") 關(guān)于歐盟法規(guī)中測試場景的研究
關(guān)于歐盟法規(guī)中測試場景的研究

關(guān)于歐盟法規(guī)中測試場景的研究
1.引言
場景是智能網(wǎng)聯(lián)汽車測試技術(shù)的基礎(chǔ),基于場景的功能測試方法對于彌補(bǔ)基于里程的測試方法的局限性,提高系統(tǒng)開發(fā)效率、產(chǎn)品落地效率等方面都有重要作用。在眾多的場景來源中,標(biāo)準(zhǔn)法規(guī)場景是系統(tǒng)功能在研發(fā)和認(rèn)證階段需要滿足的基本場景,能夠?qū)χ悄芫W(wǎng)聯(lián)汽車應(yīng)有的基本能力進(jìn)行測試。法規(guī)類場景可確保智能網(wǎng)聯(lián)汽車在不同地區(qū)均能符合法規(guī)要求,從而確保車輛在道路上的安全性、合規(guī)性和可靠性。
在智能網(wǎng)聯(lián)汽車的立法層面,歐盟等國際組織持續(xù)開展法規(guī)制定工作,并且已經(jīng)形成了多個(gè)成果,包括EU 2019/2144《新的車輛通用安全法規(guī)》、UN R171《駕駛員控制輔助系統(tǒng)(DCAS)型式批準(zhǔn)的統(tǒng)一規(guī)定》、UN R157《自動車輛保持系統(tǒng)(ALKS)型式批準(zhǔn)的統(tǒng)一規(guī)定》、EU 2022/1426《全自動駕駛車輛自動駕駛系統(tǒng)(ADS)型式批準(zhǔn)的統(tǒng)一程序和技術(shù)規(guī)范》等,其中均針對測試場景進(jìn)行了相關(guān)描述與規(guī)定。
同時(shí),對于海外目標(biāo)市場的車企來說,遵守目標(biāo)國家或地區(qū)的法規(guī)標(biāo)準(zhǔn),滿足當(dāng)?shù)氐漠a(chǎn)品準(zhǔn)入要求是進(jìn)入該市場的必要條件。因此,企業(yè)無論是面向“出海”需求還是單純面向算法驗(yàn)證的需求,法規(guī)類測試場景應(yīng)被考慮為必須項(xiàng)。由于政策、市場等原因,歐洲成為國內(nèi)車企出海的主要目標(biāo)地區(qū)。但目前歐盟智能駕駛標(biāo)準(zhǔn)法規(guī)中并未給出具體場景參數(shù),賽目科技對此開展相關(guān)研究,基于“功能場景→邏輯場景→具體場景”的邏輯思路,并結(jié)合“合理可預(yù)見”和專家經(jīng)驗(yàn)的仿真參數(shù)設(shè)置方法,構(gòu)建具體測試場景集,為企業(yè)開展基于場景的模擬仿真測試提供參考。
