") 拋棄高精度地圖舊模式,走向視覺感知新時代?
拋棄高精度地圖舊模式,走向視覺感知新時代?
自動駕駛技術(shù)自誕生以來,便被視為未來交通的重要發(fā)展方向。隨著科技的進步,自動駕駛車輛的智能化水平不斷提升,越來越多新技術(shù)被應(yīng)用到自動駕駛行業(yè)中,高精度地圖(HD Map)就是其中一項。高精度地圖作為自動駕駛系統(tǒng)的重要組成部分,為車輛提供了詳細的環(huán)境信息。然而,隨著深度學習和計算機視覺技術(shù)的快速發(fā)展,越來越多的企業(yè)和技術(shù)人員開始探索純視覺的自動駕駛方案,“重感知,輕地圖”在業(yè)內(nèi)已經(jīng)不是什么新鮮話題。這一技術(shù)轉(zhuǎn)變不僅帶來了技術(shù)上的挑戰(zhàn),也引發(fā)了關(guān)于未來自動駕駛技術(shù)發(fā)展的廣泛討論。本文將深入探討高精度地圖在自動駕駛中的作用,分析純視覺方案的興起及其技術(shù)基礎(chǔ),并展望未來自動駕駛技術(shù)的發(fā)展趨勢。
高精度地圖在自動駕駛中的角色
高精度地圖是指比傳統(tǒng)GPS導航地圖更精細、更詳細的地圖,通常包含厘米級甚至毫米級的精確信息。這些地圖為自動駕駛車輛提供了全面的環(huán)境感知能力,使其能夠在復雜的道路環(huán)境中實現(xiàn)精確定位和安全駕駛。
高精度地圖的組成部分
1.道路幾何形狀:高精度地圖記錄了道路的幾何形狀,包括車道線、道路寬度、坡度和曲率等信息。這些信息使得車輛能夠準確地在車道內(nèi)行駛,并提前調(diào)整速度和方向。2.道路標志:交通信號燈、標志牌的位置和內(nèi)容在高精度地圖中被精確標注。車輛可以通過地圖信息提前了解即將到來的交通信號和標志,從而做出相應(yīng)的駕駛決策。3.靜態(tài)物體:路緣、護欄、建筑物等靜態(tài)物體的精確位置也是高精度地圖的一部分。這些信息幫助車輛識別道路邊界,避免碰撞。4.動態(tài)信息:雖然高精度地圖主要記錄靜態(tài)信息,但也可以集成動態(tài)信息,如實時交通狀況、施工區(qū)域等。這些數(shù)據(jù)可以通過實時更新的方式提供給車輛,使其能夠更好地應(yīng)對突發(fā)情況。歐洲將高精度地圖圖層分成來靜態(tài)、準靜態(tài)、準動態(tài)和動態(tài)4層,中國則提出了將高精度地圖分為道路層、交通信息層,道路-車道連接層、車道層、地圖特征層、動態(tài)感知層、決策支持層7層的分類方法。但根據(jù)識別信息的運動形式和種類,可以大致分為動態(tài)要素和靜態(tài)要素。動態(tài)要素包含實時動態(tài)目標和非實時動態(tài)目標,而靜態(tài)要素包含道路交通設(shè)施、安全輔助數(shù)據(jù)、車道網(wǎng)及道路網(wǎng)等信息。
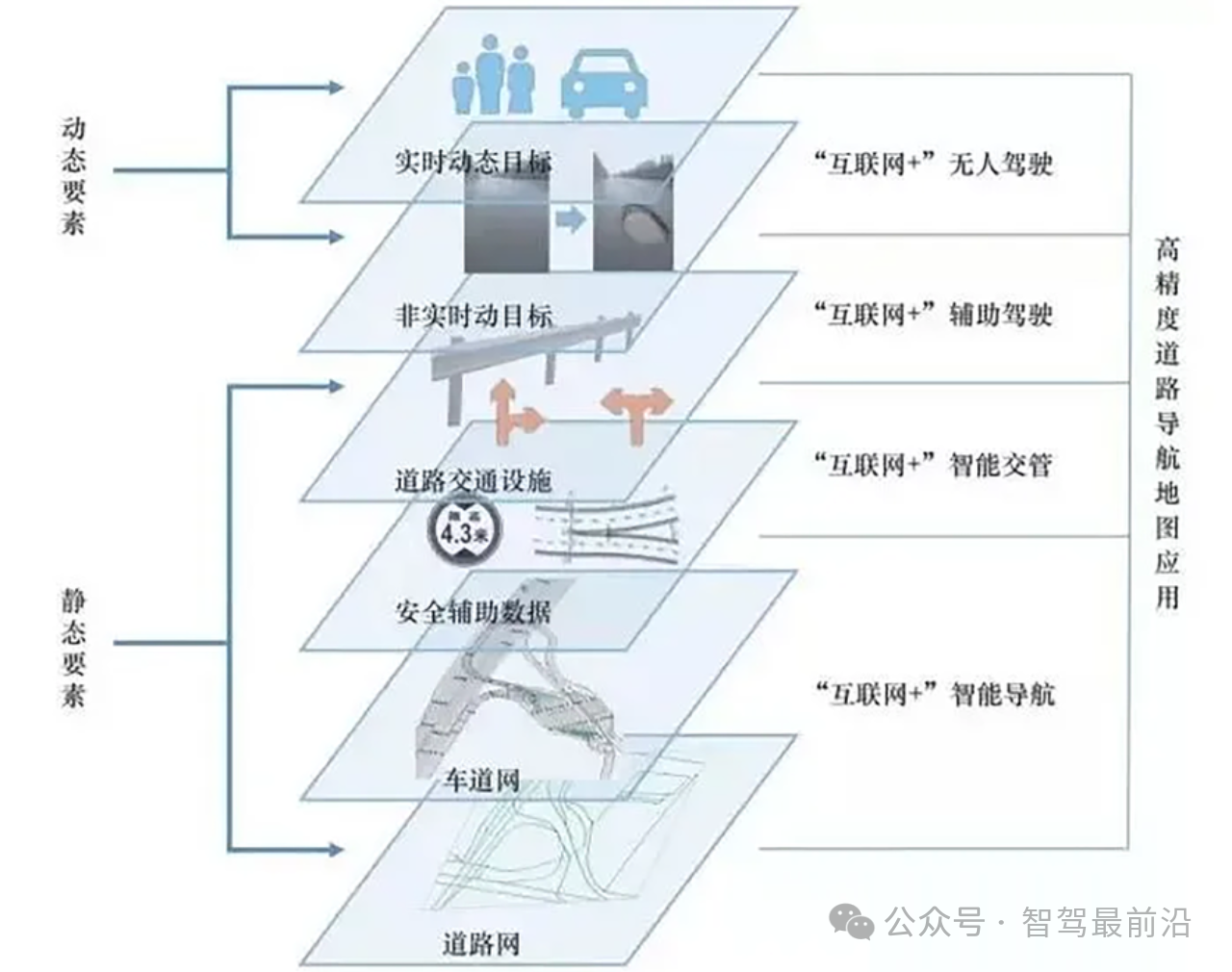
高精度地圖分層
高精度地圖的優(yōu)勢
高精度地圖的主要優(yōu)勢在于其精確性和全面性。通過預先獲取的詳細環(huán)境信息,自動駕駛車輛可以在復雜的城市環(huán)境中實現(xiàn)更高的安全性和可靠性。例如,在導航過程中,車輛可以根據(jù)地圖信息提前規(guī)劃路徑,避免擁堵和危險區(qū)域。此外,高精度地圖還可以幫助車輛在隧道、高架橋等GPS信號較弱的地方保持精確定位。
高精度地圖的挑戰(zhàn)
盡管高精度地圖在自動駕駛中具有重要作用,但其也面臨諸多挑戰(zhàn):1、數(shù)據(jù)采集和更新成本高:高精度地圖需要大量的數(shù)據(jù)采集和更新工作。這包括使用激光雷達、相機等傳感器對道路、交通標志、道路標線等進行精確的掃描和記錄。這些傳感器產(chǎn)生的數(shù)據(jù)需要經(jīng)過處理和驗證,以生成準確的高精度地圖。然而,采集和處理這些數(shù)據(jù)的過程非常耗時且昂貴。此外,為了保持高精度地圖的最新性,還需要定期進行更新,這意味著持續(xù)的數(shù)據(jù)采集和處理成本。2.、依賴性強:自動駕駛系統(tǒng)過度依賴高精度地圖,一旦地圖信息不準確或缺失,車輛的可靠性和安全性將大打折扣。如果使用高精度地圖,就需確保高精度地圖的完整性和實時性,這也對高精度地圖的技術(shù)提出了很高的要求。3、維護和更新復雜:道路網(wǎng)絡(luò)的動態(tài)性使得高精度地圖的維護和更新變得復雜。道路建設(shè)、交通標志更改、交通狀況的變化等都會對地圖數(shù)據(jù)產(chǎn)生影響。因此,高精度地圖需要及時的更新和維護,以確保其準確性和可靠性。這需要建立一個有效的反饋機制,收集來自駕駛者、城市規(guī)劃部門和其他數(shù)據(jù)源的信息,以及專業(yè)團隊對數(shù)據(jù)的驗證和更新。4、隱私和安全問題:高精度地圖涉及大量的位置數(shù)據(jù)和道路信息。保護用戶的隱私和地圖數(shù)據(jù)的安全是一個重要的考慮因素。地圖供應(yīng)商和相關(guān)利益方需要確保數(shù)據(jù)的安全存儲、傳輸和處理,并制定合規(guī)性政策和措施,以保護用戶隱私和防止地圖數(shù)據(jù)的濫用。5、地理覆蓋范圍有限:構(gòu)建高精度地圖需要大量的人力和物力資源。因此,在初期階段,高精度地圖主要覆蓋城市和主要道路網(wǎng)絡(luò),而較偏遠地區(qū)和農(nóng)村地區(qū)的地圖數(shù)據(jù)可能相對不完整。這是由于數(shù)據(jù)采集困難、覆蓋范圍較小以及資金和資源限制等因素導致的。這限制了自動駕駛車輛在廣泛地理區(qū)域內(nèi)的應(yīng)用和普及。6、標準和協(xié)議缺乏統(tǒng)一:自動駕駛車輛所需的高精度地圖需要與車輛的傳感器和控制系統(tǒng)進行有效的集成。然而,由于缺乏統(tǒng)一的標準和協(xié)議,不同高精度地圖供應(yīng)商和車輛制造商之間的互操作性存在困難。這使得地圖數(shù)據(jù)的交換和使用變得復雜,導致了更高的成本和技術(shù)難度。缺乏統(tǒng)一的標準和協(xié)議會阻礙地圖數(shù)據(jù)的無縫集成和共享,限制了自動駕駛車輛的普及。
