 C-V2X聯合RTK技術的場景仿真方案
C-V2X聯合RTK技術的場景仿真方案
《中華人民共和國國民經濟和社會發展第十四個五年規劃和 2035年遠景目標綱要》提出:
積極穩妥發展工業互聯網和車聯網”。車聯網與智能網聯汽車、智慧交通、智慧城市建設緊密相關。如今,伴隨蜂窩車聯網(CellularV2X,C-V2X)產業發展進入新階段,規模應用與商業部署將成為行業主旋律,賦能我國汽車產業從新能源汽車的上半場轉移到智能網聯汽車的下半場,并從全球競爭中勝出。
伴隨著我們車輛網事業的蓬勃發展,C-V2X場景測試也在如火如荼的進行中,但是我相信做過c-V2X場景測試的小伙伴一定遇到過一個很頭痛的問題:傳統的GNSS定位精度無法滿足C-V2X場景中厘米級導航定位的需求,因為傳統的GNSS 定位誤差在實際生活中可能要超過半米,甚至是1米,這樣導致的最直接的結果就是在場景里因為定位誤差太大導致算法無法驗證,無法進一步后續的測試,行業迫切需要引入高精定位技術。
那么問題來了?
在C-V2X的場景仿真測試中,我們如何來引入高精定位技術呢?首先我們先來了解一下高精定位技術RIK。
什么是RTK?
RTK(Real?Time?Kinematic)實時動態測量技術,是以載波相位觀測為根據的實時差分GPS(RTDGPS)技術,它是測量技術發展里程中的一個突破,它由基準站接收機、數據鏈、流動站接收機三部分組成。在基準站上安置1臺接收機為參考站,對衛星進行連續觀測,并將其觀測數據和測站信息,通過無線電傳輸設備,實時地發送給流動站,流動站GPS接收機在接收GPS衛星信號的同時,通過無線接收設備,接收基準站傳輸的數據,然后根據相對定位的原理,實時解算出流動站的三維坐標及其精度(即基準站和流動站坐標差△X、△Y、△H,加上基準坐標得到的每個點的WGS-84坐標,通過坐標轉換參數得出流動站每個點的平面坐標X、Y和海拔高H)。
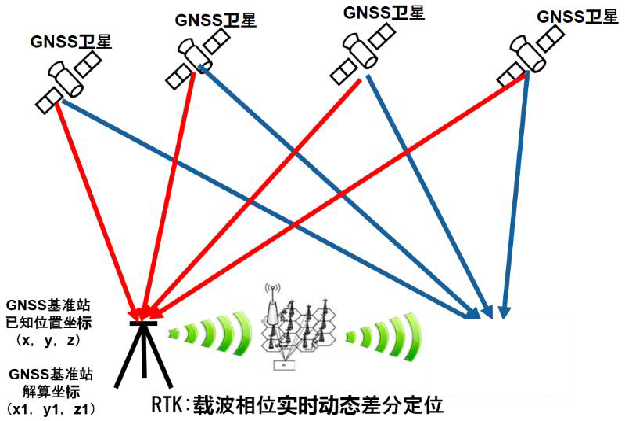
從RTK 的工作原理介紹,我們可以看到RTK 定位是需要無線通訊技術參與進來的,通過LTE/5G 或Wifi 執行從基站到流動站的數據傳輸。一種常用的方法是“通過Internet協議的RTCM 網絡傳輸”(NTRIP)。因此,基站通過NTRIP服務器將其數據提供給所謂的NTRIP Caster。流動站獲取RTK GNSS 定位所需的數據是通過NTRIP 客戶端從NTRIP Caster 收集的。
在RTK作業模式下,基準站通過數據鏈將其觀測值和測站坐標信息一起傳送給流動站。流動站不僅通過數據鏈接收來自基準站的數據,還要采集GPS觀測數據,并在系統內組成差分觀測值進行實時處理,同時給出厘米級定位結果,歷時不足一秒鐘。流動站可處于靜止狀態,也可處于運動狀態;可在固定點上先進行初始化后再進入動態作業,也可在動態條件下直接開機,并在動態環境下完成整周模糊度的搜索求解。
既然RTK是這么強大的一種定位技術,那我們何不把它融入到C-V2X 場景仿真測試中呢?羅德與施瓦茨公司就是世界上兼具蜂窩網絡仿真和衛星定位仿真能力為一體的少數幾家公司之一,接下來小伙伴跟隨我一起看看羅德與施瓦茨是如何把這兩大武功派系融為一體的吧。
RTK如向助力V2X?
