") 卡爾曼濾波在圖像處理中的應(yīng)用實例 如何調(diào)優(yōu)卡爾曼濾波參數(shù)
卡爾曼濾波在圖像處理中的應(yīng)用實例 如何調(diào)優(yōu)卡爾曼濾波參數(shù)
卡爾曼濾波在圖像處理中的應(yīng)用實例
卡爾曼濾波在圖像處理中主要應(yīng)用于目標(biāo)跟蹤、噪聲消除和圖像恢復(fù)等方面。以下是一些具體的應(yīng)用實例:
- 目標(biāo)跟蹤 :
- 噪聲消除 :
- 通過濾除圖像中的噪聲,卡爾曼濾波可以提高圖像的質(zhì)量和可讀性。在醫(yī)學(xué)圖像處理中,卡爾曼濾波可以用于消除醫(yī)學(xué)圖像中的噪聲,如超聲圖像中的斑點(diǎn)噪聲,從而提高圖像的清晰度和診斷準(zhǔn)確性。
- 圖像恢復(fù) :
- 卡爾曼濾波還可以用于恢復(fù)損壞或扭曲的圖像,實現(xiàn)原始圖像的重構(gòu)。在圖像修復(fù)領(lǐng)域,這具有廣泛的應(yīng)用前景。
卡爾曼濾波參數(shù)的調(diào)優(yōu)策略
調(diào)優(yōu)卡爾曼濾波參數(shù)是確保其在實際應(yīng)用中性能優(yōu)異的關(guān)鍵步驟。以下是一些常用的調(diào)優(yōu)策略:
- 理解并設(shè)置Q和R矩陣 :
- Q矩陣代表過程噪聲的協(xié)方差,它反映了系統(tǒng)模型與實際過程之間的誤差。R矩陣代表測量噪聲的協(xié)方差,它與測量設(shè)備的精度有關(guān)。
- 在調(diào)優(yōu)過程中,需要根據(jù)實際系統(tǒng)特性和測量設(shè)備精度來合理設(shè)置Q和R矩陣的值。通常,Q和R被假定為正定常數(shù)矩陣,以保證系統(tǒng)的穩(wěn)定性和收斂性。
- 調(diào)整狀態(tài)轉(zhuǎn)移矩陣F和控制矩陣B :
- 狀態(tài)轉(zhuǎn)移矩陣F描述了系統(tǒng)的動態(tài)過程,它需要根據(jù)實際系統(tǒng)的運(yùn)動規(guī)律進(jìn)行設(shè)置。
- 控制矩陣B用于描述控制輸入對系統(tǒng)狀態(tài)的影響,在大多數(shù)情況下,如果沒有控制輸入,B矩陣可以設(shè)為零矩陣。
- 采用對角矩陣假設(shè) :
- 在沒有充足依據(jù)表明不同狀態(tài)變量或測量之間存在關(guān)聯(lián)的情況下,可以假設(shè)Q和R為對角矩陣。這有助于簡化計算并降低模型復(fù)雜度。
- 使用試錯法進(jìn)行調(diào)整 :
- 初始時可以對Q和R進(jìn)行初步估計,然后根據(jù)實際系統(tǒng)運(yùn)行結(jié)果進(jìn)行評估。通過持續(xù)調(diào)整參數(shù)值,觀察濾波效果的變化,直到獲得滿意的性能表現(xiàn)。
- 借助軟件工具進(jìn)行調(diào)優(yōu) :
- 分析殘差序列和收斂性 :
- 通過觀察狀態(tài)估計值的變動、對比預(yù)測值和測量值的差異以及剖析殘差序列等方法,可以判斷卡爾曼濾波器是否收斂以及收斂速度的快慢。這有助于進(jìn)一步調(diào)整參數(shù)以優(yōu)化濾波性能。
綜上所述,調(diào)優(yōu)卡爾曼濾波參數(shù)需要結(jié)合具體應(yīng)用場景和系統(tǒng)特性進(jìn)行綜合考慮。通過合理設(shè)置Q和R矩陣、調(diào)整狀態(tài)轉(zhuǎn)移矩陣F和控制矩陣B、采用對角矩陣假設(shè)、使用試錯法進(jìn)行調(diào)整以及借助軟件工具進(jìn)行調(diào)優(yōu)等方法,可以顯著提高卡爾曼濾波在實際應(yīng)用中的性能表現(xiàn)。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
濾波參數(shù)
+關(guān)注
關(guān)注
0文章
4瀏覽量
6007 -
圖像處理
+關(guān)注
關(guān)注
27文章
1325瀏覽量
57717 -
監(jiān)控系統(tǒng)
+關(guān)注
關(guān)注
21文章
4033瀏覽量
181296 -
卡爾曼濾波
+關(guān)注
關(guān)注
3文章
166瀏覽量
24983
發(fā)布評論請先 登錄
相關(guān)推薦
熱點(diǎn)推薦
《機(jī)電工程技術(shù)》網(wǎng)絡(luò)首發(fā)論文
情況下,下一步系統(tǒng)構(gòu)成轉(zhuǎn)矩控制偏差,然后作為控制器的輸入傳遞到轉(zhuǎn)矩 PI 控制器,輸出得到 Vq 系統(tǒng)中得到的 Id入卡爾曼濾波后,在弱磁給
發(fā)表于 03-07 14:40
xgboost超參數(shù)調(diào)優(yōu)技巧 xgboost在圖像分類中的應(yīng)用
一、XGBoost超參數(shù)調(diào)優(yōu)技巧 XGBoost(eXtreme Gradient Boosting)是一種基于梯度提升決策樹(GBDT)的高效梯度提升框架,在機(jī)器學(xué)習(xí)競賽和實際業(yè)務(wù)應(yīng)
卡爾曼濾波基礎(chǔ)知識
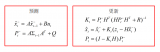
,給出當(dāng)前狀態(tài)的最優(yōu)估計,該算法涉及的核心方程有: 其中,xt為系統(tǒng)狀態(tài)矩陣;zt為系統(tǒng)觀測矩陣(實驗結(jié)果);A為狀態(tài)轉(zhuǎn)移矩陣;B為控制輸入矩陣;H為狀態(tài)觀測矩陣。 附2、卡爾曼濾波應(yīng)用實例
DFT在圖像處理中的作用 DFT在音頻信號處理中的應(yīng)用
處理中的幾個主要作用: 頻域濾波 :DFT允許我們分析圖像的頻率成分,從而可以設(shè)計濾波器來增強(qiáng)或抑制特定頻率的信號,例如低通
卡爾曼濾波在機(jī)器人導(dǎo)航中的應(yīng)用
,預(yù)測下一時刻的狀態(tài)和協(xié)方差。 更新步驟 :利用新的觀測數(shù)據(jù),調(diào)整預(yù)測狀態(tài),以減少誤差。 卡爾曼濾波的關(guān)鍵優(yōu)勢在于其遞歸性,這意味著它可以實時處理數(shù)據(jù)流,而不需要存儲整個觀測序列。 機(jī)

