") 研究人員利用機器甲殼蟲來應(yīng)對實際生活中的應(yīng)用
研究人員利用機器甲殼蟲來應(yīng)對實際生活中的應(yīng)用

近些年來,許多機器人都在忙著從動物身上取經(jīng),學(xué)習(xí)它們的敏捷、高效和各種技能。從某些能力上來看,有些機器人已經(jīng)快追上動物了,不過我們依然在追逐完美的道路上不斷前行。
研發(fā)人員有時會在機器人的設(shè)計中用到生物學(xué)(如許多長得像動物的仿生機器人),不過他們還有一種更直接的方式,那就是直接以生物為基礎(chǔ)打造機器人。此前,我們就見識過在類似指導(dǎo)原則下打造的飛行昆蟲(半機器半昆蟲),但今天這款來自新加坡南洋理工大學(xué)(Nanyang Technological University,簡稱NTU)的機器甲殼蟲則更加炫酷,它不但是世界上最小的機器昆蟲,也是市面上可控性最強的產(chǎn)品。
以下是由Hirotaka Sato教授領(lǐng)導(dǎo)的新加坡研究人員在最近一篇論文中描述的他們的工作:
可以使用活昆蟲作為開發(fā)活昆蟲混合機器人的平臺。這樣的混合體保留了昆蟲的剛性外骨骼、柔性關(guān)節(jié)和柔性致動器的復(fù)雜結(jié)構(gòu),以及昆蟲的運動能力,同時具有高可控性和低功耗的特點。這種昆蟲機器混合動力機器人是由一個活著的昆蟲平臺制成的,其上裝有一個小型化的電子裝置來控制它。通過將昆蟲本身作為機器人,研究人員繞過了設(shè)計和制造機器人身體的復(fù)雜過程,使用昆蟲的肌肉系統(tǒng)作為軟驅(qū)動器和柔性關(guān)節(jié)以及作為控制系統(tǒng)的一部分的神經(jīng)系統(tǒng)。
這種特殊的甲殼蟲是一種黑暗的甲殼蟲。它很小(2到2.5厘米),重量輕(約0.5克),并且能夠存活三個月左右,這對于一個小蟲子來說是很長的時間了。電子背包與甲殼蟲的觸角接觸,當(dāng)天線受到電脈沖的刺激時,它激活了甲殼蟲的內(nèi)置逃生機制,使它陷入了認(rèn)為它正在進入某種東西并使其轉(zhuǎn)向的東西。
這樣做的好處(與直接的神經(jīng)或肌肉刺激相反,研究人員也試驗過),甲殼蟲的大腦仍然負(fù)責(zé)控制其四肢,以便對高級別的控制作出反應(yīng)自適應(yīng)步態(tài)等,使運動更簡單的問題來解決。只有兩個紐扣電池,因此人類最多控制機器甲殼蟲 8 小時,不過這也夠它跑上整整一公里了。
使用這些方法來有效地控制昆蟲的關(guān)鍵是對天線刺激的響應(yīng)不能是二元的,因為你最終會得到一個通常太粗糙而無用的控制水平。通過改變刺激的頻率,研究人員能夠調(diào)節(jié)昆蟲的轉(zhuǎn)動速度:增加刺激頻率也增加了昆蟲的轉(zhuǎn)動速度,成功率超過85%。有趣的是,如果同時刺激兩根觸須,甲殼蟲就會倒退。
欲了解更多細節(jié),IEEE Spectrum與Tat Thang Vo Doan進行了交談,他是第一位在《軟機器人》期刊上發(fā)表的關(guān)于這種控制論昆蟲的論文。
IEEE科技縱覽:您的生物機器人與過去曾經(jīng)見過的其他控制生物學(xué)的昆蟲有什么不同?如蟑螂、蜻蜓和大型甲殼蟲等?
Tat Thang Vo Doan:電刺激通常用于蟑螂、巨型甲殼蟲和蛾等電子人昆蟲的神經(jīng)肌肉刺激。還有其他一些小組正在研究天線刺激,但是他們無法對昆蟲的反應(yīng)進行評分,這對開發(fā)一個精確的閉環(huán)控制系統(tǒng)使得機器人蟲自主工作非常重要。
我們的巨型機器人甲殼蟲主要依靠對飛行控制的直接飛行肌肉的神經(jīng)肌肉刺激和用于步行控制的前腿的腿部肌肉。理想情況下,刺激肌肉會更精確,因為我們可以完美地控制個人腿部,但是在植入和計算中花費更多,以計劃和刺激所有個體肌肉進行步行。天線的刺激比刺激所有的肌肉更簡單,更容易,因此可以幫助我們簡化硬件和控制系統(tǒng)。希望在不久的將來,我們可以像任何其他人造電機一樣精確地控制電子人甲殼蟲。
與Draper的DragonflEye項目相比如何?
基于光神經(jīng)刺激的機器人蜻蜓是曾經(jīng)證明的最小的機器人昆蟲。雖然光遺傳學(xué)是一個熱門技術(shù),但它需要基因修飾。目前,我們不確定光遺傳學(xué)是否能夠精確控制昆蟲的運動,因為沒有太多的信息被發(fā)布。但是,我們希望電子人蜻蜓能夠很好地工作,并且能夠與其他電子人昆蟲進行合作,進行未來的搜索和救援行動。
我們相信沒有完美的機器人蟲子他們每個人都有自己的優(yōu)點和缺點。我們最好將它們一起用于協(xié)同救援行動,以盡可能提高效率。
你為什么決定使用這種特殊的昆蟲?
我們使用Zophobas甲殼蟲來開發(fā)這個機器人的昆蟲,因為它的小尺寸(2-2.5厘米)將幫助它在災(zāi)難地點輕松訪問小瓦礫系統(tǒng),在蟑螂和巨型甲殼蟲無法進入的災(zāi)難地點。此外,一群飛行而行走的各種規(guī)模的機器人昆蟲會增加覆蓋范圍,縮短搜索時間,從而提高搜救行動的效率和準(zhǔn)確性。
這些昆蟲能夠攜帶傳感器嗎? 在災(zāi)難情況下他們將如何被控制?
對于步行機器人的昆蟲,我們能夠?qū)⑼獠總鞲衅骷傻奖嘲校驗槔ハx能夠承載高達其兩倍的重量。 我們正在開發(fā)一款集成了人體檢測和導(dǎo)航傳感器的背包。 這將有助于我們在災(zāi)難地點使用電子人昆蟲時發(fā)現(xiàn)受害者,并使電子人昆蟲自主工作。
對于一個災(zāi)難的情況,我們可以釋放數(shù)以百計的飛行和爬行機器人昆蟲的網(wǎng)站,一旦大規(guī)模生產(chǎn)一個機器人昆蟲的價格將微不足道。昆蟲可以自由移動進入倒塌的結(jié)構(gòu),并發(fā)回他們的位置和環(huán)境條件的地圖,使救援隊可以有效地計劃他們的行動方式和地點,他們應(yīng)該訪問。一旦昆蟲檢測到受害者,就會向救援隊發(fā)出警報,切換到自主控制模式,在受害者身邊移動進行確認(rèn),并建立更清晰的周邊環(huán)境地圖。在營救行動結(jié)束時,所有的昆蟲都會自動返回到控制基地。我知道這聽起來像科幻小說,但我們實際上正在努力實現(xiàn)它。
你覺得這些生活機器人何時會對實際的實際應(yīng)用有用?
根據(jù)目前人造板蟲的進展情況,我認(rèn)為在5年內(nèi)我們將能夠使用人造板蟲進行一些實際的應(yīng)用。當(dāng)然,我不是指搜救任務(wù),因為我們需要更多的時間。
你接下來做什么?
我們現(xiàn)在正在打造一套反饋控制系統(tǒng),它是精確控制昆蟲動作的可靠性保證。此外,我們還在為“背包”整合導(dǎo)航系統(tǒng)與環(huán)境傳感器,未來機器昆蟲也能像自動駕駛汽車一樣完成任務(wù)。
對于真正的應(yīng)用,我們需要維持電子人的昆蟲(主要是電子背包)的電源供應(yīng),如果我們依靠電池,目前這是一個巨大的挑戰(zhàn)。 因此,我們正在開發(fā)一種生物燃料電池,它能夠?qū)⒗ハx內(nèi)部的生物燃料轉(zhuǎn)換為電流來運行控制背包。 這將有助于保持長期使用的背包電源。
-
仿生機器人
+關(guān)注
關(guān)注
1文章
75瀏覽量
15601
原文標(biāo)題:研究人員利用活體甲殼蟲 打造搜救機器人
文章出處:【微信號:IEEE_China,微信公眾號:IEEE電氣電子工程師】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
無刷直流電機雙閉環(huán)串級控制系統(tǒng)仿真研究
超聲波測距換能器:工業(yè)與生活中的測量利器
簡儀科技128通道水聲信號模擬器解決方案

