") 基于DMD空間光調(diào)制器的單像素成像實(shí)驗(yàn)系統(tǒng)設(shè)計(jì)
基于DMD空間光調(diào)制器的單像素成像實(shí)驗(yàn)系統(tǒng)設(shè)計(jì)

實(shí)驗(yàn)介紹
單像素成像是指使用單點(diǎn)探測(cè)器(PD、PMT等)代替?zhèn)鹘y(tǒng)成像系統(tǒng)中的CCD或者CMOS陣列式感光元件來(lái)完成對(duì)物體透射或反射的光強(qiáng)的探測(cè)。由于單點(diǎn)探測(cè)器不具有空間分辨率,成像系統(tǒng)采用單臂測(cè)量時(shí),往往通過(guò)在不同種類的空間光調(diào)制器上加載一系列掩膜,使調(diào)制后的光代替贗熱光源照射至物體,然后從單點(diǎn)探測(cè)器獲得對(duì)應(yīng)于不同掩膜的一系列光強(qiáng)值來(lái)恢復(fù)物體的像。相比傳統(tǒng)成像系統(tǒng),單像素成像系統(tǒng)具有體積小、成本低、反應(yīng)靈敏等優(yōu)點(diǎn),不僅可以用于可見(jiàn)光波段成像,同時(shí)也可用于紅外、太赫茲等非可見(jiàn)光波段的成像。近年來(lái)單像素成像在穿過(guò)散射介質(zhì)成像以及水下成像中的應(yīng)用更顯示了其在生物醫(yī)學(xué)、軍事、超分辨等領(lǐng)域的巨大應(yīng)用潛力。
本實(shí)驗(yàn)系統(tǒng)光路器件如下圖。
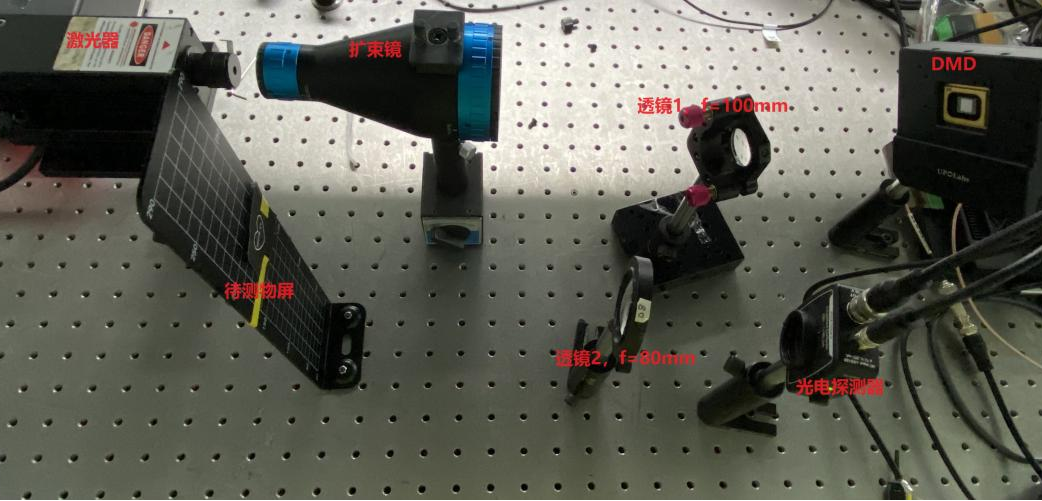
單像素成像實(shí)驗(yàn)光路圖
實(shí)驗(yàn)原理
單像素成像是一種新的計(jì)算成像方案,計(jì)算鬼成像(Computational Ghost Imaging,CGI)是單像素成像的理論基礎(chǔ)。計(jì)算鬼成像與傳統(tǒng)經(jīng)典雙臂鬼成像不同,計(jì)算鬼成像為單臂光路,僅需要一個(gè)桶探測(cè)器即可恢復(fù)物體的像。其過(guò)程是在空間光調(diào)制器(SLM)上加載相位或振幅隨機(jī)分布的像素,這樣光束在物體表面產(chǎn)生的散斑類似于熱光源的散斑,而且由于原來(lái)參考臂的散斑光場(chǎng)可以根據(jù)自由空間的衍射理論計(jì)算出來(lái),故參考臂及CCD被省去。直接由信號(hào)臂桶探測(cè)器的物光總光強(qiáng)值與計(jì)算的散斑分布進(jìn)行關(guān)聯(lián)就能夠恢復(fù)物體的像。計(jì)算鬼成像相對(duì)比傳統(tǒng)雙臂經(jīng)典鬼成像光路更為簡(jiǎn)單緊湊,而且投影到物平面的光場(chǎng)都是可人為調(diào)控的,所以可以依靠設(shè)計(jì)特殊散斑的方法來(lái)增加成像結(jié)果的對(duì)比度,提高信噪比,這些都是計(jì)算鬼成像對(duì)比于傳統(tǒng)鬼成像的優(yōu)勢(shì)。
