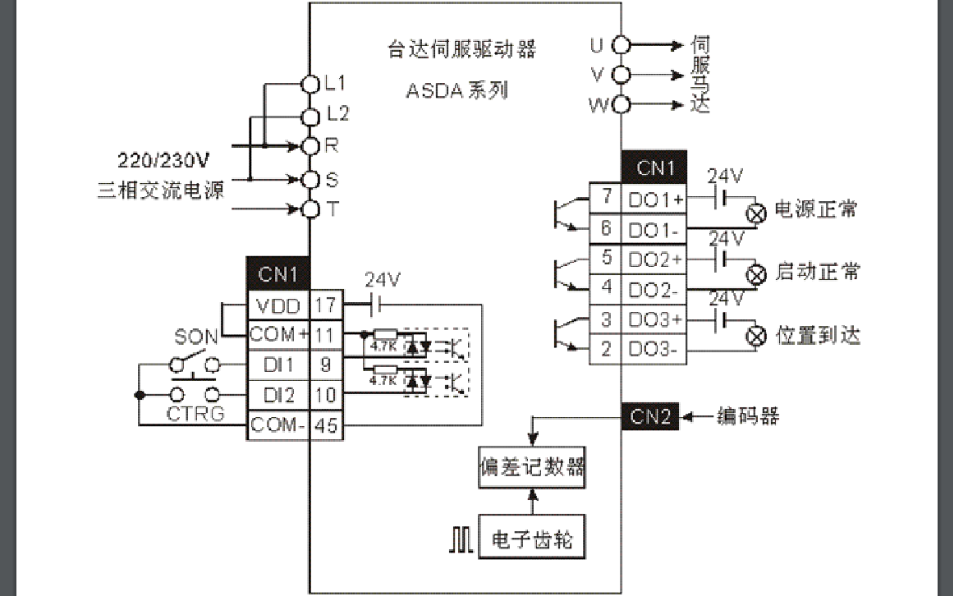
伺服驅動器是一種用于控制伺服電機的設備,它可以接收來自控制器的指令,并將指令轉換為電機的轉速、位置和扭矩等參數。為了使伺服驅動器正常工作,需要對驅動器進行一些參數設置。以下是一些常見的伺服驅動器參數設置:
- 電機參數設置
- 電機型號:選擇與伺服電機型號相匹配的驅動器型號。
- 額定功率:設置電機的額定功率,以確保驅動器能夠提供足夠的電流。
- 額定電壓:設置電機的額定電壓,以確保驅動器能夠提供正確的電壓。
- 額定轉速:設置電機的額定轉速,以確保驅動器能夠控制電機的速度。
- 額定扭矩:設置電機的額定扭矩,以確保驅動器能夠控制電機的扭矩。
- 驅動器參數設置
- 增益設置:設置驅動器的增益,以調整電機的響應速度和穩定性。
- 電流限制:設置驅動器的電流限制,以防止電機過載。
- 電壓限制:設置驅動器的電壓限制,以防止電機過壓。
- 速度限制:設置驅動器的速度限制,以防止電機超速。
- 加速度限制:設置驅動器的加速度限制,以防止電機加速過快。
- 通信參數設置
- 通信協議:選擇與控制器兼容的通信協議,如Modbus、CANopen等。
- 通信速率:設置驅動器的通信速率,以確保與控制器的通信順暢。
- 通信地址:設置驅動器的通信地址,以確保控制器能夠正確識別驅動器。
- 控制模式設置
- 位置控制:設置驅動器的位置控制模式,以實現精確的位置控制。
- 速度控制:設置驅動器的速度控制模式,以實現穩定的速度控制。
- 扭矩控制:設置驅動器的扭矩控制模式,以實現精確的扭矩控制。
- 運動參數設置
- 加速度:設置電機的加速度,以調整運動的平滑度和速度。
- 減速度:設置電機的減速度,以調整運動的平滑度和速度。
- 行程限制:設置電機的行程限制,以防止電機超出運動范圍。
- 故障診斷設置
- 故障類型:設置驅動器的故障類型,以便于故障診斷。
- 故障代碼:設置驅動器的故障代碼,以便于故障診斷。
- 故障記錄:設置驅動器的故障記錄功能,以便于故障分析。
- 安全設置
- 緊急停止:設置驅動器的緊急停止功能,以確保設備的安全。
- 過載保護:設置驅動器的過載保護功能,以防止電機過載。
- 過熱保護:設置驅動器的過熱保護功能,以防止電機過熱。
- 其他參數設置
- 電機極對數:設置電機的極對數,以確保驅動器能夠正確控制電機。
- 電機編碼器類型:設置電機編碼器的類型,如增量式、絕對式等。
- 電機編碼器分辨率:設置電機編碼器的分辨率,以提高位置控制的精度。
- 電機編碼器零點:設置電機編碼器的零點,以確保位置控制的準確性。
- 軟件設置
- 固件版本:檢查驅動器的固件版本,以確保驅動器與控制器兼容。
- 參數備份:備份驅動器的參數設置,以便于在需要時恢復。
- 參數恢復:恢復驅動器的參數設置,以便于在需要時恢復。
- 調試和優化
- 調試:在實際應用中,需要對驅動器進行調試,以確保其性能達到預期。