純視覺方案的興起
隨著深度學習和計算機視覺技術(shù)的快速發(fā)展,使用攝像頭進行環(huán)境感知和決策的純視覺方案逐漸成為可能。特斯拉等公司在這一領(lǐng)域進行了大量探索和實踐,并取得了一定的成果。在國內(nèi)企業(yè)中,如廣汽、華為、吉利等企業(yè)均在探索純視覺自動駕駛方案。
純視覺方案的技術(shù)基礎(chǔ)
純視覺方案依賴于攝像頭和計算機視覺技術(shù),通過深度學習算法實現(xiàn)對環(huán)境的感知和理解。其核心技術(shù)包括:
1. 深度學習算法
卷積神經(jīng)網(wǎng)絡(luò)(CNN)
卷積神經(jīng)網(wǎng)絡(luò)是深度學習的核心技術(shù)之一,廣泛應(yīng)用于圖像識別和分類任務(wù)。CNN通過卷積層、池化層和全連接層的組合,能夠有效地提取圖像中的特征,實現(xiàn)目標檢測、物體識別和語義分割等任務(wù)。
? 目標檢測:識別并定位圖像中的特定物體,如行人、車輛、交通標志等。常用的目標檢測模型包括YOLO(You Only Look Once)、SSD(Single Shot MultiBox Detector)和Faster R-CNN等。
? 語義分割:對圖像中的每個像素進行分類,識別出道路、車道線、障礙物等。常用的語義分割模型包括UNet、DeepLab等。
循環(huán)神經(jīng)網(wǎng)絡(luò)(RNN)和長短期記憶網(wǎng)絡(luò)(LSTM)
RNN和LSTM用于處理序列數(shù)據(jù),如視頻幀序列。LSTM能夠捕捉時間序列中的長期依賴關(guān)系,在自動駕駛中用于行為預測和軌跡規(guī)劃。
Transformer
Transformer架構(gòu)在自然語言處理和計算機視覺領(lǐng)域都取得了顯著的效果。Vision Transformer(ViT)將Transformer應(yīng)用于圖像處理,通過自注意力機制捕捉全局特征,提升視覺感知能力。
2. SLAM(Simultaneous Localization and Mapping)
SLAM技術(shù)用于在未知環(huán)境中同步進行定位與地圖構(gòu)建。通過攝像頭獲取的圖像序列,SLAM算法可以構(gòu)建出環(huán)境的三維地圖,并在其中確定車輛的位置。SLAM的主要步驟包括:
? 特征提取:從圖像中提取關(guān)鍵特征點,如ORB(Oriented FAST and Rotated BRIEF)特征。
? 特征匹配:將不同幀圖像中的特征點進行匹配,確定相對運動。
? 姿態(tài)估計:利用匹配的特征點,估計相機的相對位姿變化。
? 地圖更新:根據(jù)估計的位姿變化,更新環(huán)境的三維地圖。
常用的視覺SLAM算法包括ORB-SLAM、LSD-SLAM和DSO(Direct Sparse Odometry)等。
3. 視覺里程計
視覺里程計用于估計車輛的運動軌跡。通過攝像頭獲取的連續(xù)圖像,視覺里程計算法計算出相對位移和旋轉(zhuǎn)角度。常見的視覺里程計方法包括:
? 特征點法:提取并跟蹤圖像中的特征點,通過三角測量計算相對運動。
? 直接法:直接使用圖像的像素強度進行匹配和優(yōu)化,計算相對運動。
視覺里程計可以在沒有GPS信號的情況下,提供相對精確的定位信息。
4. 行為決策與路徑規(guī)劃
純視覺方案需要通過攝像頭獲取的環(huán)境信息進行行為決策和路徑規(guī)劃。這部分依賴于強化學習和規(guī)劃算法:
? 強化學習:通過模擬訓練,讓車輛在虛擬環(huán)境中進行自我學習,逐漸優(yōu)化其行為策略。常用的強化學習算法包括DQN(Deep Q-Network)、DDPG(Deep Deterministic Policy Gradient)和PPO(Proximal Policy Optimization)等。
? 路徑規(guī)劃:根據(jù)感知到的環(huán)境信息,規(guī)劃出安全可行的行駛路徑。常用的路徑規(guī)劃算法包括A*算法、Dijkstra算法和RRT(Rapidly-exploring Random Tree)等。
5. 數(shù)據(jù)增強與合成
為了提高模型的魯棒性和泛化能力,純視覺方案需要大量的訓練數(shù)據(jù)。數(shù)據(jù)增強和合成技術(shù)可以有效擴展數(shù)據(jù)集,包括:
? 數(shù)據(jù)增強:通過對現(xiàn)有數(shù)據(jù)進行變換(如旋轉(zhuǎn)、裁剪、顏色變換等),生成更多樣化的訓練樣本。