2.測試場景要求及泛化方法
2.1標(biāo)準(zhǔn)法規(guī)測試場景
在歐盟汽車標(biāo)準(zhǔn)法規(guī)體系中,以汽車安全框架性技術(shù)法規(guī)EU2019/2144為代表,旨在加強(qiáng)對車內(nèi)乘員、弱勢道路使用者的保護(hù),減少交通事故率和人員傷亡。EU 2019/2144規(guī)定了在汽車安全領(lǐng)域應(yīng)滿足各項(xiàng)技術(shù)法規(guī),大部分直接采用了聯(lián)合國制修訂的UN R汽車技術(shù)法規(guī),逐步建立起從組合駕駛輔助到自動駕駛的全方位監(jiān)管體系。其中,UN R171針對駕駛員控制輔助系統(tǒng)(DCAS),規(guī)定了持續(xù)橫向和縱向運(yùn)動控制輔助系統(tǒng)的性能要求[1];UN R157針對自動車道保持系統(tǒng)(ALKS),將特定交通環(huán)境中的自動駕駛系統(tǒng)車速上限由最開始的60 km/h限制擴(kuò)展到130 km/h,并允許自動變道[2];針對更高級別的自動駕駛型式批準(zhǔn),歐盟率先獨(dú)立制定自己的規(guī)則EU 2022/1426,規(guī)定了適用于全自動車輛自動駕駛系統(tǒng)(ADS)型式批準(zhǔn)的統(tǒng)一程序和技術(shù)規(guī)范[3]。以上法規(guī)均描述了各種測試場景要求,為智能網(wǎng)聯(lián)汽車提供了統(tǒng)一的測試基準(zhǔn)。
2.1.1 R171測試場景
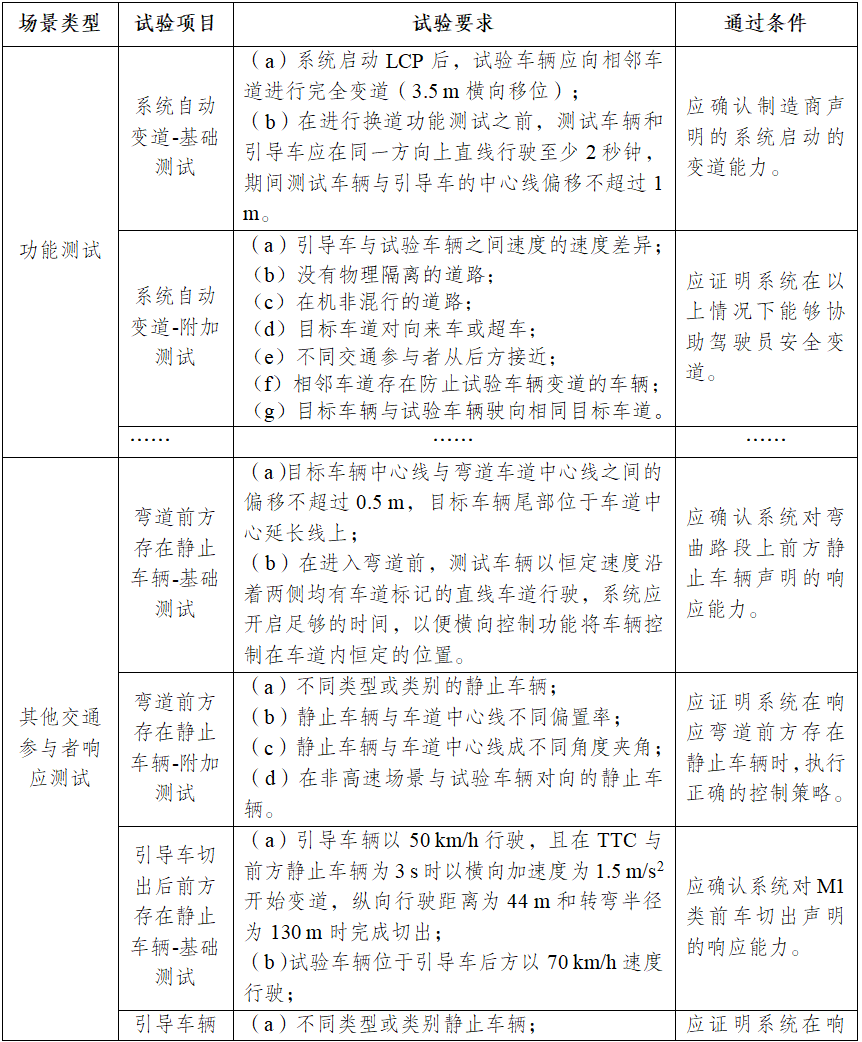
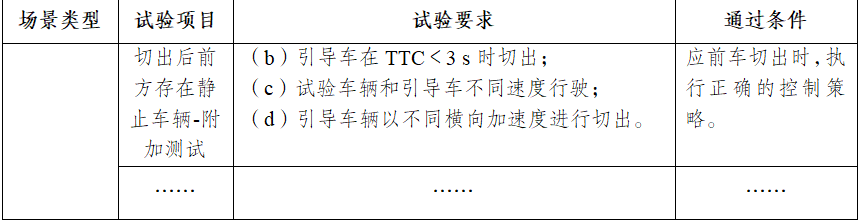
UN R171制定了關(guān)于駕駛員控制輔助系統(tǒng)(DCAS)型式認(rèn)證的統(tǒng)一規(guī)定,可通過持續(xù)的橫向和縱向運(yùn)動控制,協(xié)助人類駕駛員執(zhí)行車輛駕駛?cè)蝿?wù)(不完全接管駕駛),是ADAS的一個(gè)子集。在進(jìn)行提交型式認(rèn)證文件的測試場景部分,應(yīng)至少包含附錄4中4.2.5部分提出的功能測試和其他交通參與者響應(yīng)測試兩部分內(nèi)容,目的是驗(yàn)證OEM提交的系統(tǒng)設(shè)計(jì)文件中描述系統(tǒng)所具備的能力及行為表現(xiàn)與在實(shí)際測試中是否一致。