眾所周知,羅德與施瓦茨在蜂窩通訊仿真領域一直是行業翹楚,在衛星仿真測試產品上也處于業界領先地位,自家兩大拳頭產品 C-V2X 加持 RTK 高精定位方案正是羅德與施瓦茨產品強強聯合的優秀結晶,也預示這該解決方案可以完美解決行業痛點問題,同時也是作為行業頭部企業一種責無旁貸的義務。
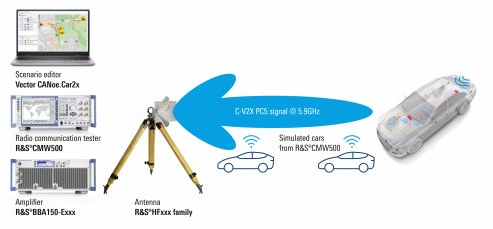
首先我們來看一下該方案的邏輯示意圖, 讓各位小伙伴先有一個大概的印象。
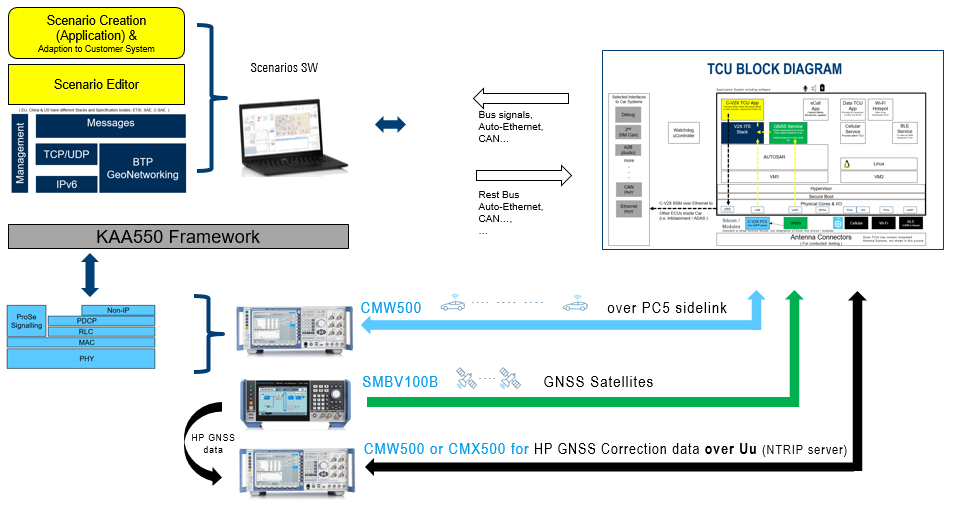
▲仿真系統拓撲圖
系統組成
從上圖可以看出, 整個仿真系統需要用到兩臺綜測儀CMW500,一臺衛星信號仿真器SMBV100B 以及C-V2X場景測試需要的軟件。因此羅德與施瓦茨的V2X聯合RTK仿真有三臺儀表組成, 這三臺儀表的分工如下:一臺CMW500 或者CMX500仿真4G 或者5G 基站, 另外一臺CMW500仿真 C-V2X信號, SMBV100B仿真衛星信號和RTK仿真。所有這些儀表和場景軟件PC都通過網線連接到同一個路由器上, 所有設備的IP 地址均在同一個網段。
系統工作原理如下:
SMBV100B產生 GNSS 信號和RTK仿真,提供NTRIP 數據仿真。
被測設備首先通過GNSS天線和SMBV100B進行時間同步。之后被測設備開始進入到PC5 工作模式。