? 數(shù)據(jù)合成:利用計算機圖形技術(shù)生成模擬環(huán)境中的圖像和視頻,進行模型訓練。
仿真環(huán)境
仿真環(huán)境在自動駕駛的開發(fā)和測試中起著重要作用。常用的仿真平臺包括:
? CARLA:開源的自動駕駛仿真平臺,提供高度可定制的城市環(huán)境和多種傳感器模擬。
? Apollo:百度的開源自動駕駛平臺,包含豐富的仿真工具和數(shù)據(jù)集。
6. 集成與優(yōu)化
純視覺方案需要將多個子系統(tǒng)進行集成和優(yōu)化,以實現(xiàn)整體的自動駕駛能力。這包括:
? 多傳感器融合:盡管是純視覺方案,但在某些情況下,可以結(jié)合其他傳感器(如IMU、GPS)進行數(shù)據(jù)融合,提高系統(tǒng)的魯棒性。
? 實時處理與優(yōu)化:優(yōu)化算法和硬件,使系統(tǒng)能夠在實時性和計算資源之間找到平衡。
純視覺方案的優(yōu)勢
純視覺方案相比傳統(tǒng)的多傳感器融合方案,具有以下優(yōu)勢:
1. 成本低廉
純視覺方案主要依賴攝像頭,而攝像頭相比其他傳感器(如激光雷達、毫米波雷達)具有明顯的成本優(yōu)勢。攝像頭的制造和維護成本較低,易于大規(guī)模生產(chǎn)和部署,從而降低了自動駕駛系統(tǒng)的整體成本。這使得自動駕駛技術(shù)更容易被市場接受和推廣,尤其是在對成本敏感的消費級市場。
2. 硬件安裝與集成簡單
攝像頭的安裝和集成相對簡單,不需要復雜的硬件結(jié)構(gòu)和安裝工藝。攝像頭可以輕松地安裝在車輛的不同位置,如車頭、車尾、車頂和車內(nèi)等,提供全方位的視野。此外,攝像頭體積小、重量輕,不會對車輛的外觀和結(jié)構(gòu)產(chǎn)生顯著影響。
3. 提供豐富的環(huán)境信息
攝像頭能夠捕捉到豐富的視覺信息,包括顏色、形狀、紋理和動態(tài)變化等。這些信息可以用于識別和分類道路上的各類物體,如車輛、行人、交通標志、車道線等。相比其他傳感器,攝像頭提供的圖像信息更加直觀和全面,有助于提高環(huán)境感知的精度和可靠性。
4. 無需高精度地圖依賴
純視覺方案可以在沒有高精度地圖的情況下,實現(xiàn)自動駕駛的基本功能。通過實時處理攝像頭捕捉的圖像,車輛可以動態(tài)感知環(huán)境并做出決策,減少了對預先構(gòu)建和維護高精度地圖的依賴。這在快速變化和復雜的城市環(huán)境中尤其有用,減少了高精度地圖更新和維護的頻率和成本。
5. 數(shù)據(jù)獲取與訓練便利
攝像頭捕捉的圖像數(shù)據(jù)可以直接用于訓練深度學習模型。相較于激光雷達等其他傳感器數(shù)據(jù),圖像數(shù)據(jù)的獲取更加簡單和廉價,數(shù)據(jù)量也更大。這有助于構(gòu)建大規(guī)模的訓練數(shù)據(jù)集,提高模型的泛化能力和魯棒性。此外,圖像數(shù)據(jù)的標注和處理工具相對成熟,進一步降低了數(shù)據(jù)處理的難度。
6. 適應(yīng)性強
純視覺方案能夠適應(yīng)多種駕駛環(huán)境和場景。通過使用不同的攝像頭配置和深度學習模型,純視覺方案可以在城市道路、高速公路、鄉(xiāng)村道路等多種場景下工作。此外,純視覺方案可以通過數(shù)據(jù)增強和仿真訓練等技術(shù),提升對各種天氣條件(如晴天、雨天、霧天、夜晚)的適應(yīng)性。
7. 實時處理能力
隨著計算機視覺和深度學習技術(shù)的進步,實時處理高分辨率圖像的能力大大提高。現(xiàn)代GPU和專用AI芯片可以高效地處理攝像頭捕捉的圖像數(shù)據(jù),實時生成環(huán)境感知結(jié)果和駕駛決策。這為純視覺方案提供了實時響應(yīng)能力,保證自動駕駛系統(tǒng)的安全性和可靠性。
8. 簡化系統(tǒng)架構(gòu)
純視覺方案可以簡化自動駕駛系統(tǒng)的整體架構(gòu)。相比多傳感器融合方案,純視覺方案減少了傳感器種類和數(shù)據(jù)融合的復雜性,降低了系統(tǒng)集成和維護的難度。簡化的系統(tǒng)架構(gòu)有助于提高系統(tǒng)的穩(wěn)定性和可靠性,降低故障率。
9. 創(chuàng)新和進步潛力大
計算機視覺和深度學習是當前科技領(lǐng)域的熱門研究方向,具有廣闊的發(fā)展前景。不斷涌現(xiàn)的新算法、新模型和新技術(shù),可以持續(xù)提升純視覺方案的性能和能力。例如,Transformer架構(gòu)、強化學習、生成對抗網(wǎng)絡(luò)(GAN)等技術(shù)的應(yīng)用,可以進一步增強純視覺方案的環(huán)境感知和決策能力。
純視覺自動駕駛方案憑借其成本低廉、硬件安裝與集成簡單、提供豐富環(huán)境信息、無需高精度地圖依賴、數(shù)據(jù)獲取與訓練便利、適應(yīng)性強、實時處理能力、簡化系統(tǒng)架構(gòu)和創(chuàng)新進步潛力大等優(yōu)勢,成為自動駕駛技術(shù)的重要發(fā)展方向。盡管純視覺方案面臨諸多挑戰(zhàn),如環(huán)境感知精度和計算資源需求,但隨著技術(shù)的不斷進步和優(yōu)化,純視覺方案有望在未來自動駕駛的發(fā)展中發(fā)揮越來越重要的作用。
純視覺方案的挑戰(zhàn)
盡管純視覺方案展示出了巨大的潛力,但在實際應(yīng)用中仍面臨一些挑戰(zhàn):
1. 環(huán)境感知精度和魯棒性
光照變化