其中,DCAS功能測試場景包括車道居中控制、駕駛員主動變道以及系統(tǒng)發(fā)起的車道變更測試。在滿足DCAS功能測試場景同時(shí)還需滿足其他交通參與者識別及響應(yīng)測試場景,如直道或彎道前方靜止車輛、直道前方慢行車輛、目標(biāo)車輛切出后存在靜止車輛、相鄰車道車輛切入、前方存在靜止行人或自行車、行人或自行車橫穿道路、車輛右轉(zhuǎn)與橫穿行人或自行車沖突、直行車輛與對向左轉(zhuǎn)車輛或右側(cè)直行車輛沖突等測試,試驗(yàn)項(xiàng)目如表1所示。
表1R171測試場景清單
2.1.2 R157測試場景
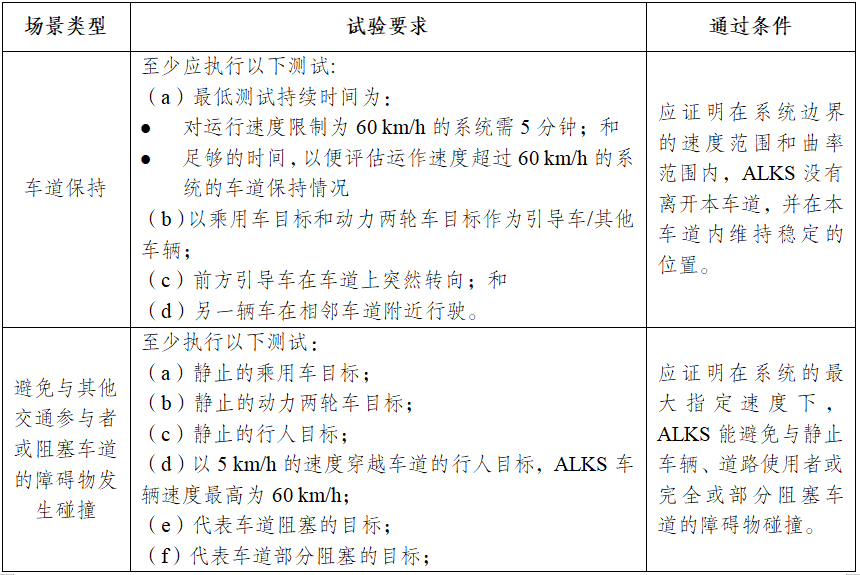
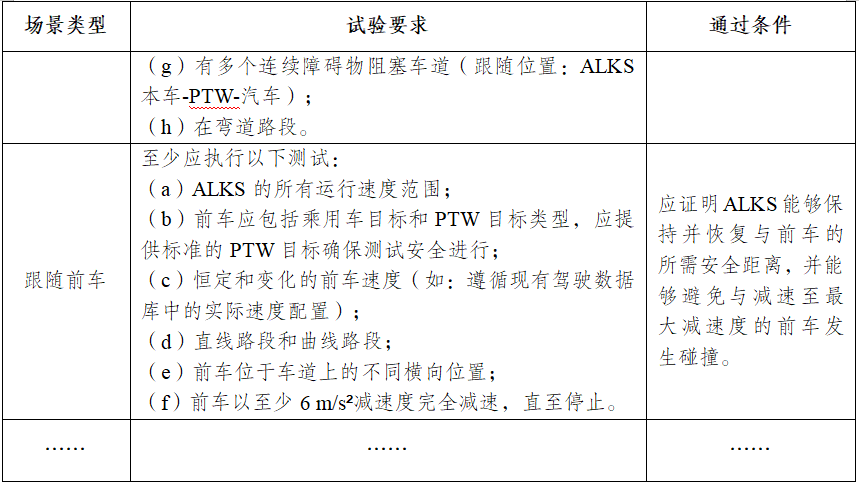
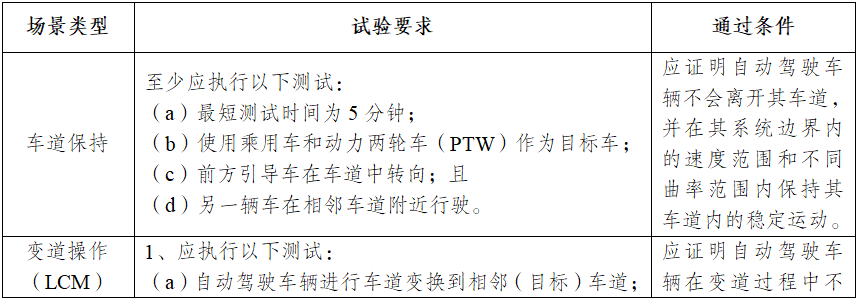
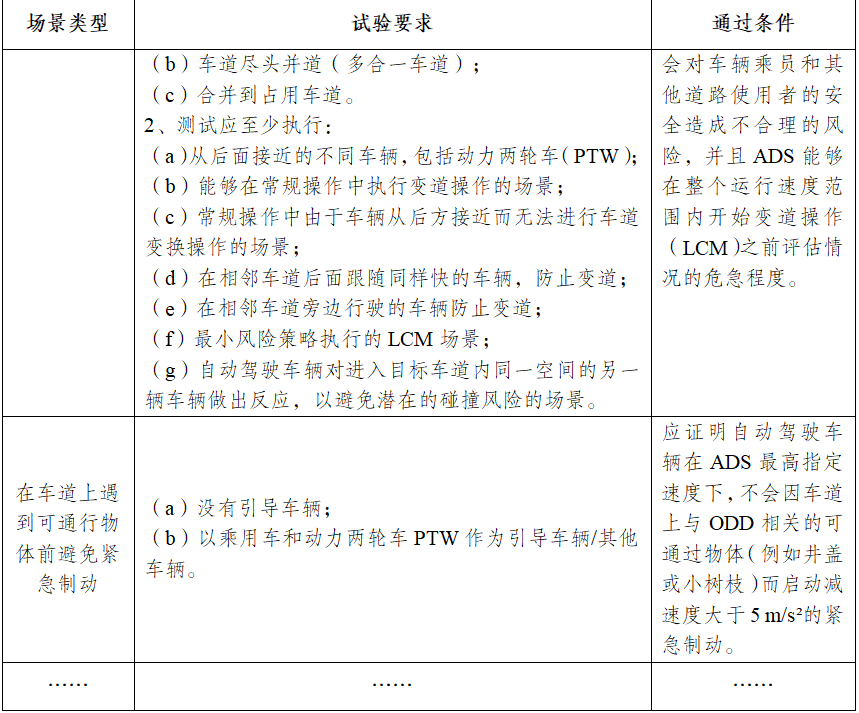
UN R157制定了關(guān)于自動車道保持系統(tǒng)(ALKS)車輛認(rèn)證的統(tǒng)一規(guī)定,ALKS控制車輛橫向和縱向運(yùn)動使其保持在車道內(nèi)行駛,激活后無需駕駛員進(jìn)一步的命令。該法規(guī)修訂后基本覆蓋了高速公路自動駕駛?cè)珗鼍埃辉賰H適用于高速公路低速或堵車場景。法規(guī)中附件5規(guī)定了場地測試的最小場景集合,目的是驗(yàn)證本法規(guī)第5~7段中對ALKS的技術(shù)要求,以評估系統(tǒng)關(guān)于動態(tài)駕駛?cè)蝿?wù)的性能。測試場景包括車道保持、避免與其他交通參與者或阻塞車道的障礙物相撞、跟隨前車、前車切入、前車變道后出現(xiàn)靜態(tài)障礙物、變道等,試驗(yàn)項(xiàng)目如表2所示。
表2R157測試場景清單
2.1.3 EU 2022/1426測試場景
