") LD2410S測(cè)試、接線和常見問題一文詳解
LD2410S測(cè)試、接線和常見問題一文詳解

HLK-LD2410S是海凌科推出的一款爆款24G雷達(dá)模塊,不僅保持了高精準(zhǔn)識(shí)別人體運(yùn)動(dòng)狀態(tài)的能力,而且將超低功耗的特性發(fā)揮到了極致,迎合了當(dāng)今社會(huì)節(jié)能環(huán)保的主流趨勢(shì),也滿足了客戶對(duì)低功耗、環(huán)保型產(chǎn)品的迫切需求。本文主要講解這款模塊如何使用,以及在使用過程中遇到問題如何解決?
一.LD2410S接線教程
1.引腳接線對(duì)應(yīng)圖

2.引腳接線示意圖
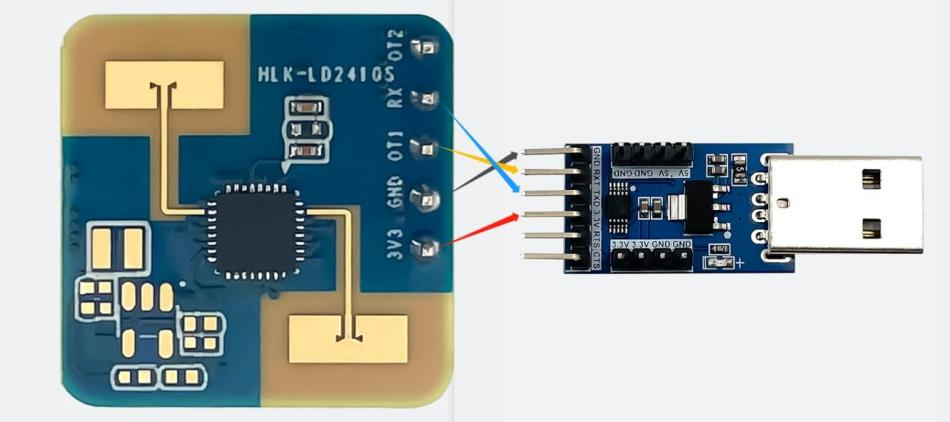
OT2定義為OUT輸出腳,可不接。
二.LD2410S模塊測(cè)試教程
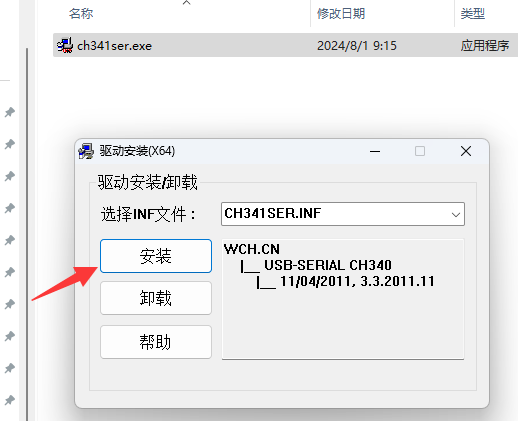
2.1.安裝驅(qū)動(dòng)文件
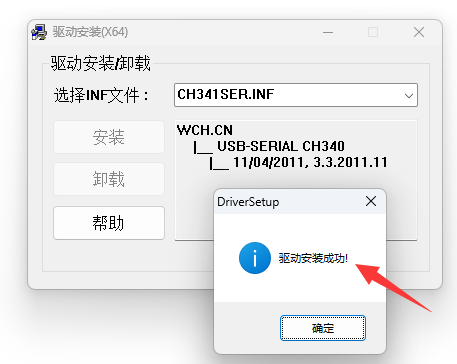
(1)打開驅(qū)動(dòng)文件,點(diǎn)擊安裝,安裝完成后顯示驅(qū)動(dòng)安裝完成。
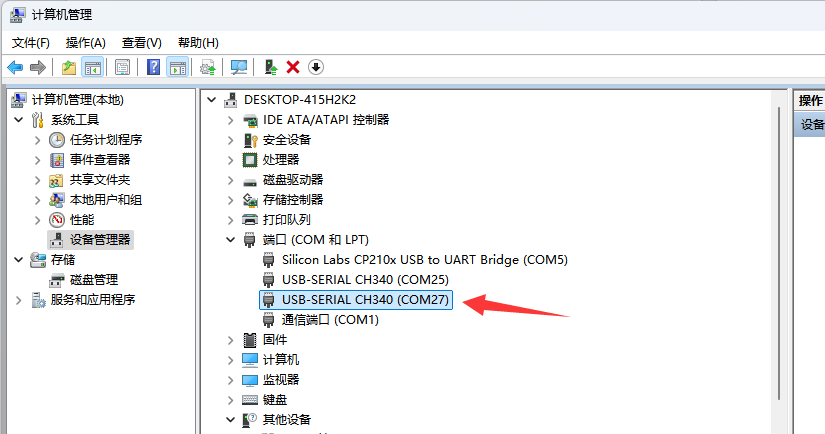
(2)安裝好驅(qū)動(dòng)后,接入線,可以看到設(shè)備管理的端口如下圖所示。
2.1.引腳接線示意圖
(1) 默認(rèn)上報(bào)數(shù)據(jù)
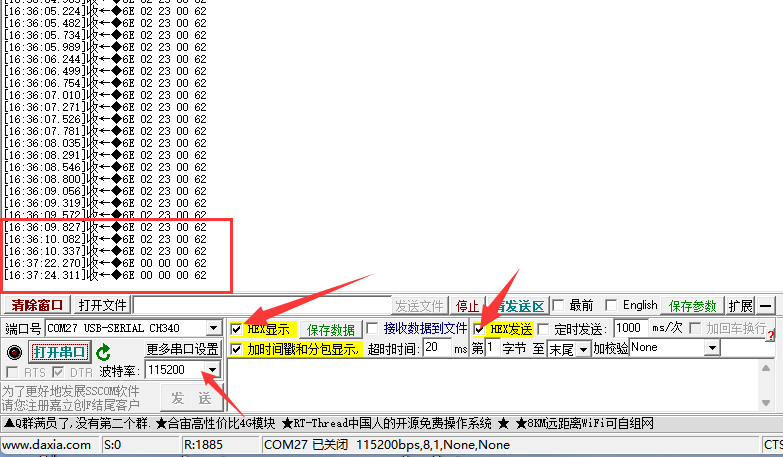
2410S的串口默認(rèn)波特率為 115200,1 停止位,無奇偶校驗(yàn)位,默認(rèn)上報(bào)數(shù)據(jù)如下圖所示,數(shù)據(jù)采用小端格式,距離為0023,切換成十進(jìn)制為35.