攝像頭在不同光照條件下的表現(xiàn)差異較大。在強光、陰影、黃昏和夜間等環(huán)境中,圖像質(zhì)量和清晰度可能會顯著下降,影響環(huán)境感知的準確性。攝像頭在眩光或逆光條件下,識別道路和物體的能力會受限。
惡劣天氣條件
攝像頭在雨雪、霧霾等惡劣天氣條件下的性能有限。雨滴、積雪和霧氣可能會模糊圖像,遮擋視野,導致感知精度降低。在這種情況下,車輛可能難以準確識別車道、障礙物和交通標志。
動態(tài)環(huán)境變化
在復雜和動態(tài)的駕駛環(huán)境中,攝像頭需要處理大量快速變化的信息。例如,在城市環(huán)境中,行人、車輛和自行車等交通參與者的行為難以預測。攝像頭需要高效處理這些動態(tài)變化,以確保安全駕駛。
2. 計算資源需求
高分辨率圖像處理
純視覺方案需要處理高分辨率圖像,以實現(xiàn)精確的環(huán)境感知。這對計算資源提出了很高的要求,需要強大的計算能力和高效的算法來實時處理圖像數(shù)據(jù)。
實時性要求
自動駕駛系統(tǒng)需要在短時間內(nèi)完成環(huán)境感知、路徑規(guī)劃和決策等任務(wù)。純視覺方案需要高性能的硬件支持,如GPU和專用AI芯片,以保證系統(tǒng)的實時性和響應(yīng)速度。
3. 數(shù)據(jù)依賴與標注
大規(guī)模數(shù)據(jù)需求
純視覺方案依賴于大量的標注數(shù)據(jù)進行訓練。獲取和處理大規(guī)模的圖像數(shù)據(jù)需要耗費大量的人力和物力資源,數(shù)據(jù)標注工作也非常繁瑣。
數(shù)據(jù)質(zhì)量和多樣性
訓練數(shù)據(jù)的質(zhì)量和多樣性直接影響模型的性能。純視覺方案需要涵蓋各種駕駛場景和條件的數(shù)據(jù),以提高模型的泛化能力和魯棒性。確保數(shù)據(jù)的多樣性和代表性是一個重要的挑戰(zhàn)。
4. 系統(tǒng)魯棒性和安全性
單一傳感器依賴
純視覺方案主要依賴攝像頭進行環(huán)境感知,缺乏多傳感器融合的冗余性。攝像頭在某些情況下可能會失效,如被遮擋或損壞,導致系統(tǒng)魯棒性和安全性下降。
突發(fā)情況應(yīng)對
純視覺方案在應(yīng)對突發(fā)情況和異常事件時可能表現(xiàn)不佳。例如,突然出現(xiàn)的障礙物或緊急制動情況下,系統(tǒng)需要快速響應(yīng)和決策,純視覺方案在這種高壓條件下的表現(xiàn)需要進一步驗證和優(yōu)化。
5. 法規(guī)和安全標準
法規(guī)合規(guī)性
自動駕駛技術(shù)的發(fā)展受到各國法規(guī)和標準的嚴格監(jiān)管。純視覺方案需要滿足各類安全標準和法規(guī)要求,確保系統(tǒng)在實際道路上的安全性和可靠性。
安全認證
純視覺自動駕駛系統(tǒng)需要通過嚴格的安全認證和測試,以證明其在各種駕駛環(huán)境和條件下的安全性。這包括功能安全、系統(tǒng)冗余、故障診斷等方面的全面評估。
自動駕駛技術(shù)的未來趨勢及挑戰(zhàn)
未來的自動駕駛技術(shù)可能會趨向于融合多種感知方案。盡管純視覺方案展示出了巨大的潛力,但在某些復雜場景下,單一感知方式難以保證足夠的安全性和可靠性。因此,混合感知方案將成為主流,即結(jié)合攝像頭、雷達、激光雷達等多種傳感器,以取長補短,提升整體系統(tǒng)的魯棒性和可靠性。
多傳感器融合方案
常用傳感器
1. 攝像頭
攝像頭能夠捕捉豐富的視覺信息,如顏色、形狀、紋理等,用于物體識別、語義分割和目標檢測。常用的攝像頭類型包括RGB攝像頭、單目攝像頭、雙目攝像頭和環(huán)視攝像頭。
2. 激光雷達(LiDAR)
激光雷達通過發(fā)射激光脈沖并測量反射時間,生成高精度的三維點云數(shù)據(jù)。LiDAR能夠精確測量物體的距離、形狀和位置,尤其在夜間和復雜環(huán)境中表現(xiàn)優(yōu)異。
3. 毫米波雷達
毫米波雷達通過發(fā)射和接收毫米波信號,檢測物體的距離、速度和相對位置。雷達對天氣條件不敏感,能夠在雨雪和霧霾等惡劣環(huán)境下穩(wěn)定工作。
4. 超聲波傳感器
超聲波傳感器通過發(fā)射和接收超聲波信號,測量近距離物體的距離。超聲波傳感器通常用于低速行駛和停車輔助系統(tǒng)中。
5. 全球定位系統(tǒng)(GPS)
GPS提供精確的位置信息,輔助車輛進行全球?qū)Ш胶投ㄎ弧2罘諫PS(DGPS)和實時動態(tài)GPS(RTK-GPS)能夠提供更高的定位精度。
6. 慣性測量單元(IMU)
IMU包括加速度計和陀螺儀,測量車輛的加速度和角速度。IMU在短時間內(nèi)提供精確的位姿變化信息,輔助車輛進行定位和姿態(tài)估計。
數(shù)據(jù)融合方法
1. 低級數(shù)據(jù)融合
低級數(shù)據(jù)融合直接處理傳感器的原始數(shù)據(jù),將來自不同傳感器的原始數(shù)據(jù)融合在一起,生成一個綜合的環(huán)境感知結(jié)果。例如,將激光雷達的點云數(shù)據(jù)和攝像頭的圖像數(shù)據(jù)進行融合,生成帶有顏色信息的三維點云。
2. 中級數(shù)據(jù)融合
中級數(shù)據(jù)融合處理傳感器的特征數(shù)據(jù),將不同傳感器提取的特征數(shù)據(jù)進行融合。例如,將攝像頭提取的邊緣特征和激光雷達提取的距離特征進行融合,生成更精確的物體檢測結(jié)果。
