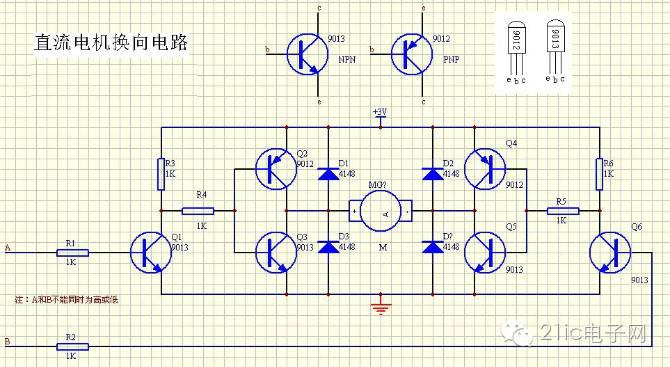
 h橋驅動電路使電機正反轉原理
h橋驅動電路使電機正反轉原理
H橋驅動電路使電機正反轉的原理是一個在電子和電機控制領域廣泛應用的基礎知識。
一、H橋驅動電路概述
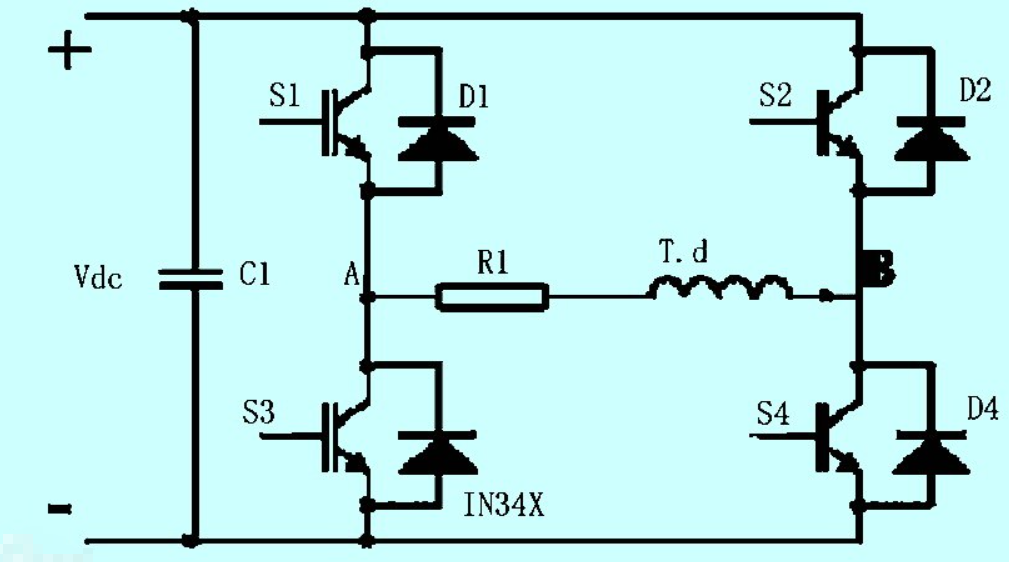
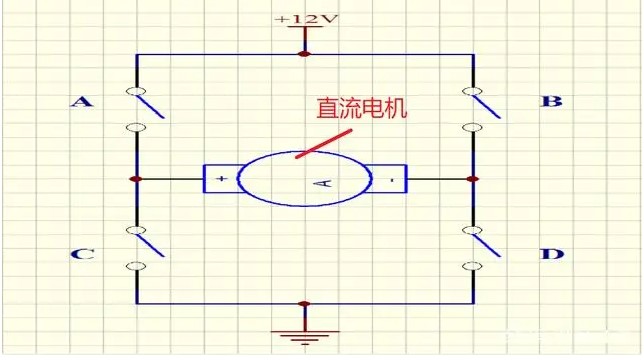
H橋驅動電路是一種用于控制直流電機正反轉及速度的電路,其名稱來源于其電路結構類似于字母“H”。該電路通常由四個開關元件(如晶體管、MOSFET等)組成,這些開關元件被配置成可以控制電機兩端電流的方向,從而實現電機的正反轉。
二、H橋電路的基本結構
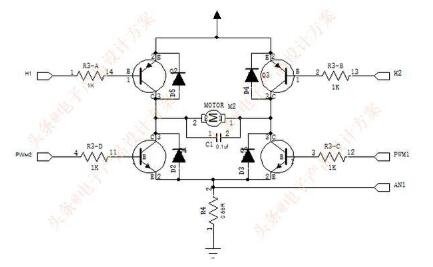
H橋電路的基本結構包含四個開關元件,通常標記為Q1、Q2、Q3和Q4,它們圍繞電機兩側配置,形成兩個“橋臂”。電機則連接在這兩個橋臂之間,成為“橋”的橫杠。具體結構如下:
- 橋臂1 :由Q1和Q2組成,連接電機的一端與電源的正負極。
- 橋臂2 :由Q3和Q4組成,連接電機的另一端與電源的正負極。
此外,為了保護電路中的開關元件免受電機反電動勢的影響,通常還會在每個開關元件旁邊并聯一個續流二極管(如D1、D2、D3、D4)。
由于電動閥的線圈呈現感性。當正向或者反向驅動信號斷開時,流過線圈的電流不能突變。
在線圈兩端會產生與驅動信號反相的反向電動勢。
一般的做法是在閥門的線圈兩端并聯雙向TVS,或者兩個反向串聯穩壓二極管。
在正反兩個方向吸收瞬時大脈沖功率,并把反向電動勢鉗位到一定的電壓。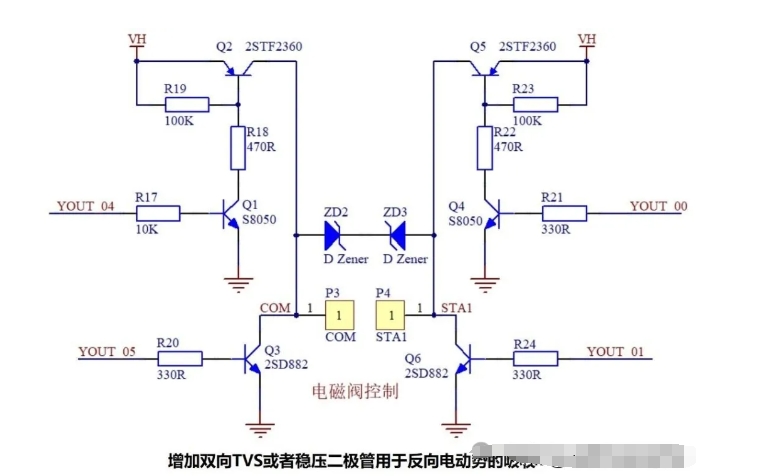
雙向TVS或者反向串聯穩壓二極管吸收反向電動勢
還有一種辦法是通過并聯在上下橋臂驅動管兩端的二極管構成續流通路,以降低反向電動勢的幅度。
如果驅動管為MOS管,則內部體寄生二極管可用于提供續流通路。
YOUT_04, YOUT_01驅動高電平,YOUT_00, YOUT_05輸出低電平。
Q1,Q6導通,電流的流向為,
VH->Q1的E極->Q1的C極->閥門線圈->Q6的C極->Q6的E極->參考地。
在電流的驅動下,閥門被打開。
正向輸出的的電流流向
斷開驅動信號時,下橋臂YOUT_01首先輸出低電平,關斷下橋臂。
延時一段時間,大概50ms之后,上橋臂YOUT_04再輸出低電平,關斷上橋臂。
在這段延時時間內,流過閥門線圈的電流并不會立即切斷,而是形成了
VH->Q1的E極->Q1的C極->閥門線圈->二極管D8->VH的續流通路。
三、H橋驅動電機正反轉的原理
1. 正轉模式