EU 2022/1426制定了關(guān)于全自動駕駛車輛(fully automated vehicles)型式認(rèn)證的統(tǒng)一流程和技術(shù)標(biāo)準(zhǔn),是世界上首個(gè)允許成員國批準(zhǔn)注冊和銷售高級別自動駕駛技術(shù)汽車的技術(shù)法規(guī)。法規(guī)中附件3第三部分PART 3規(guī)定了實(shí)車測試的最小測試集合,其中8.1、8.2、8.5、8.6、8.7、8.8、8.9在封閉場地內(nèi)進(jìn)行測試,8.3、8.4、8.10在實(shí)際道路上進(jìn)行測試。目的是驗(yàn)證附件2中所述的最低性能要求、ADS的功能和附件3第二部分中所述的制造商的安全概念,以評估ADS的性能。測試場景包括車道保持、變道操作、避撞測試、跟隨前車、高速公路以及不同駕駛模式切換測試場景等,試驗(yàn)項(xiàng)目如表3所示。
表3EU2022/1426測試場景清單
2.2基于法規(guī)的場景構(gòu)建方法
基于“功能場景→邏輯場景→具體場景”的分析方法,結(jié)合賽目針對場景參數(shù)泛化原則的研究經(jīng)驗(yàn),構(gòu)建具體測試場景集,從而實(shí)現(xiàn)各法規(guī)中針對不同等級駕駛自動化系統(tǒng)的功能驗(yàn)證。首先,基于試驗(yàn)要求進(jìn)行功能場景轉(zhuǎn)化,為保證場景的完整性,在試驗(yàn)要求映射場景元素基礎(chǔ)上,還需增加一些其他必要元素進(jìn)行組合,形成一個(gè)功能場景,至少包括道路、道路設(shè)施、運(yùn)動對象(自車和其他交通參與者)、天氣環(huán)境的描述;其次,基于功能場景中確定的元素類別,映射場景參數(shù)并設(shè)定邏輯場景參數(shù)空間;最后,對場景參數(shù)分析并選取關(guān)鍵參數(shù)進(jìn)行充分泛化,形成對應(yīng)的仿真參數(shù)組合用于仿真試驗(yàn)。具體測試場景集分析流程如圖1所示。
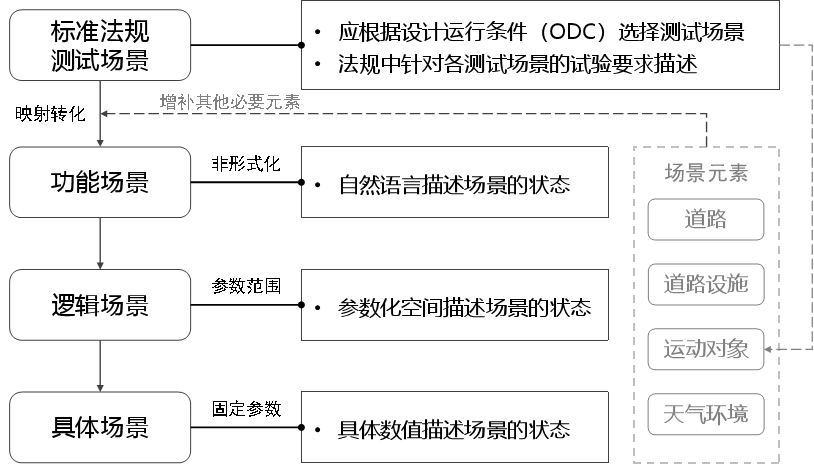
圖1 具體測試場景集分析流程
以R157中“車道保持試驗(yàn)”為例,基于上述分析流程構(gòu)建具體試驗(yàn)場景,車道保持類具體場景生成框架如圖2所示。
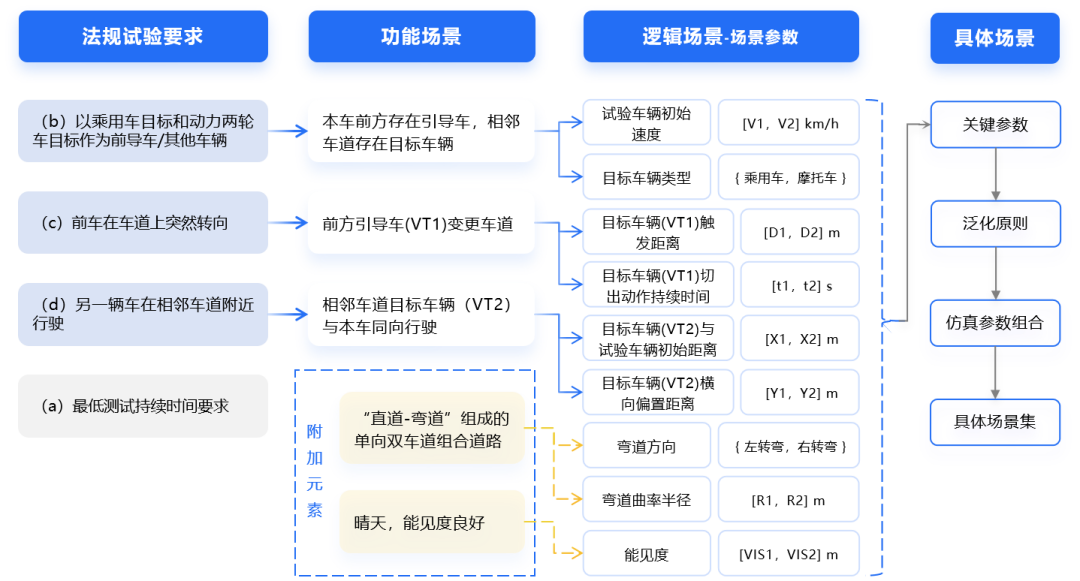
圖2 車道保持試驗(yàn)具體場景生成框架