3. 高級數(shù)據(jù)融合
高級數(shù)據(jù)融合處理傳感器的決策數(shù)據(jù),將不同傳感器的感知結(jié)果進行融合,生成最終的決策結(jié)果。例如,將攝像頭識別的行人、激光雷達檢測的障礙物和雷達測量的車速進行綜合,生成安全的行駛路徑和決策。
4. 時間同步與空間校準
數(shù)據(jù)融合需要進行時間同步和空間校準,以確保不同傳感器的數(shù)據(jù)在相同時間和空間坐標系下進行融合。時間同步通過時鐘同步技術(shù)實現(xiàn),空間校準通過傳感器安裝位置和角度的標定實現(xiàn)。
多傳感器融合的優(yōu)勢
1. 提高環(huán)境感知精度
多傳感器融合能夠結(jié)合不同傳感器的優(yōu)勢,提高環(huán)境感知的精度和可靠性。例如,激光雷達提供的高精度三維點云數(shù)據(jù)結(jié)合攝像頭提供的豐富視覺信息,可以實現(xiàn)更準確的物體識別和定位。
2. 增強系統(tǒng)魯棒性
不同傳感器對環(huán)境變化的敏感度不同,多傳感器融合能夠在某一傳感器失效或性能下降時,通過其他傳感器的數(shù)據(jù)維持系統(tǒng)的穩(wěn)定性和可靠性。例如,攝像頭在強光或惡劣天氣條件下性能下降時,雷達和激光雷達仍能提供可靠的環(huán)境感知數(shù)據(jù)。
3. 擴展感知范圍
多傳感器融合能夠擴展環(huán)境感知的范圍,覆蓋更廣的距離和視角。例如,雷達可以檢測遠距離物體,激光雷達提供精確的近距離三維點云,攝像頭捕捉全方位的視覺信息,綜合提升感知能力。
4. 提供冗余性
冗余設(shè)計是自動駕駛系統(tǒng)的重要安全保障。多傳感器融合能夠在不同傳感器之間提供冗余,當某一傳感器故障時,其他傳感器仍能繼續(xù)工作,保證系統(tǒng)的安全性和可靠性。
多傳感器融合的挑戰(zhàn)
1. 數(shù)據(jù)處理與計算資源
多傳感器融合需要處理大量的傳感器數(shù)據(jù),對計算資源提出了很高的要求。特別是在實時環(huán)境中,需要高效的算法和強大的計算能力來處理和融合不同傳感器的數(shù)據(jù)。
2. 時間同步與空間校準
不同傳感器的數(shù)據(jù)需要在時間和空間上進行精確的同步和校準。這需要復雜的標定和同步技術(shù),以確保數(shù)據(jù)融合的準確性和一致性。
3. 數(shù)據(jù)傳輸帶寬
多傳感器融合需要高帶寬的數(shù)據(jù)傳輸能力,以保證不同傳感器的數(shù)據(jù)能夠及時傳輸和處理。特別是在高分辨率攝像頭和激光雷達等大數(shù)據(jù)量傳感器的應(yīng)用中,數(shù)據(jù)傳輸帶寬是一個關(guān)鍵問題。
4. 系統(tǒng)復雜性
多傳感器融合增加了系統(tǒng)的復雜性,需要集成和管理多種傳感器及其數(shù)據(jù)。這對系統(tǒng)設(shè)計、硬件集成和軟件開發(fā)提出了更高的要求,需要高度協(xié)調(diào)和優(yōu)化。
5. 故障檢測與恢復
多傳感器融合系統(tǒng)需要具備故障檢測和恢復能力,以應(yīng)對傳感器故障或數(shù)據(jù)異常情況。設(shè)計可靠的故障檢測和恢復機制,確保系統(tǒng)在異常情況下仍能安全運行,是一個重要的挑戰(zhàn)。
多傳感器融合方案在自動駕駛中具有顯著的優(yōu)勢,包括提高環(huán)境感知精度、增強系統(tǒng)魯棒性、擴展感知范圍和提供冗余性等。然而,多傳感器融合也面臨數(shù)據(jù)處理與計算資源、時間同步與空間校準、數(shù)據(jù)傳輸帶寬、系統(tǒng)復雜性和故障檢測與恢復等挑戰(zhàn)。隨著技術(shù)的不斷進步和優(yōu)化,多傳感器融合有望在未來自動駕駛的發(fā)展中發(fā)揮越來越重要的作用,推動自動駕駛技術(shù)的進一步成熟和普及。
V2X技術(shù)的應(yīng)用
V2X技術(shù)的組成
1. V2V(Vehicle-to-Vehicle)
V2V通信使車輛之間可以互相傳遞信息,如位置、速度、加速度、行駛方向等。這種信息交換可以幫助車輛提前了解周圍交通狀況,避免碰撞事故,提高行駛安全性。
2. V2I(Vehicle-to-Infrastructure)
V2I通信使車輛可以與交通基礎(chǔ)設(shè)施(如交通信號燈、路邊單元等)進行信息交換。車輛可以獲取交通信號狀態(tài)、道路狀況、施工信息等,從而優(yōu)化行駛路徑和速度,減少擁堵和延誤。
3. V2P(Vehicle-to-Pedestrian)
V2P通信使車輛與行人之間可以進行信息交換。行人攜帶的智能設(shè)備(如手機)可以向車輛發(fā)送位置信息,車輛可以通過提醒和避讓措施,提升行人安全。
4. V2N(Vehicle-to-Network)
V2N通信使車輛可以連接到互聯(lián)網(wǎng)和云端服務(wù),獲取實時交通信息、天氣預報、導航數(shù)據(jù)等。通過V2N,車輛可以實現(xiàn)信息的實時更新和共享,提高駕駛的便利性和智能化程度。
V2X技術(shù)的應(yīng)用場景
1. 交通安全
碰撞預警
通過V2V通信,車輛可以互相傳遞位置、速度和行駛方向等信息。當系統(tǒng)檢測到可能發(fā)生碰撞的情況時,會提前發(fā)出預警信號,提醒駕駛員或自動駕駛系統(tǒng)采取避讓措施。例如,在盲區(qū)、交叉路口或高速公路上,V2X技術(shù)可以顯著降低碰撞風險。