[1610.082]收←◆6E 02 23 00 62
幀頭:6E 目標(biāo)狀態(tài):02(有人)目標(biāo)距離:23 00(35cm)幀尾:62
[1622.270]收←◆6E 00 00 00 62
幀頭:6E 目標(biāo)狀態(tài):00(無人)目標(biāo)距離:23 00(35cm)幀尾:62
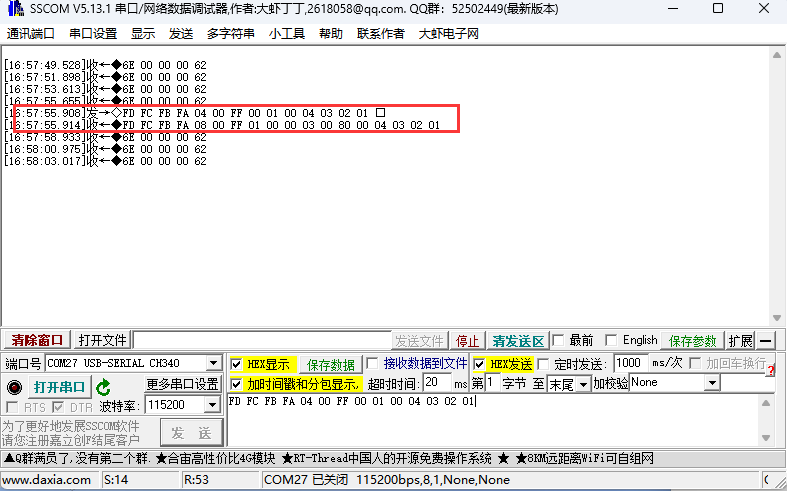
(2)檢測(cè)收發(fā)指令是否正常
發(fā)送使能配置指令(FD FC FB FA 04 00 FF 00 01 00 04 03 02 01),查看是否有回復(fù),正常情況下發(fā)送使能配置指令回復(fù)后數(shù)據(jù)會(huì)停止上報(bào),需要在3s內(nèi)發(fā)送參數(shù)指令,3s內(nèi)不發(fā)送指令時(shí),會(huì)自動(dòng)退出配置模式。
2.1.簡(jiǎn)單測(cè)試
(1) 默認(rèn)參數(shù)
(1)簡(jiǎn)單測(cè)試
簡(jiǎn)單測(cè)試?yán)走_(dá)是否正常時(shí),可以將最大檢測(cè)距離設(shè)置為0.7米,目標(biāo)消失延遲時(shí)間設(shè)置為10s,頻率都調(diào)整成8HZ,響應(yīng)速度調(diào)整成快速再去測(cè)試,修改參數(shù)之后,再寫入傳感器設(shè)置。如果想看是否寫入成功,可以再讀取一下設(shè)置。

此時(shí)進(jìn)入目標(biāo)信息頁面,查看狀態(tài)變化,如果人在0.7m的探測(cè)范圍內(nèi)時(shí),則狀態(tài)顯示為紅色。
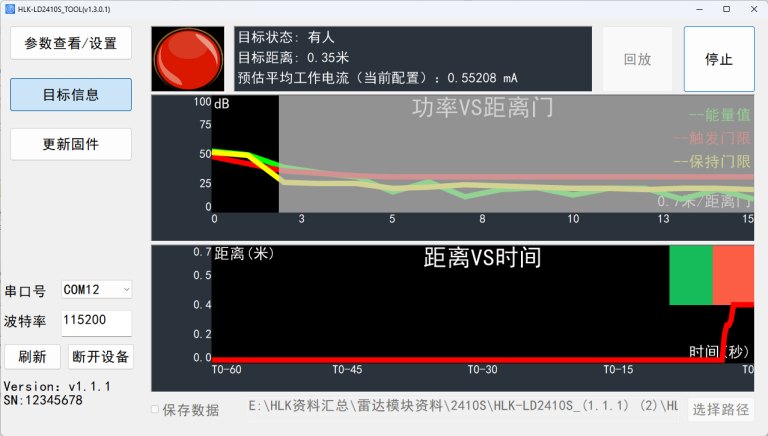
離開探測(cè)范圍后狀態(tài)變?yōu)榫G色。
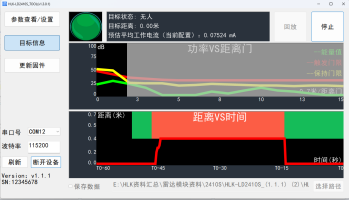
如果狀態(tài)有變化就說明,模塊工作是正常的。
三.注意事項(xiàng)及常見問題整理
3.1.固件和上位機(jī)的對(duì)應(yīng)