通過試驗(yàn)要求分析,生成相應(yīng)的符合測試需求的功能場景。除法規(guī)中針對自車和其他交通參與者的位置與動作信息外,補(bǔ)充設(shè)定直道-彎道的雙車道組合道路作為道路拓?fù)漕愋停瑫r(shí)明確能見度良好的天氣條件,構(gòu)建功能場景。基于上述功能場景和系統(tǒng)的設(shè)計(jì)運(yùn)行條件邊界,映射場景參數(shù)并得到相應(yīng)參數(shù)空間,場景參數(shù)類型包括:試驗(yàn)車輛初始速度、目標(biāo)車輛(VT1/VT2)類型、目標(biāo)車輛(VT1)觸發(fā)距離、目標(biāo)車輛(VT2)與試驗(yàn)車輛初始距離、目標(biāo)車輛(VT2)橫向偏置距離、彎道曲率半徑等。根據(jù)試驗(yàn)項(xiàng)目篩選關(guān)鍵參數(shù),確定泛化原則,通過定義測試參數(shù)的不同組合(如車輛速度、目標(biāo)物類型和橫向偏置、彎道曲率半徑等),從而得到具體試驗(yàn)場景集。
3.仿真測試案例
為驗(yàn)證上述具體場景集分析方法,本文基于Sim Pro仿真測試工具,參考圖2的設(shè)計(jì)思路,選取“彎道車道保持試驗(yàn)項(xiàng)目”開展具體場景搭建及測試,場景描述示例如下。
3.1彎道車道保持試驗(yàn)
3.1.1 試驗(yàn)場景
彎道車道保持試驗(yàn)場景應(yīng)符合如下要求,示意圖如圖3所示。
a)試驗(yàn)道路:一條直道、彎道和直道組成的單向雙車道組合道路,彎道前直道長度至少150 m,彎道后直道長度至少200 m,車道寬度為3.75 m,道路表面附著系數(shù)30.8。道路最高限速(V0Lim)、彎道方向(Fc)、彎道長度(Lc)按表4取值,彎道曲率半徑(Rρ)按表5取值。
a)道路交通標(biāo)線:同向車道間車道線類型為白色虛線,其余為白色實(shí)線。
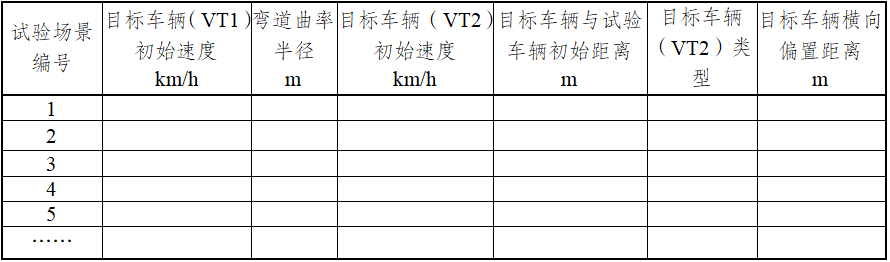
b)試驗(yàn)環(huán)境:試驗(yàn)車輛(VUT)前方存在目標(biāo)車輛(VT1),相鄰車道存在目標(biāo)車輛(VT2)同向勻速行駛。試驗(yàn)車輛初始位置(D0VUT)、目標(biāo)車輛觸發(fā)距離(DX0trigger_VT1)、目標(biāo)車輛切出動作持續(xù)時(shí)間(To-VT1)、能見度(VIS)按表4取值,目標(biāo)車輛類型(Type_VTn)、目標(biāo)車輛(VT1)初始速度(V0VT1)、目標(biāo)車輛(VT2)初始速度(V0VT2)、目標(biāo)車輛與試驗(yàn)車輛初始距離(D0VUT_VT2)、目標(biāo)車輛橫向偏置距離(DYVT2_LC)按表5取值。
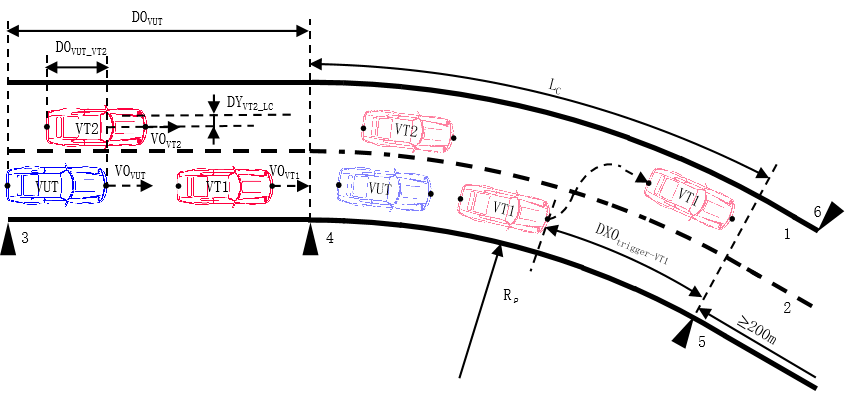