- 優化:根據實際應用的需求,對驅動器的參數進行優化,以提高其性能。
總之,伺服驅動器的參數設置是一個復雜的過程,需要根據實際應用的需求進行調整。在設置參數時,需要考慮電機的性能、驅動器的性能、控制器的性能以及實際應用的需求。通過合理的參數設置,可以提高伺服驅動器的性能,實現精確、穩定、高效的運動控制。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
編碼器
+關注
關注
45文章
3782瀏覽量
137417 -
參數
+關注
關注
11文章
1867瀏覽量
32909 -
伺服電機
+關注
關注
88文章
2107瀏覽量
59308 -
伺服驅動器
+關注
關注
22文章
518瀏覽量
32442
發布評論請先 登錄
相關推薦
熱點推薦
伺服驅動器需要什么樣的脈沖?
綜上所述,數控機床伺服驅動器的正確使用除按用戶手冊正確設置參數外,還應結合使用現場和負載情況,靈活操作。實際工作中,使用者只有具備較強的參數
教你設置伺服驅動器的8大參數
電路過流會影響功率器件,因此伺服放大器設置了嵌位電路以限制輸出轉矩,轉矩的限制可以通過模擬量或者參數設置進行調整。今天就分享下常見伺服驅動器
伺服驅動器的參數設置方法和故障排查技巧
電路過流會影響功率器件,因此伺服放大器設置了嵌位電路以限制輸出轉矩,轉矩的限制可以通過模擬量或者參數設置進行調整。今天就分享下常見伺服驅動器
安川伺服驅動器參數設置步驟
的安裝 2.1 環境要求 在安裝安川伺服驅動器之前,需要確保安裝環境滿足以下要求: 環境溫度:0℃~55℃; 相對濕度:10%~90%(無結露); 無腐蝕性氣體、無強烈振動、無強磁場干擾。 2.2 安裝步驟 將
安川伺服驅動怎么設置參數
安川伺服驅動器是一種高性能的伺服控制系統,廣泛應用于工業自動化領域。正確設置參數對于確保系統性能和穩定性至關重要。本文將詳細介紹安川
步進電機驅動器有哪些參數需要設置
步進電機驅動器是一種將電脈沖信號轉換為機械運動的裝置,廣泛應用于自動化設備、機器人、數控機床等領域。在使用步進電機驅動器時,需要對一些參數進行設置
伺服驅動器方向反了怎樣設置
運行。本文將詳細介紹伺服驅動器方向反了的原因、判斷方法以及解決方法,幫助用戶快速解決問題。 一、伺服驅動器方向反了的原因 接線錯誤 :伺服
松下伺服驅動器速度模式參數設置方法
松下伺服驅動器是一種廣泛應用于工業自動化領域的高性能驅動設備,具有高精度、高響應速度、高穩定性等特點。在實際應用中,用戶需要根據不同的控制需求對伺服
松下伺服驅動器剛性設置多少
松下伺服驅動器的剛性設置是其性能調整中的一個重要環節。剛性設置的目的是確保伺服電機在運行過程中能夠提供足夠的力矩,以保證系統的穩定性和精度。
伺服驅動器的作用與功能 伺服驅動器參數詳解
比例增益、位置前饋增益、速度比例增益、速度積分時間常數等,可以通過調試軟件設置參數。下面一起來了解一下伺服驅動器的作用與功能吧。一、伺服





 工商網監
工商網監
評論