紅綠燈提醒與優(yōu)先通行
通過V2I通信,車輛可以獲取前方交通信號燈的狀態(tài)和變化時間,從而優(yōu)化行駛速度,減少等待時間。此外,緊急車輛(如救護車、消防車)可以通過V2I通信實現(xiàn)優(yōu)先通行,減少緊急救援時間。
行人保護
通過V2P通信,車輛可以檢測到附近的行人,并在行人可能穿越道路時發(fā)出預警信號,提醒駕駛員或自動駕駛系統(tǒng)采取避讓措施。行人也可以通過智能設(shè)備收到車輛的提醒信息,避免交通事故。
2. 交通效率
智能交通管理
通過V2X技術(shù),交通管理系統(tǒng)可以實時監(jiān)控和管理道路上的車輛流量,優(yōu)化交通信號燈的時序,減少交通擁堵。車輛可以根據(jù)實時交通信息調(diào)整行駛路徑和速度,提高交通流暢度和整體效率。
動態(tài)路徑規(guī)劃
通過V2N通信,車輛可以獲取實時的道路信息和交通狀況,如道路封閉、交通事故、擁堵情況等。基于這些信息,自動駕駛系統(tǒng)可以動態(tài)調(diào)整行駛路徑,選擇最優(yōu)路線,減少行駛時間和油耗。
3. 駕駛體驗
自適應(yīng)巡航控制
通過V2V通信,車輛可以實時獲取前方車輛的行駛狀態(tài)信息,調(diào)整自身的速度和距離,實現(xiàn)更平穩(wěn)的自適應(yīng)巡航控制。相比傳統(tǒng)的基于雷達和攝像頭的巡航控制,V2V通信可以提供更遠距離和更準確的信息,提高駕駛的舒適性和安全性。
無縫停車
通過V2I通信,車輛可以與停車場基礎(chǔ)設(shè)施進行信息交換,獲取空余停車位信息,實現(xiàn)自動泊車。車輛可以自主規(guī)劃泊車路徑,完成停車操作,減少駕駛員的負擔。
高速公路車隊行駛
通過V2V通信,車輛可以組隊行駛,保持固定的車距和車速。車隊行駛可以減少空氣阻力,提高燃油效率,并通過協(xié)調(diào)變道和加速等操作,提高整體行駛的安全性和效率。
V2X技術(shù)的優(yōu)勢
隨著5G和V2X(車聯(lián)網(wǎng))技術(shù)的發(fā)展,車輛之間、車輛與基礎(chǔ)設(shè)施之間的實時數(shù)據(jù)共享將進一步增強自動駕駛系統(tǒng)的感知和決策能力。V2X技術(shù)可以提供更多實時的環(huán)境信息,如前方路段的交通狀況、交通信號燈狀態(tài)等,提升自動駕駛系統(tǒng)的動態(tài)感知能力。
提高交通安全
V2X技術(shù)通過實時信息交換和預警機制,可以提前發(fā)現(xiàn)潛在的危險情況,減少交通事故的發(fā)生。
提升交通效率
通過智能交通管理和動態(tài)路徑規(guī)劃,V2X技術(shù)可以減少交通擁堵,優(yōu)化道路資源利用,提高行駛效率。
增強駕駛體驗
V2X技術(shù)提供的實時信息和智能輔助功能,可以提高駕駛的便利性和舒適性,減少駕駛員的負擔。
支持自動駕駛發(fā)展
V2X技術(shù)為自動駕駛系統(tǒng)提供了更多的環(huán)境感知信息和決策支持,增強了自動駕駛系統(tǒng)的智能化和安全性。
V2X技術(shù)的挑戰(zhàn)
通信標準與互操作性
V2X技術(shù)需要統(tǒng)一的通信標準和協(xié)議,以確保不同廠商的車輛和基礎(chǔ)設(shè)施之間能夠互相通信和協(xié)同工作。目前,DSRC(Dedicated Short Range Communications)和C-V2X(Cellular Vehicle-to-Everything)是兩種主要的V2X通信技術(shù),二者在標準和應(yīng)用上存在一定差異。
數(shù)據(jù)安全與隱私
V2X技術(shù)涉及大量的車輛和個人數(shù)據(jù),必須確保數(shù)據(jù)的安全傳輸和存儲,防止數(shù)據(jù)泄露和惡意攻擊。同時,需要制定相應(yīng)的隱私保護措施,保障用戶的隱私權(quán)。
基礎(chǔ)設(shè)施建設(shè)
V2X技術(shù)的廣泛應(yīng)用需要完善的基礎(chǔ)設(shè)施支持,包括路邊單元、通信網(wǎng)絡(luò)等。這需要大量的投資和時間進行建設(shè)和部署,尤其是在城市和高速公路等關(guān)鍵區(qū)域。
法規(guī)與標準
V2X技術(shù)的發(fā)展需要配套的法規(guī)和標準進行規(guī)范和指導,以確保技術(shù)的合法合規(guī)應(yīng)用。政府和行業(yè)需要合作制定相關(guān)的政策和標準,推動V2X技術(shù)的推廣和應(yīng)用。
人工智能與大數(shù)據(jù)的深度融合
人工智能和大數(shù)據(jù)技術(shù)將在未來自動駕駛技術(shù)的發(fā)展中扮演重要角色。通過大數(shù)據(jù)分析,可以優(yōu)化自動駕駛算法,提高系統(tǒng)的自適應(yīng)能力和學習能力。例如,通過分析大量的駕駛數(shù)據(jù),可以識別和預測交通流量變化,優(yōu)化路徑規(guī)劃算法,提高駕駛效率和安全性。
人工智能與大數(shù)據(jù)的技術(shù)構(gòu)成
1. 感知層
圖像處理與計算機視覺
自動駕駛車輛配備了多種傳感器,如攝像頭、激光雷達和雷達,捕捉周圍環(huán)境的視覺和深度信息。計算機視覺技術(shù)處理這些傳感器數(shù)據(jù),實現(xiàn)物體識別、道路標志識別、車道線檢測等功能。