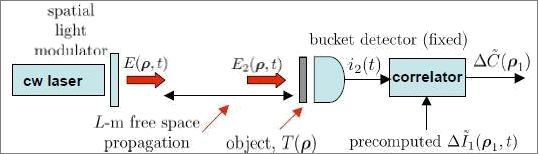
計(jì)算鬼成像示意圖
系統(tǒng)設(shè)計(jì)
DMD是一種新興的空間光調(diào)制器,DMD表面集成了成千上萬(wàn)個(gè)有規(guī)律地排布成一個(gè)陣列的正方形精密微小反射鏡片,每個(gè)微鏡片對(duì)應(yīng)一個(gè)像素。DMD光能利用率高,亮度、對(duì)比度出色,所有微鏡同步,調(diào)制的線性度高,并且響應(yīng)速度快,每秒可以達(dá)到上萬(wàn)次的翻轉(zhuǎn)。單像素成像實(shí)驗(yàn)是利用DMD加載參考圖(散斑圖),通過(guò)探測(cè)器獲取樣品的反射光強(qiáng)度,通過(guò)計(jì)算機(jī)的關(guān)聯(lián)計(jì)算獲取圖像的系統(tǒng)。
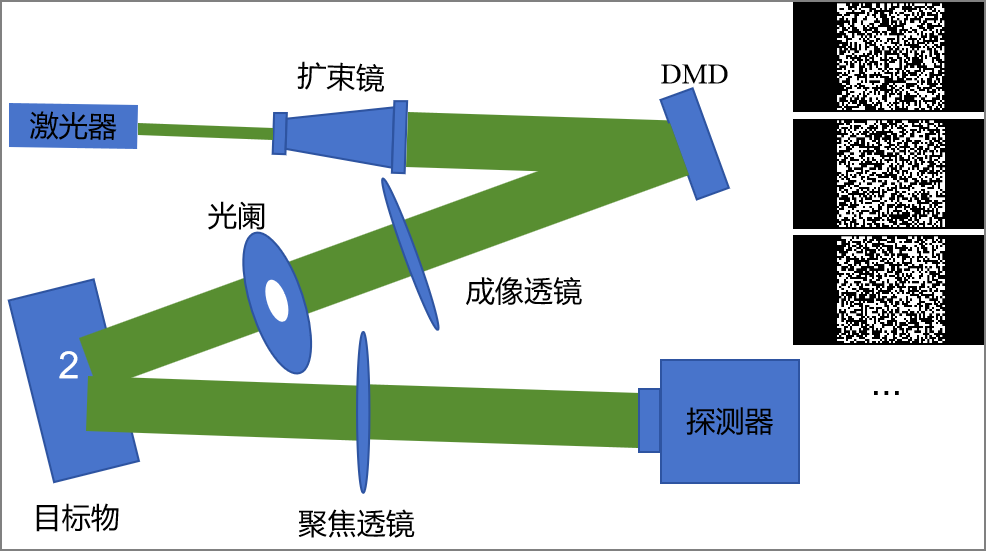
實(shí)驗(yàn)系統(tǒng)設(shè)計(jì)圖
DMD空間光調(diào)制器是核心器件,可以加載一系列的散斑圖,并將這些散斑圖按照設(shè)定的頻率進(jìn)行時(shí)序播放;
成像透鏡將DMD透射光散斑圖成像到目標(biāo)物上,根據(jù)成像關(guān)系,可以在目標(biāo)物上看到清晰的投影圖案;
聚焦透鏡和探測(cè)器是將目標(biāo)物散射的光接收并通過(guò)數(shù)據(jù)采集卡傳給電腦,作為強(qiáng)度數(shù)據(jù)量存儲(chǔ)下來(lái)。
系統(tǒng)功能
UPOLabs單像素成像實(shí)驗(yàn)系統(tǒng)利用DMD空間光調(diào)制器對(duì)目標(biāo)光場(chǎng)進(jìn)行編碼,利用單像素探測(cè)器采集編碼后的光場(chǎng)信息,通過(guò)經(jīng)典關(guān)聯(lián)計(jì)算算法、差分關(guān)聯(lián)算法、壓縮感知算法等不同算法重建出目標(biāo)場(chǎng)景圖像,該系統(tǒng)可供高校老師和相關(guān)科研人員進(jìn)行單像素成像實(shí)驗(yàn)教學(xué),同時(shí)也可在此系統(tǒng)基礎(chǔ)上開(kāi)展重建算法相關(guān)的科研工作。
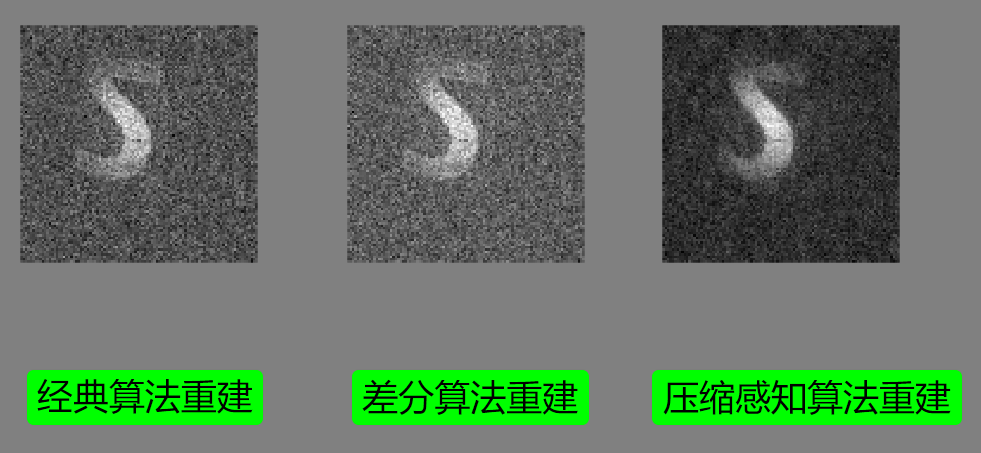
單像素成像重建結(jié)果
系統(tǒng)配置