標(biāo)引序號說明:
1——1號車道;
2——2號車道;
3——具體試驗(yàn)場景起點(diǎn);
4——彎道起點(diǎn);
5——彎道終點(diǎn);
6——具體試驗(yàn)場景終點(diǎn)。
圖3 彎道車道保持試驗(yàn)場景示意圖
如表4和表5所示,表4是本場景中保持常量的參數(shù),表5是本場景中進(jìn)行泛化的參數(shù),應(yīng)將表4的所有參數(shù)與表5任意一行參數(shù)進(jìn)行組合,構(gòu)成具體試驗(yàn)場景。
如表4和表5所示,表4是本場景中保持常量的參數(shù),表5是本場景中進(jìn)行泛化的參數(shù),應(yīng)將表4的所有參數(shù)與表5任意一行參數(shù)進(jìn)行組合,構(gòu)成具體試驗(yàn)場景。
表4 彎道車道保持試驗(yàn)場景一般參數(shù)列表
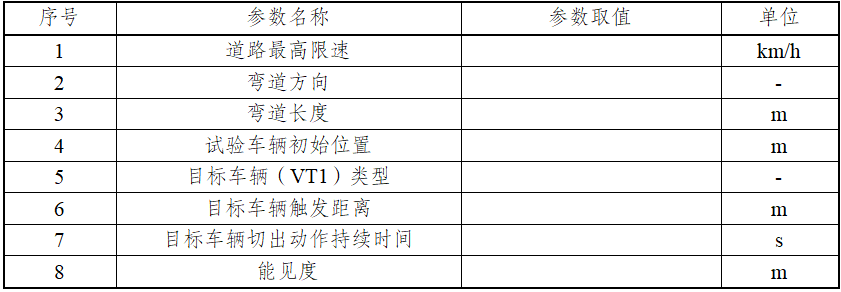
表5 彎道車道保持試驗(yàn)場景列表
3.1.2 試驗(yàn)步驟
應(yīng)根據(jù)表4和表5組成的具體試驗(yàn)場景進(jìn)行仿真試驗(yàn),試驗(yàn)步驟應(yīng)符合以下要求:
a)試驗(yàn)初始時(shí),試驗(yàn)車輛(VUT)穩(wěn)定跟隨前方目標(biāo)車輛(VT1),從初始位置(D0VUT)以初始速度(V0VT1)與目標(biāo)車輛(VT1)在右側(cè)車道內(nèi)沿車道中心線行駛。同時(shí),目標(biāo)車輛(VT2)以初始速度(V0VT2),與試驗(yàn)車輛相對縱向距離(D0VUT_VT2)和橫向偏置距離(DYVT2_LC)在試驗(yàn)車輛左側(cè)相鄰車道行駛。
b)當(dāng)試驗(yàn)車輛(VUT)跟隨目標(biāo)車輛(VT1)進(jìn)入彎道后,且目標(biāo)車輛(VT1)與彎道終點(diǎn)相對縱向距離達(dá)到目標(biāo)車輛觸發(fā)距離(DX0trigger_VT1)時(shí),目標(biāo)車輛(VT1)開始以某一合理軌跡,按照切出動作持續(xù)時(shí)間(To-VT1)和預(yù)設(shè)速度(V0VT1)勻速切出至左側(cè)相鄰車道沿車道中心線繼續(xù)行駛。
c)當(dāng)達(dá)到以下任一結(jié)束條件時(shí),仿真試驗(yàn)結(jié)束:
1)目標(biāo)車輛(VT1)完成切出動作后行駛100 m;
1)試驗(yàn)車輛(VUT)與任一目標(biāo)車輛(VT1/VT2)發(fā)生碰撞;
2)試驗(yàn)車輛(VUT)停車1 s以上。
3.1.3 試驗(yàn)記錄信息要求
應(yīng)記錄以下信息:
a)試驗(yàn)車輛(VUT)外輪廓與所有目標(biāo)車輛(VT1/VT2)外輪廓的最小距離信息或判斷是否碰撞的其他信息;
a)試驗(yàn)車輛(VUT)停車時(shí)長。
3.1.4 通過要求
試驗(yàn)車輛應(yīng)符合以下要求:
a)試驗(yàn)車輛(VUT)不與任一目標(biāo)車輛(VT1/VT2)發(fā)生碰撞;
b)試驗(yàn)車輛(VUT)在本車道內(nèi)保持穩(wěn)定運(yùn)動;
c)試驗(yàn)車輛(VUT)不發(fā)出介入請求或執(zhí)行最小風(fēng)險(xiǎn)策略;
d)試驗(yàn)車輛(VUT)未發(fā)生1 s以上停車行為。
3.2試驗(yàn)場景仿真示例
以3.1彎道車道保持試驗(yàn)項(xiàng)目中泛化的某一具體試驗(yàn)場景為例,其參數(shù)組合為:彎道方向?yàn)橛肄D(zhuǎn)彎,彎道曲率半徑500 m,目標(biāo)車輛VT1和VT2均為乘用車,目標(biāo)車輛(VT1)初始速度30 km/h,目標(biāo)車輛(VT2)初始速度40 km/h,目標(biāo)車輛(VT2)與試驗(yàn)車輛初始距離 -80 m,目標(biāo)車輛(VT2)橫向偏置距離 0.2 m,目標(biāo)車輛(VT1)觸發(fā)距離100 m,目標(biāo)車輛(VT1)切出動作持續(xù)時(shí)間3 s。仿真場景運(yùn)行視頻如下:
6.結(jié)語
本篇文章基于歐盟法規(guī)中測試場景要求進(jìn)行分析,對具體試驗(yàn)場景的生成提出“試驗(yàn)要求-場景元素-參數(shù)空間-參數(shù)組合”的逐級映射框架,分別論述標(biāo)準(zhǔn)法規(guī)測試場景清單、具體測試場景集分析流程以及車道保持試驗(yàn)具體場景生成框架示例。最后,基于法規(guī)的具體試驗(yàn)場景構(gòu)建方法,以彎道車道保持試驗(yàn)項(xiàng)目為例進(jìn)行仿真驗(yàn)證。未來,賽目科技還將從智能網(wǎng)聯(lián)汽車國際法規(guī)方面持續(xù)橫向擴(kuò)展測試場景集范圍,為不同等級駕駛自動化系統(tǒng)功能提供統(tǒng)一的測試基準(zhǔn)。