傳感器融合
利用多傳感器數(shù)據(jù)融合技術(shù),結(jié)合激光雷達、攝像頭、雷達等多種傳感器的數(shù)據(jù),生成一個全面的環(huán)境感知圖。傳感器融合技術(shù)提高了感知精度和魯棒性,減少了單一傳感器的局限性。
2. 決策層
路徑規(guī)劃與運動控制
基于感知層提供的環(huán)境信息,自動駕駛系統(tǒng)需要進行路徑規(guī)劃和運動控制。AI算法如強化學習、優(yōu)化算法和模糊邏輯等,用于計算最優(yōu)行駛路徑,避開障礙物,調(diào)整速度和方向。
行為預測
AI技術(shù)通過分析歷史數(shù)據(jù)和當前環(huán)境信息,預測其他交通參與者(如行人、車輛)的行為。行為預測技術(shù)幫助自動駕駛車輛提前做出應(yīng)對策略,提高駕駛安全性。
3. 大數(shù)據(jù)平臺
數(shù)據(jù)采集與存儲
自動駕駛車輛在行駛過程中會生成大量數(shù)據(jù),包括傳感器數(shù)據(jù)、環(huán)境信息、行駛記錄等。這些數(shù)據(jù)通過大數(shù)據(jù)平臺進行采集、存儲和管理。高效的數(shù)據(jù)存儲和管理系統(tǒng)確保了數(shù)據(jù)的可用性和安全性。
數(shù)據(jù)處理與分析
大數(shù)據(jù)平臺利用分布式計算技術(shù)(如Hadoop、Spark)處理和分析海量數(shù)據(jù)。數(shù)據(jù)處理與分析技術(shù)幫助自動駕駛系統(tǒng)提取有價值的信息,優(yōu)化算法模型,提升系統(tǒng)性能。
4. 深度學習與模型訓練
模型訓練
深度學習算法(如卷積神經(jīng)網(wǎng)絡(luò)、循環(huán)神經(jīng)網(wǎng)絡(luò)、生成對抗網(wǎng)絡(luò)等)在自動駕駛中的應(yīng)用非常廣泛。基于大規(guī)模標注數(shù)據(jù)集,訓練AI模型以實現(xiàn)圖像分類、目標檢測、語義分割等功能。
模型優(yōu)化
通過大數(shù)據(jù)平臺進行模型優(yōu)化和調(diào)優(yōu),提高AI模型的精度和泛化能力。模型優(yōu)化過程包括超參數(shù)調(diào)整、架構(gòu)改進和訓練策略優(yōu)化等。
人工智能與大數(shù)據(jù)在自動駕駛中的應(yīng)用場景
1. 實時環(huán)境感知
AI與大數(shù)據(jù)結(jié)合,實現(xiàn)實時的環(huán)境感知和分析。自動駕駛車輛通過AI算法處理傳感器數(shù)據(jù),實時識別道路、障礙物、行人、車輛等,構(gòu)建高精度的環(huán)境模型,保障行駛安全。
2. 高精度地圖構(gòu)建與更新
利用大數(shù)據(jù)技術(shù),自動駕駛車輛可以采集和更新高精度地圖。高精度地圖提供了詳細的道路信息、交通標志、車道線等,輔助車輛進行精準導航和路徑規(guī)劃。通過AI技術(shù),自動化處理地圖數(shù)據(jù),實現(xiàn)高效的地圖更新和維護。
3. 自主決策與規(guī)劃
AI算法在自動駕駛決策和規(guī)劃中扮演關(guān)鍵角色。基于感知層數(shù)據(jù),AI模型可以自主進行路徑規(guī)劃、速度控制、避障決策等。大數(shù)據(jù)分析提供的歷史行駛數(shù)據(jù)和交通狀況信息,幫助優(yōu)化決策過程,提高駕駛效率和安全性。
4. 行為預測與風險評估
AI技術(shù)分析大數(shù)據(jù),預測其他交通參與者的行為和意圖。例如,通過深度學習模型,分析行人的行走軌跡和車輛的行駛軌跡,提前預判可能發(fā)生的危險情況。風險評估系統(tǒng)基于大數(shù)據(jù)分析結(jié)果,提供實時預警和應(yīng)對策略。
5. 車輛健康監(jiān)測與維護
大數(shù)據(jù)技術(shù)可以實時監(jiān)測車輛的運行狀態(tài)和性能數(shù)據(jù),利用AI算法進行故障預測和健康評估。基于預測結(jié)果,提前安排維護和保養(yǎng),減少車輛故障和停機時間,延長車輛使用壽命。
6. 用戶行為分析與個性化服務(wù)
通過AI與大數(shù)據(jù)技術(shù),分析用戶的駕駛行為和習慣,提供個性化的駕駛輔助和服務(wù)。例如,根據(jù)用戶的駕駛習慣調(diào)整駕駛模式,提供個性化的導航建議,提高用戶體驗和滿意度。
人工智能與大數(shù)據(jù)融合的優(yōu)勢
提高感知精度和魯棒性
多傳感器數(shù)據(jù)融合和深度學習技術(shù)顯著提高了環(huán)境感知的精度和魯棒性,確保自動駕駛系統(tǒng)在復雜環(huán)境中的可靠性和安全性。
優(yōu)化決策與規(guī)劃
AI算法結(jié)合大數(shù)據(jù)分析,優(yōu)化自動駕駛系統(tǒng)的決策和規(guī)劃能力,提高行駛效率,減少擁堵和能耗。
提升系統(tǒng)智能化水平
AI與大數(shù)據(jù)的深度融合,使自動駕駛系統(tǒng)具備自主學習和優(yōu)化能力,提升系統(tǒng)的智能化水平和自適應(yīng)能力。
降低維護成本
大數(shù)據(jù)分析與AI預測技術(shù)幫助車輛進行健康監(jiān)測和故障預測,提前安排維護,降低維護成本,提高車輛運營效率。
提供個性化服務(wù)