當需要電機正向轉動時,控制信號使Q1和Q4導通(即閉合),同時Q2和Q3斷開(即打開)。此時,電流從電源的正極經過Q1流向電機的一端,再從電機的另一端經過Q4流回電源的負極,形成正向電流。根據安培定則(即電流在磁場中受力的方向與電流方向和磁場方向都垂直,且滿足左手定則),電機內部的磁場與電流方向相同,從而驅動電機按照預定的方向旋轉。
2. 反轉模式
當需要電機反向轉動時,控制信號使Q2和Q3導通,同時Q1和Q4斷開。此時,電流從電源的正極經過Q2流向電機的另一端,再從電機的一端經過Q3流回電源的負極,形成反向電流。同樣根據安培定則,電機內部的磁場與電流方向相反,從而驅動電機反向旋轉。
四、H橋電路的調速與制動
1. 調速
H橋電路還可以通過調整開關元件的通斷時間(即占空比)來實現電機的調速。這通常通過脈寬調制(PWM)信號來實現。PWM信號是一種在固定周期內改變高電平持續時間的信號,其占空比(即高電平時間占總周期的比例)決定了平均電壓的大小。當PWM信號控制H橋電路時,通過改變PWM信號的占空比可以改變電機兩端的平均電壓,進而改變電機的轉速。占空比越大,平均電壓越高,電機轉速越快;占空比越小,平均電壓越低,電機轉速越慢。
2. 制動
當需要電機快速停止時,可以通過關閉所有開關元件(即Q1、Q2、Q3和Q4都斷開)來切斷電機兩端的電流。此時,電機內部的磁場迅速消失,電機將迅速停止轉動。另外,也可以通過使對角線上的兩個開關元件(如Q1和Q3或Q2和Q4)同時導通,將電機兩端短路,形成電機制動狀態,使電機迅速停止轉動。這種制動方式稱為動態制動或回饋制動。
五、H橋電路的特點與應用
1. 特點
- 雙向控制 :H橋電路能夠控制電機電流的方向,從而實現電機的正反轉。
- 調速方便 :通過PWM信號控制開關元件的通斷時間,可以方便地實現電機的調速。
- 制動靈活 :支持多種制動方式,包括自由停車、動態制動等。
- 保護電路 :通過并聯續流二極管等元件,可以保護電路中的開關元件免受電機反電動勢的影響。
2. 應用
H橋驅動電路廣泛應用于需要控制直流電機正反轉及速度的場合,如機器人、汽車、飛行器等領域。在機器人技術中,H橋電路常用于控制機器人的關節運動;在汽車領域,H橋電路可用于控制電動汽車的驅動電機;在飛行器中,H橋電路則可用于控制螺旋槳的旋轉方向和速度。
六、結論
H橋驅動電路是一種簡單而有效的電路,它通過控制電機兩端電流的方向來實現電機的正反轉及調速。該電路具有雙向控制、調速方便、制動靈活等特點,并廣泛應用于各種需要控制直流電機運動的場合。隨著電子技術的不斷發展,H橋驅動電路的性能也將不斷提升,為電機控制領域帶來更多的便利和創新。
-
電機
+關注
關注
143文章
9194瀏覽量
147636 -
正反轉
+關注
關注
2文章
129瀏覽量
18543 -
開關元件
+關注
關注
2文章
67瀏覽量
10228 -
H橋驅動電路
+關注
關注
0文章
7瀏覽量
1587
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論