參考文獻(xiàn)
[1]Proposal for a new UN Regulation on uniform provisions concerning the approval of vehicle of vehicles with regard to Driver Control Assistance System (DCAS), 2024.
[2]01 series of amendments to UN Regulation No.157(Automated Lane Keeping Systems), 2023.
[3]COMMISSION IMPLEMENTING REUGLATION(EU) 2022/1426, 2022.
-
測試
+關(guān)注
關(guān)注
8文章
5704瀏覽量
128841 -
智能網(wǎng)聯(lián)汽車
+關(guān)注
關(guān)注
9文章
1159瀏覽量
31530
原文標(biāo)題:關(guān)于歐盟法規(guī)中測試場景的研究
文章出處:【微信號:gh_c85a8e3c0f2a,微信公眾號:賽目科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
海辰儲能獲頒歐盟新電池法規(guī)TüV SüD Mark證書

最新!歐盟 RoHS 與 REACH 法規(guī)解讀
歐盟 RoHS 與 REACH 法規(guī)解讀
自動駕駛測試場景庫的構(gòu)建及評價(jià)方法之場景生成方法研究

億緯鋰能榮獲歐盟電池法規(guī)TüV SüD Mark證書
測試接收機(jī)的技術(shù)原理和應(yīng)用場景
無線連接測試儀的技術(shù)原理和應(yīng)用場景
OTA測試暗箱的技術(shù)原理和應(yīng)用場景
移動終端測試儀的技術(shù)原理和應(yīng)用場景
便攜式示波器的技術(shù)原理和應(yīng)用場景
智駕仿真測試實(shí)戰(zhàn)之自動泊車HiL仿真測試

太陽膜測試儀的技術(shù)原理和應(yīng)用場景
智能IC卡測試設(shè)備的技術(shù)原理和應(yīng)用場景
電源測試設(shè)備——NSAT-8000自動化測試系統(tǒng)在電源模塊測量中的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論