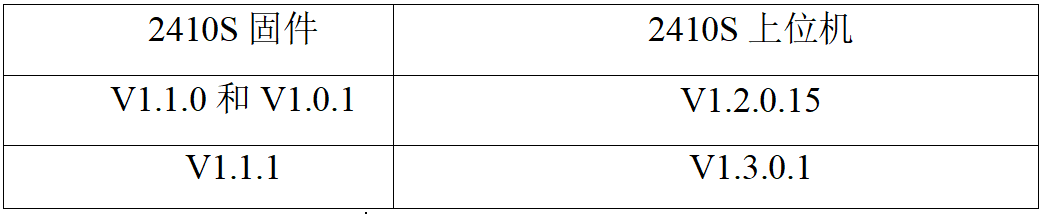
LD2410S分為舊固件(V1.1.0和V1.0.1)和新固件(V1.1.1),分別對(duì)應(yīng)舊上位機(jī)(V1.2.0.15)和新的上位機(jī)(V1.3.0.1),如果不使用對(duì)應(yīng)的上位機(jī),那么就會(huì)出現(xiàn)讀取寫入?yún)?shù)失敗的情況。其對(duì)應(yīng)使用的關(guān)系如下表所示:
3.2.舊版上位機(jī)參數(shù)詳解

(1)最小檢測(cè)距離和最大檢測(cè)距離
如果說此時(shí)設(shè)置最小檢測(cè)距離為1.4,最大檢測(cè)距離為8.4,那么黃色陰影部分就是模塊的探測(cè)區(qū)域。
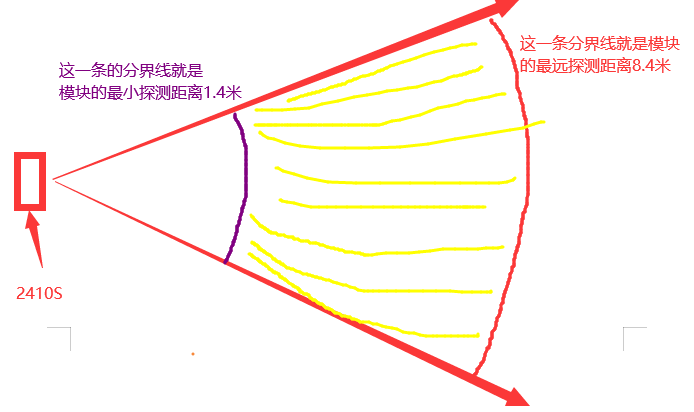
(2) 為什么模塊的探測(cè)距離是8米卻能設(shè)置到8.4米?
距離參數(shù)只能設(shè)置0.7的倍數(shù),也就是說,如果你需要探測(cè)6米的距離,那么你最大檢測(cè)距離就需要設(shè)置6.3的距離,當(dāng)然,如果你直接設(shè)置成6米,寫入?yún)?shù)后,是會(huì)自動(dòng)保存成離你設(shè)置的最近的數(shù)字,也就是說如果你輸入的是6,寫入?yún)?shù)后,自動(dòng)變成6.3。
(3)為什么最小距離門設(shè)置成1.4,1.4米內(nèi)還能夠被探測(cè)到?
一般設(shè)置都不建議設(shè)置最小距離門,默認(rèn)保持為0,因?yàn)槟K探測(cè)距離可能有誤差,并不能完全去屏蔽前面的探測(cè)距離。
(4)距離門是什么?
簡(jiǎn)單的說就是一段距離,總共有15個(gè)距離門,一個(gè)距離門0.7米,共10.5米的距離,但2410S模塊實(shí)際只有8米的檢測(cè)距離,也就是說只有前12個(gè)距離門是有效距離門。
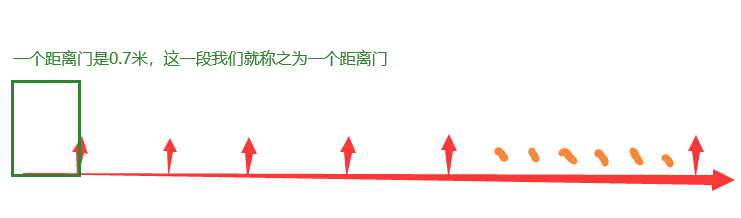
(5)距離和門限有什么對(duì)應(yīng)關(guān)系?