通過大數(shù)據(jù)分析用戶行為,提供個性化的駕駛輔助和服務(wù),提高用戶滿意度和駕駛體驗。
人工智能與大數(shù)據(jù)融合的挑戰(zhàn)
數(shù)據(jù)質(zhì)量與標注
高質(zhì)量的數(shù)據(jù)和精確的標注是訓練AI模型的基礎(chǔ)。如何獲取和管理高質(zhì)量的數(shù)據(jù),確保數(shù)據(jù)的準確性和多樣性,是一個重要挑戰(zhàn)。
計算資源與成本
AI模型訓練和大數(shù)據(jù)處理需要大量的計算資源和存儲資源。高效利用計算資源,降低計算成本,是自動駕駛技術(shù)發(fā)展中的關(guān)鍵問題。
系統(tǒng)復雜性與集成
AI與大數(shù)據(jù)的深度融合增加了系統(tǒng)的復雜性。如何高效集成多種技術(shù),保證系統(tǒng)的穩(wěn)定性和可靠性,是自動駕駛系統(tǒng)設(shè)計中的重要考慮。
數(shù)據(jù)隱私與安全
自動駕駛系統(tǒng)涉及大量的用戶數(shù)據(jù)和車輛數(shù)據(jù)。如何保護數(shù)據(jù)隱私,防止數(shù)據(jù)泄露和濫用,是自動駕駛技術(shù)面臨的重大挑戰(zhàn)。
法規(guī)與標準
AI與大數(shù)據(jù)技術(shù)在自動駕駛中的應(yīng)用需要配套的法規(guī)和標準進行規(guī)范。如何制定合理的法規(guī)和標準,確保技術(shù)的合法合規(guī)應(yīng)用,是一個重要的政策問題。
筆者觀點
智駕最前沿認為,自動駕駛技術(shù)的未來將是多傳感器融合與智能化的結(jié)合。純視覺方案的技術(shù)提升為自動駕駛技術(shù)的普及和成本下降做出了重要貢獻,但在實際應(yīng)用中,單一感知方式難以應(yīng)對所有復雜場景。因此,結(jié)合攝像頭、雷達、激光雷達等多種傳感器的數(shù)據(jù),仍舊是提高自動駕駛系統(tǒng)安全性和可靠性的關(guān)鍵。此外,V2X技術(shù)的發(fā)展將進一步增強自動駕駛系統(tǒng)的動態(tài)感知能力,通過實時數(shù)據(jù)共享,車輛可以更好地應(yīng)對復雜的交通狀況,提高行駛安全性和效率。人工智能和大數(shù)據(jù)技術(shù)的深度融合將為自動駕駛技術(shù)帶來更多創(chuàng)新和突破。通過不斷優(yōu)化算法和提升系統(tǒng)的自適應(yīng)能力,自動駕駛車輛將能夠在更多場景下實現(xiàn)自主駕駛。自動駕駛技術(shù)的發(fā)展經(jīng)歷了從多傳感器融合到純視覺方案的變革,未來的發(fā)展趨勢將是技術(shù)融合與智能化的結(jié)合。高精度地圖在自動駕駛中具有重要作用,但其高成本和維護難度限制了其普及。純視覺方案展示出了巨大的潛力,通過降低成本和提高系統(tǒng)的靈活性,推動了自動駕駛技術(shù)的發(fā)展。總而言之,自動駕駛技術(shù)未來將朝著更智能、更自主、更安全的方向發(fā)展。技術(shù)融合、多傳感器數(shù)據(jù)融合、實時數(shù)據(jù)共享將是未來的關(guān)鍵趨勢。在這一過程中,純視覺方案、高精度地圖和其他傳感器將共同發(fā)揮作用,共同推動自動駕駛技術(shù)的不斷進步,重感知是方向正確,而無地圖或僅為技術(shù)設(shè)想!
審核編輯 黃宇
-
傳感器
+關(guān)注
關(guān)注
2564文章
52722瀏覽量
764691 -
gps
+關(guān)注
關(guān)注
22文章
2972瀏覽量
168694 -
激光雷達
+關(guān)注
關(guān)注
971文章
4212瀏覽量
192249 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14245瀏覽量
169931
發(fā)布評論請先 登錄
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】視覺實現(xiàn)的基礎(chǔ)算法的應(yīng)用
海積信息推出高精度組合導航終端
康謀方案 | BEV感知技術(shù):多相機數(shù)據(jù)采集與高精度時間同步方案
UWB高精度定位技術(shù)在智能倉儲中的應(yīng)用
ads1278高速模式和高精度模式下所能得到的最高精度是多少?
舵機精度大揭秘:微米級控制,引領(lǐng)精準定位新時代
請問ADS7142的高精度模式(16bit)的實際精度是多少?
移遠通信推出全星系多頻段高精度定位定向GNSS模組LG580P,引領(lǐng)高精度導航新時代

移遠通信推出全星系多頻段高精度定位定向GNSS模組LG580P,引領(lǐng)高精度導航新時代

SC1641(AD7793)助力數(shù)字化時代的高精度測量解決方案
網(wǎng)絡(luò)研討會: Teledyne FLIR IIS Forge 5GigE高速高精度機器視覺工業(yè)相機

深度剖析在線長度測量儀:機器視覺引領(lǐng)高精度測量新時代
電化學感知技術(shù)的新時代

人形機器人感知系統(tǒng)的特點:多模態(tài)感知、高精度、實時性
鐳拓視覺激光焊接機:引領(lǐng)制造業(yè)的高精度革命






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論