借助NVIDIA技術(shù)提升機器人的移動和全身控制能力

研究人員開發(fā)出基于NVIDIA技術(shù)的AI模型用于檢測瘧疾
地平線與蔚來首款合作車型——firefly螢火蟲正式上市!
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
蔚來發(fā)布第三品牌“firefly 螢火蟲”
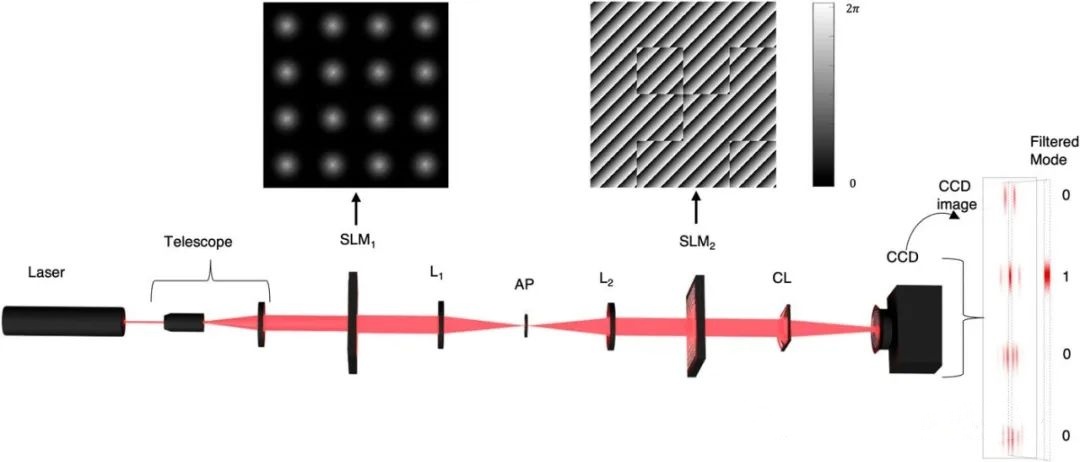
研究人員利用激光束開創(chuàng)量子計算新局面
蔚來螢火蟲品牌計劃明年出海
藍牙人員定位在化工廠實際應(yīng)用效果
NVIDIA與學(xué)術(shù)研究人員聯(lián)合開發(fā)手術(shù)機器人
UWB人員定位解決方案在工廠中的實際應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論