一個(gè)距離門的分辨率是0.7米,也就是每個(gè)距離門都有對(duì)應(yīng)的一個(gè)門限參數(shù),比如,00-07,這8個(gè)距離門,00對(duì)應(yīng)的是本身也就是0米,01對(duì)應(yīng)的是0-0.7米,02對(duì)應(yīng)的是0.7-1.4米,以此類推,07對(duì)應(yīng)的是4.2-4.9米。
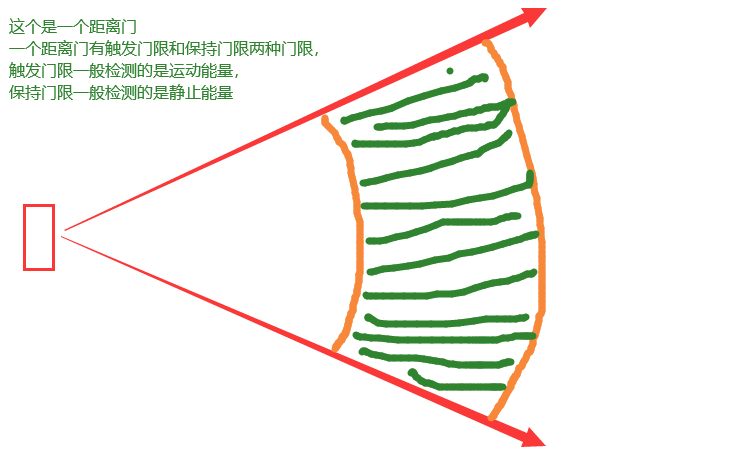
(6) 3.2.6.觸發(fā)門限和觸發(fā)信噪比門限?保持門限和保持信噪比門限都是什么?
觸發(fā)門限和觸發(fā)信噪比門限是一樣的,都是閾值,前期是因?yàn)?0-07號(hào)距離門和08-15號(hào)門的參數(shù)設(shè)置范圍不同,為了區(qū)分,就有兩個(gè)解釋,后面為了方便理解已經(jīng)將兩個(gè)解釋統(tǒng)一為觸發(fā)門限。保持保持門限和保持信噪比門限同理。
(7) 狀態(tài)上報(bào)頻率和距離上報(bào)頻率是什么?
狀態(tài)上報(bào)頻率:傳感器上報(bào)有人/無人狀態(tài)的頻率。
距離上報(bào)頻率:有人狀態(tài)下,傳感器上報(bào)目標(biāo)距離的頻率。
0.5Hz表示2s上傳1次,8Hz表示1s上傳8次。
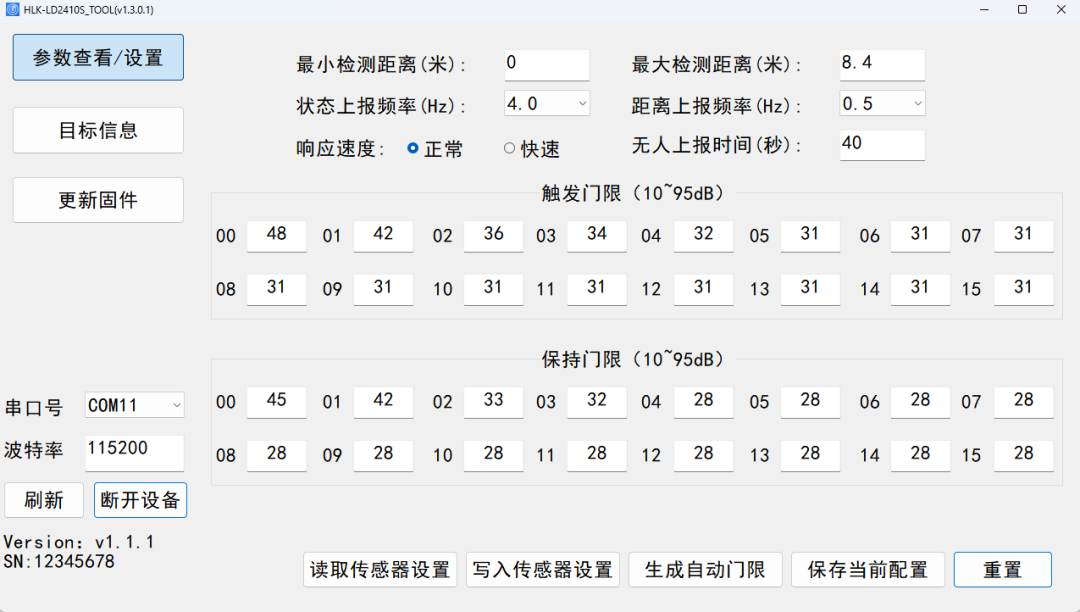
3.3.新版上位機(jī)參數(shù)詳解

(1) 觸發(fā)門限和保持門限是什么?
新版上位機(jī)的觸發(fā)門限對(duì)應(yīng)的就是舊版上位機(jī)的觸發(fā)門限和觸發(fā)信噪比門限,保持門限對(duì)應(yīng)的是就是舊版上位機(jī)的保持門限和保持信噪比門限,簡(jiǎn)單的說門限就是一個(gè)閾值,當(dāng)能量值高于設(shè)定閾值后,就觸發(fā)。雷達(dá)工作也就是這樣,檢測(cè)到物體的能量值大于設(shè)定的閾值,那么就觸發(fā),否則就不觸發(fā)。
(2)讀取/寫入傳感器設(shè)置是什么?
寫入傳感器就是寫參數(shù),讀取傳感器就是讀參數(shù),修改完參數(shù)后,就可以寫入設(shè)置,設(shè)定的參數(shù)就寫進(jìn)入,需要讀取參數(shù)時(shí)就使用讀取傳感器設(shè)置。
(3)生成自動(dòng)門限是干什么的?