被測設備通過UU口接入到CMW500 或者CMX500, 同時獲取CMW500或者CMX500分配的IP地址,被測設備通過這個IP 地址去訪問SMBV100B產生的RTCM3.3 差分數據,進行RTK 定位。
場景軟件開始運行, 控制CMW500 C-V2X 產生PC5 信號, 與被測件進行PC5消息通訊。
運行相關的需要車道級導航或者高精定位的場景,驗證場景的算法和決策可以進行厘米級的定位測試需求。
測試界面:
下圖是SMBV100B仿真的NTRIP server 和差分數據:
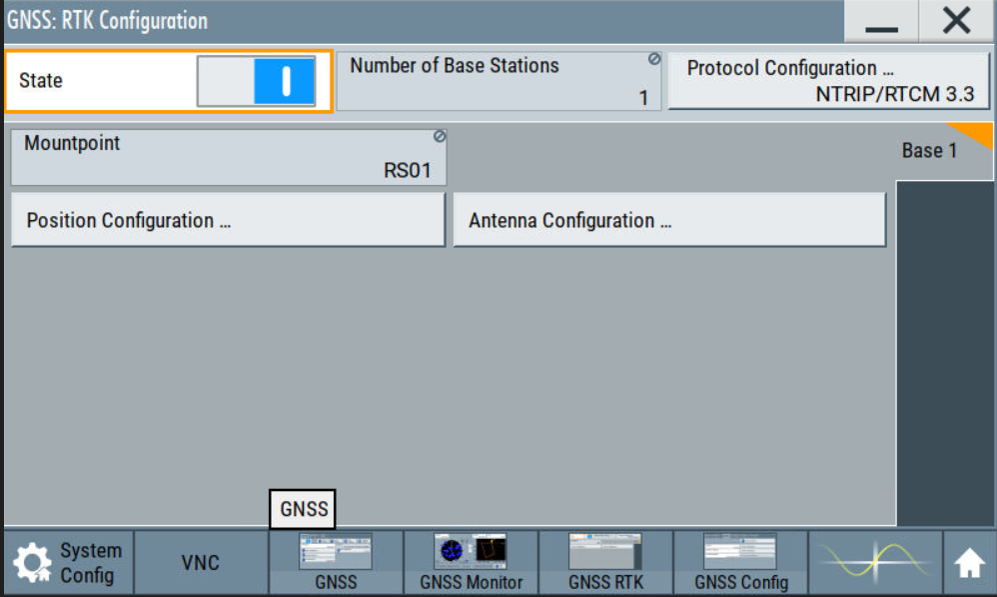
▲NTRIP 服務器仿真示意圖
下圖是CMW500 的DAU 功能給TBOX 提供的可以進行網絡連接的IP 地址。
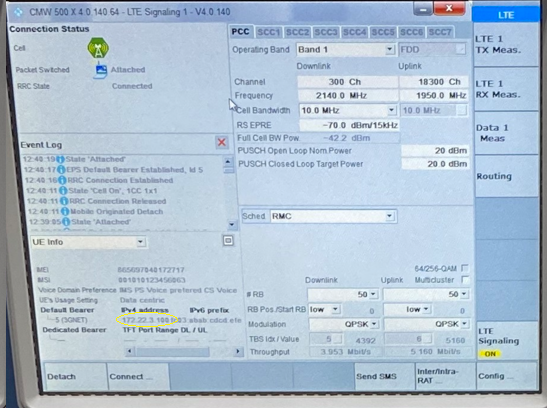
▲基站仿真示意圖
下圖表示 TBOX 通過這個IP 地址連接到SMBV100B仿真的NTRIP server獲取差分數據,成功進行RTK高精定位。
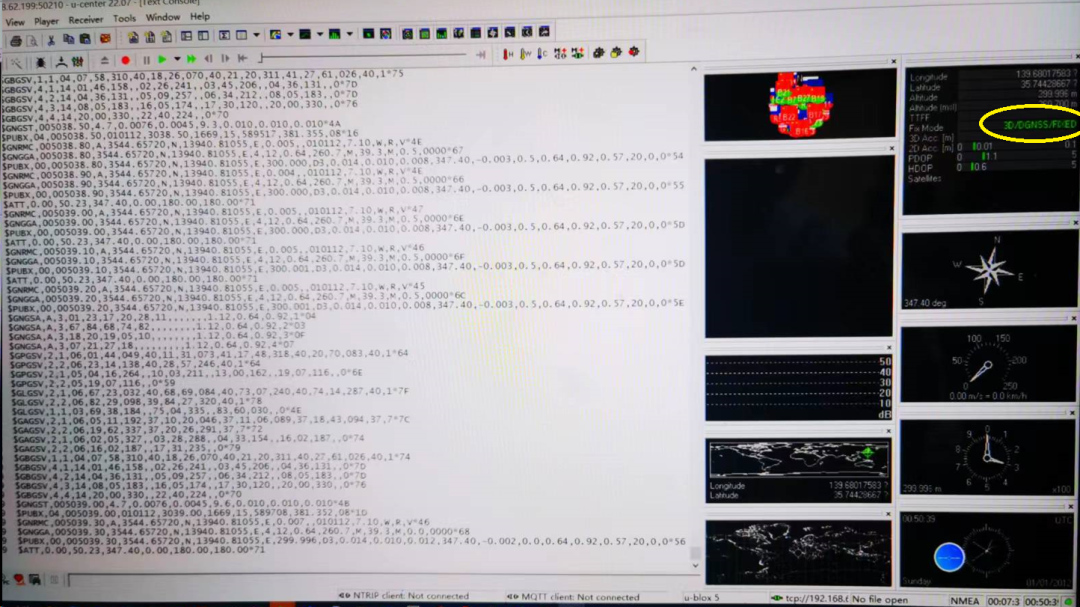
▲RTK定位成功示意圖
下圖表示TBOX 已經和一輛由第二臺CMW500 仿真的支持V2X 功能的車輛進行通訊成功!