分析濾波器在信號處理中應(yīng)用
濾波器在信號處理中的應(yīng)用十分廣泛,其主要功能是從信號中去除不需要的頻率成分,保留所需的頻率成分,從而實現(xiàn)對信號的有效處理。以下是對
卡爾曼濾波器的特性及仿真
我們前一篇關(guān)于人物識別跟蹤的文章《視頻連續(xù)目標(biāo)跟蹤實現(xiàn)的兩種方法和示例(更新)》里講到,視頻圖像中物體的識別和跟蹤用到了卡爾曼濾波器(KF)

高斯濾波的特點(diǎn)有哪些
、背景)則相對保留。這種平滑處理有助于去除圖像中的噪聲,改善圖像質(zhì)量。 邊緣保留 : 與其他平滑濾波方法相比,高斯
濾波參數(shù)該如何選擇?
濾波參數(shù)的選擇是信號處理中至關(guān)重要的一步,它直接影響濾波效果和系統(tǒng)性能。以下是一些關(guān)于濾波參數(shù)選擇的建議: 一、明確需求 首先,需要明確
濾波參數(shù)tor對數(shù)字濾波結(jié)果的影響
在探討濾波參數(shù)tor對數(shù)字濾波結(jié)果的影響時,首先需要澄清一點(diǎn):在標(biāo)準(zhǔn)的濾波理論和技術(shù)文獻(xiàn)中,并沒
卡爾曼濾波的優(yōu)缺點(diǎn)有哪些
卡爾曼濾波(Kalman Filter)是一種線性動態(tài)系統(tǒng)的狀態(tài)估計算法,廣泛應(yīng)用于信號處理、導(dǎo)航、控制等領(lǐng)域。 卡爾





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論