這個(gè)就是用來排除環(huán)境干擾的,一般是在無人環(huán)境下檢測(cè)底噪,一般適用于默認(rèn)參數(shù)下,人不在探測(cè)范圍內(nèi)還是檢測(cè)到有人,此時(shí)就可以使用這個(gè)功能。
打個(gè)比喻,此時(shí)01觸發(fā)門限值是42,01保持門限值是42,但此時(shí)環(huán)境無人,還是一直觸發(fā)有人,使用這個(gè)功能檢測(cè)完底噪后01號(hào)觸發(fā)門限變成43,01保持門限變成43,此時(shí)再檢測(cè),狀態(tài)就可以從有人變成無人,不會(huì)一直觸發(fā)有人。
(4)無人上報(bào)時(shí)間是什么?
每個(gè)距離門有兩個(gè)門限,一個(gè)觸發(fā)門限,一個(gè)保持門限,只有當(dāng)所有距離門的所有能量值低于所有門限后,超過這個(gè)時(shí)間,才會(huì)從有人變成無人狀態(tài)。默認(rèn)最小是10s,受到內(nèi)部算法限制,目前不可再調(diào)小。
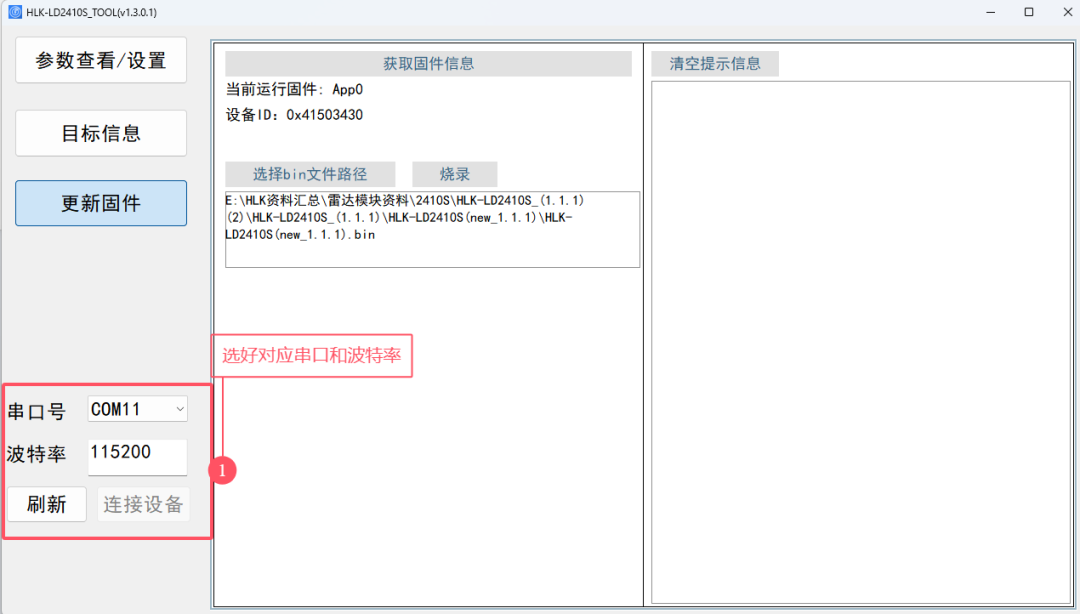
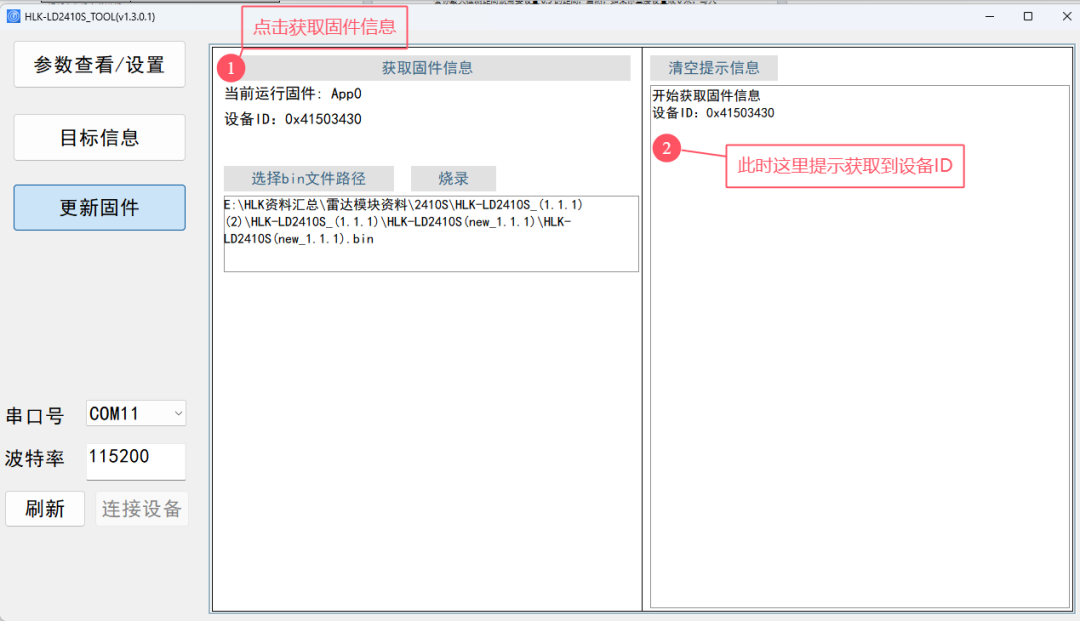
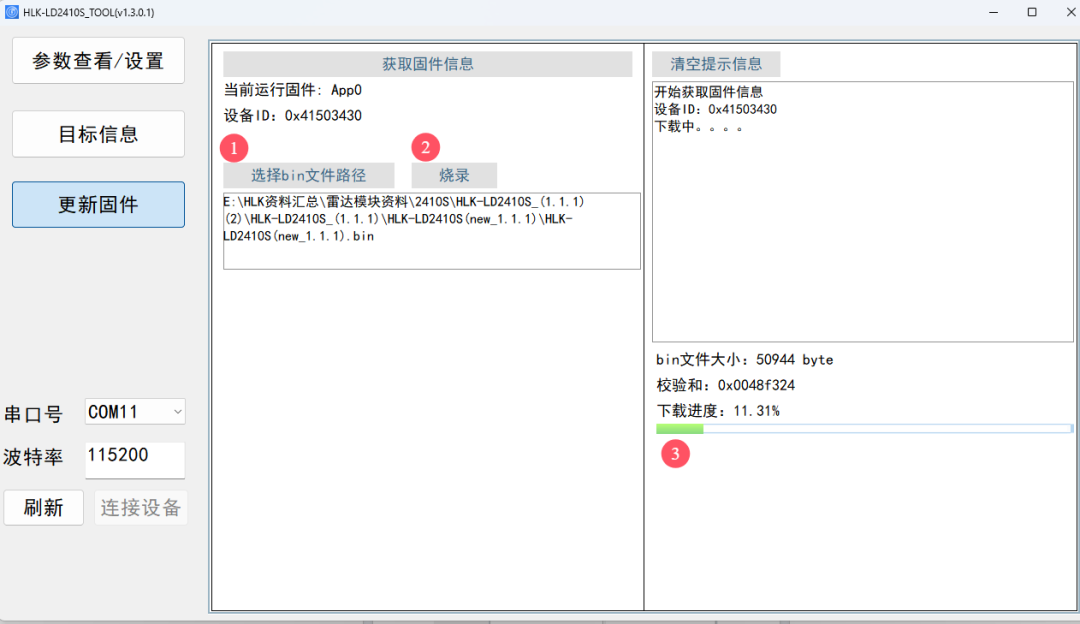
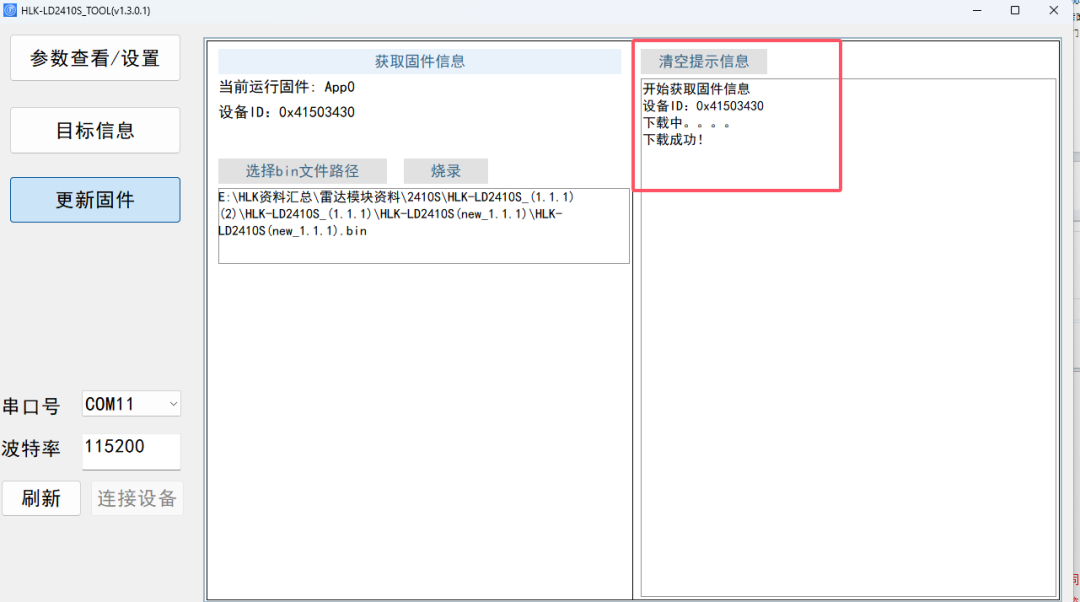
3.4.如何OTA升級(jí)固件
選擇對(duì)應(yīng)串口和波特率,注意此時(shí)不要點(diǎn)擊連接設(shè)備,下一步點(diǎn)擊獲取固件信息,再下一步選擇bin文件的路徑,最后點(diǎn)擊燒錄即可。
3.5.常見問題整理
(1)串口設(shè)備打開失敗?