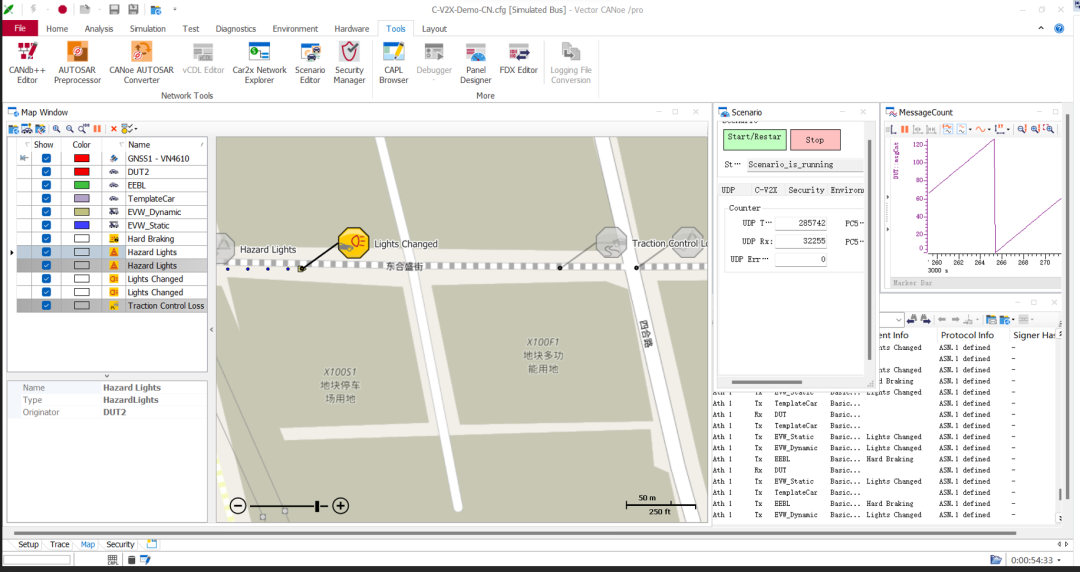
▲場景仿真示意圖
這個方案,首先利用了羅德與施瓦茨綜測儀的單臺儀表可以全覆蓋的能力,不僅僅可以覆蓋GSM, WCDMA, LTE,還可以覆蓋 C-C2X技術。
其次, 充分利用了內置數據處理單元的優勢,通過被測件注冊到CMW500從而獲取可以接入到SMBV100B的IP地址, 進而獲取RTCM差分數據,實現RTK 高精定位。
各位小伙伴看到這里,是不是有種似曾相識的感覺?對,其實這一步是仿真了目前國內的千尋的工作模式,我們的技術無時無刻不在!!
最后, CMW500 C-V2X仿真是提供一個API接口給到V2X上層仿真軟件,這個接口可以對接任何V2X場景軟件,包括但是不限于Vector,Prescan,VTD, Carmaker等等任何場景軟件。
結語
各位小伙伴, 想想這么強大的V2X加上RTK聯合仿真測試解決方案, 您不動心嗎?
好了,今天關于C-V2X聯合RTK技術的場景仿真方案介紹, 就給各位小伙伴介紹到這兒, 對方案感興趣的小伙伴歡迎訂閱下載轉發, 好的東西記得分享哦!
羅德與施瓦茨業務涵蓋測試測量、技術系統、網絡與網絡安全,致力于打造一個更加安全、互聯的世界。成立90 年來,羅德與施瓦茨作為全球科技集團,通過發展尖端技術,不斷突破技術界限。公司領先的產品和解決方案賦能眾多行業客戶,助其獲得數字技術領導力。羅德與施瓦茨總部位于德國慕尼黑,作為一家私有企業,公司在全球范圍內獨立、長期、可持續地開展業務。
-
定位技術
+關注
關注
7文章
298瀏覽量
25662 -
RTK
+關注
關注
8文章
139瀏覽量
37849 -
自動駕駛
+關注
關注
788文章
14085瀏覽量
168501 -
V2X
+關注
關注
25文章
212瀏覽量
43923 -
智能網聯汽車
+關注
關注
9文章
1123瀏覽量
31359
原文標題:【行業方案】|V2X結合RTK,雙劍合璧助力自動駕駛
文章出處:【微信號:羅德與施瓦茨中國,微信公眾號:羅德與施瓦茨中國】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
C-V2X 技術介紹 精選資料推薦
5分鐘成為車聯網專家|如何實現C-V2X技術突破把住車聯網發展命門 精選資料分享
Qualcomm和汽車廠商推動C-V2X商用 PSA與高通宣布C-V2X測試取得進展

分析MEC與C-V2X融合應用場景
中興通訊成功驗證了C-V2X通信安全技術解決方案
R16為C-V2X提供清晰的演進路徑
簡單認識C-V2X
從實驗室到試驗場:羅德與施瓦茨攜手奧迪進行C-V2X道路交通場景測試
大話中國C-V2X通訊標準應用層標準
C-V2X仿真測試之虛擬場景設計





 工商網監
工商網監
評論