(1)系統(tǒng)組成
該系統(tǒng)由軟件和硬件共同組成,軟件部分由三個(gè)獨(dú)立軟件構(gòu)成,硬件部分包括激光器光源、擴(kuò)束鏡、DMD空間光調(diào)制器、成像組件、聚焦組件、光闌組件、光電探測(cè)器、數(shù)據(jù)采集卡、目標(biāo)物組件等組成。
(2)技術(shù)指標(biāo)
DMD分辨率:1920*1080或1024*768,即編碼矩陣最大分辨率。
波段范圍:400nm-700nm(紅外可選)。
光場(chǎng)數(shù)據(jù)采集精度:16bit,0V-10V。
硬件接口:DMD與上位機(jī)軟件之間通過(guò)USB3.0接口進(jìn)行通信,數(shù)據(jù)采集卡與上位機(jī)之間通過(guò)USB2.0接口進(jìn)行通信,DMD與采集卡之間通過(guò)同軸電纜進(jìn)行硬觸發(fā)。
重構(gòu)圖像分辨率最高可達(dá)400*400,成像面積2cm*2cm。
(3)配置清單

-
探測(cè)器
+關(guān)注
關(guān)注
15文章
2706瀏覽量
74404 -
空間光調(diào)制器
+關(guān)注
關(guān)注
1文章
72瀏覽量
8954 -
成像系統(tǒng)
+關(guān)注
關(guān)注
2文章
205瀏覽量
14270
原文標(biāo)題:基于DMD空間光調(diào)制器的單像素成像實(shí)驗(yàn)系統(tǒng)
文章出處:【微信號(hào):UPOLabs,微信公眾號(hào):UPOLabs】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
空間光調(diào)制器的控制問(wèn)題
全面分析空間光調(diào)制器的多種作用
簡(jiǎn)略分析空間光調(diào)制器受限制的因素
空間光調(diào)制器,空間光調(diào)制器工作原理是什么?
空間光調(diào)制器(SLM),空間光調(diào)制器(SLM)是什么意思
空間光調(diào)制器怎么用_空間光調(diào)制器的功能及應(yīng)用
空間光調(diào)制器常見(jiàn)問(wèn)題及解決方法
液晶空間光調(diào)制器與數(shù)字微鏡器件的區(qū)別
液晶空間光調(diào)制器的應(yīng)用介紹
空間光調(diào)制器與生物醫(yī)學(xué)儀器的關(guān)系
液晶空間光調(diào)制器的原理和應(yīng)用
液晶空間光調(diào)制器原理及公式
HDSLM DMD空間光調(diào)制器Smart系列的主要功能






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論