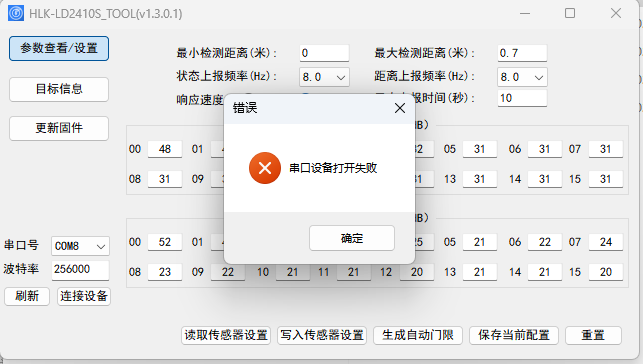
解決方法:
a.檢查串口號(hào),波特率是否有選對(duì)。默認(rèn)波特率為115200。
b.檢查接線是否接錯(cuò),TX,RX是否有反接。
c.第三方串口工具和上位機(jī)不能同時(shí)使用,打開上位機(jī)時(shí)需要把第三方串口工具關(guān)閉。
d.可能模塊接線松動(dòng),可以重新拔插下串口小板,再重新打開上位機(jī)。
(2) 寫入/讀取參數(shù)失敗?

解決辦法:上位機(jī)工具使用錯(cuò)誤,2410S的上位機(jī)和2420的上位機(jī)有許多用戶都會(huì)混淆,遇到這種情況需要先確認(rèn)手上的模塊是哪款模塊,一般模塊上會(huì)有絲印可以辨別。
(3) 如何切換標(biāo)準(zhǔn)數(shù)據(jù)模式和解析標(biāo)準(zhǔn)數(shù)據(jù)?
a.發(fā)送使能配置命令:FD FC FB FA 04 00 FF 00 01 00 04 03 02 01
b.發(fā)送切換標(biāo)準(zhǔn)數(shù)據(jù)命令:FD FC FB FA 08 00 7A 00 00 00 01 00 00 00 04 03 02 01
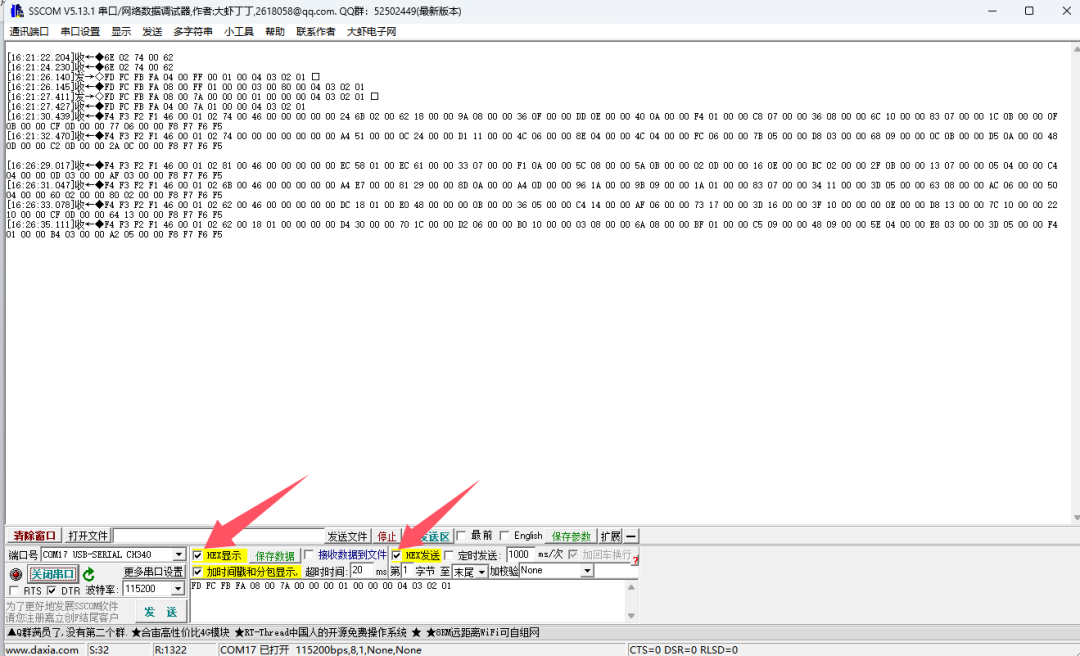
(4) 如何解析標(biāo)準(zhǔn)數(shù)據(jù)?
[1007.176]收←◆F4 F3 F2 F1 46 00 01 02 69 00 46 00 BC 1B 00 00 66 3B 00 00 0E 0D 00 00 F4 01 00 00 9C 01 00 00 64 00 00 00 64 00 00 00 DF 00 00 00 3C 01 00 00 5C 03 00 00 9C 01 00 00 D8 02 00 00 90 01 00 00 3C 01 00 00 58 02 00 00 84 03 00 00 F8 F7 F6 F5
幀頭:F4 F3 F2 F1
幀內(nèi)數(shù)據(jù)長度:46 00
數(shù)據(jù)類型:01
目標(biāo)狀態(tài):02
目標(biāo)距離:69 00
保留位:46 00
各距離門能量值
0號(hào)門能量值:BC 1B 00 00 計(jì)算方式如下:

1號(hào)門能量值:66 3B 00 00 2號(hào)門能量值:0E 0D 00 00
3號(hào)門能量值:F4 01 00 00 4號(hào)門能量值:9C 01 00 00
5號(hào)門能量值:64 00 00 00 6號(hào)門能量值:64 00 00 00
7號(hào)門能量值:DF 00 00 00 8號(hào)門能量值:3C 01 00 00
9號(hào)門能量值:5C 03 00 00 10號(hào)門能量值:9C 01 00 00
11號(hào)門能量值:D8 02 00 00 12號(hào)門能量值:90 01 00 00
13號(hào)門能量值:3C 01 00 00 14號(hào)門能量值:58 02 00 00
15號(hào)門能量值:84 03 00 00
幀尾:F8 F7 F6 F5
四.LD2410S模塊調(diào)試參數(shù)
4.1.使用自動(dòng)生成門限調(diào)整參數(shù)
(1)使用上位機(jī)自動(dòng)生成門限
保持探測(cè)范圍內(nèi)無人,開始生成自動(dòng)門限,生成門限的參數(shù)默認(rèn)不修改,120s后參數(shù)生成會(huì)自動(dòng)修改。

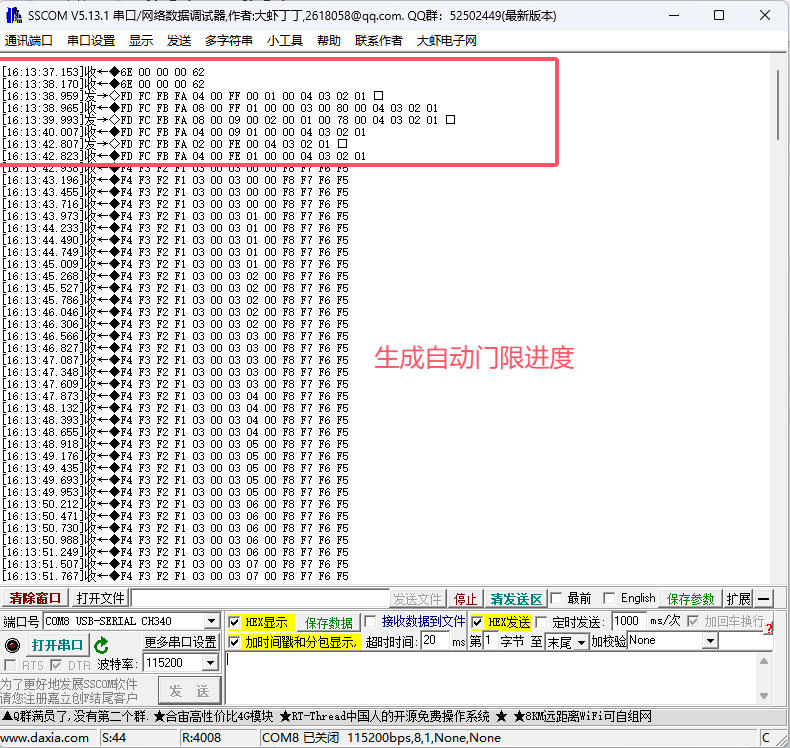
(2)使用串口指令自動(dòng)生成門限
依次發(fā)送下面的三條指令,注意發(fā)送使能配置后,需要在3s內(nèi)發(fā)送下一條指令,否則無效。
FD FC FB FA 04 00 FF 00 01 00 04 03 02 01(使能配置指令)
FD FC FB FA 08 00 09 00 02 00 01 00 78 00 04 03 02 01(生成自動(dòng)門限指令)
FD FC FB FA 02 00 FE 00 04 03 02 01(關(guān)閉使能配置指令)
4.2.微調(diào)參數(shù)
此處的微調(diào)參數(shù)是在自動(dòng)生成門限之后的基礎(chǔ)上去微調(diào),根據(jù)上述對(duì)觸發(fā)門限和保持門限的理解,相應(yīng)的去調(diào)整觸發(fā)門限和保持門限的值。
(1)容易誤觸時(shí)調(diào)高觸發(fā)門限的值。
(2)難觸發(fā)時(shí),調(diào)低觸發(fā)門限的值。
(3)保持不住時(shí)可適當(dāng)延長無人上報(bào)時(shí)間和調(diào)低保持門限的值
(4)一直保持有人時(shí)可適當(dāng)調(diào)高保持門限的值。
-
測(cè)試
+關(guān)注
關(guān)注
8文章
5662瀏覽量
128528 -
接線
+關(guān)注
關(guān)注
29文章
764瀏覽量
33849 -
雷達(dá)
+關(guān)注
關(guān)注
50文章
3100瀏覽量
119750
發(fā)布評(píng)論請(qǐng)先 登錄
s3c2410中文資料下載
s3c2410中文手冊(cè)(第1,2,3,5,6,8,16章)
2410中文資料,2410中文數(shù)據(jù)手冊(cè)
納米軟件科普:一些關(guān)于S參數(shù)常見問題的問答
HLK-LD2410B和HLK-LD2410C雷達(dá)模塊功能更新支持APP OTA升級(jí)光敏固件
24G超低功耗雷達(dá)模塊LD2410S功耗實(shí)測(cè)

接線端子在變頻器故障檢修時(shí)的常見問題

超低功耗人體存在毫米波傳感器LD2410S測(cè)試

手把手教學(xué)!HLK-LD2410B/C新手必看攻略!測(cè)試教程、模塊調(diào)參一文詳解~

LD2410B/C新手必看攻略! 測(cè)試教程、模塊調(diào)參一文詳解~





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論