 步進電機的控制實現方法
步進電機的控制實現方法

步進電機,作為一種將電脈沖信號轉換為相應角位移或線位移的電動機,是現代數字控制系統中不可或缺的重要組件。其工作原理基于電磁學原理,通過接收數字控制信號(電脈沖信號)并轉化為機械位移,步進電機能夠實現高精度的位置控制和速度控制。本文將詳細介紹步進電機的控制實現方法,包括基本的控制原理、常見的控制策略以及實際應用中的注意事項。

一、步進電機的基本控制原理
步進電機又稱為脈沖電機,其最大特點是每輸入一個脈沖信號,轉子就會精確地轉動一個固定的角度(步進角)或向前移動一個固定的距離。輸出的位移(角位移或線位移)與輸入的脈沖數成正比,轉速則與脈沖頻率成正比。這種特性使得步進電機非常適合需要精確位置控制和速度控制的場合,如3D打印、數控機床、機器人等。
步進電機的工作原理基于電磁鐵原理,通過改變電機線圈上的電脈沖順序、頻率和數量,可以實現對步進電機的轉向、速度和旋轉角度的精準控制。步進電機的控制系統通常包括脈沖信號發生器(如單片機、PLC等)、步進電機驅動器以及步進電機本身。脈沖信號發生器負責產生控制脈沖,步進電機驅動器則負責接收這些脈沖信號并控制步進電機的運行。
二、常見的步進電機控制策略
1. 單步控制方式
單步控制方式是步進電機最基本的控制方式,通過控制電機的相序來控制電機的轉動。每次輸入一個脈沖信號,電機就會轉動一定的角度。這種控制方式簡單直接,適用于對控制精度要求不高、只需要實現基本轉動功能的場合。
2. 微步控制方式
微步控制方式是在單步控制的基礎上發展而來的,它將每個步進電機的轉動角度分成更小的步驟,從而實現更精細的控制。通常情況下,微步控制方式可以將一個步進電機的轉動角度分成200或400個微步。這種控制方式能夠顯著提高電機的控制精度,減小轉動過程中的振動和噪音,適用于需要高精度定位和平穩運行的場合。
3. 矢量控制方式
矢量控制方式是一種復雜的步進電機控制方式,通過控制電機的電流和電壓來實現電機的轉動。這種控制方式能夠實現對電機轉矩和速度的精確控制,適用于高性能和可靠性要求高的應用。然而,矢量控制方式的實現相對復雜,需要精確的電機數學模型和復雜的控制算法。
4. 閉環控制方式
閉環控制方式是一種反饋控制方式,通過實時監測電機的轉動狀態并根據監測結果來調整控制信號,從而實現對電機的精確控制。這種方式能夠大大提高電機的控制精度和穩定性,適用于對控制精度要求極高的場合。然而,閉環控制方式的實現成本較高,且需要額外的傳感器和控制系統來支持。
5. 脈沖方向控制方式
脈沖方向控制方式是一種簡單的步進電機控制方式,通過控制電機的脈沖和方向信號來控制電機的轉動。這種方式通常用于一些簡單的應用場景,如打印機、POS機等。脈沖方向控制方式實現簡單、成本低廉,但控制精度相對較低。

三、步進電機控制實現中的注意事項
1. 驅動器選擇
步進電機驅動器是驅動步進電機運行的功率放大器,其性能直接影響到步進電機的控制精度和運行穩定性。在選擇驅動器時,需要根據步進電機的型號和規格來選擇合適的驅動器型號和參數。同時,還需要考慮驅動器的細分功能、電流控制能力等因素。
2. 脈沖信號發生器設置
脈沖信號發生器是步進電機控制系統的核心部件之一,負責產生控制脈沖。在設置脈沖信號發生器時,需要根據實際應用需求來設置脈沖的頻率、數量和方向等參數。同時,還需要考慮脈沖信號發生器的穩定性和可靠性等因素。
3. 電機參數匹配
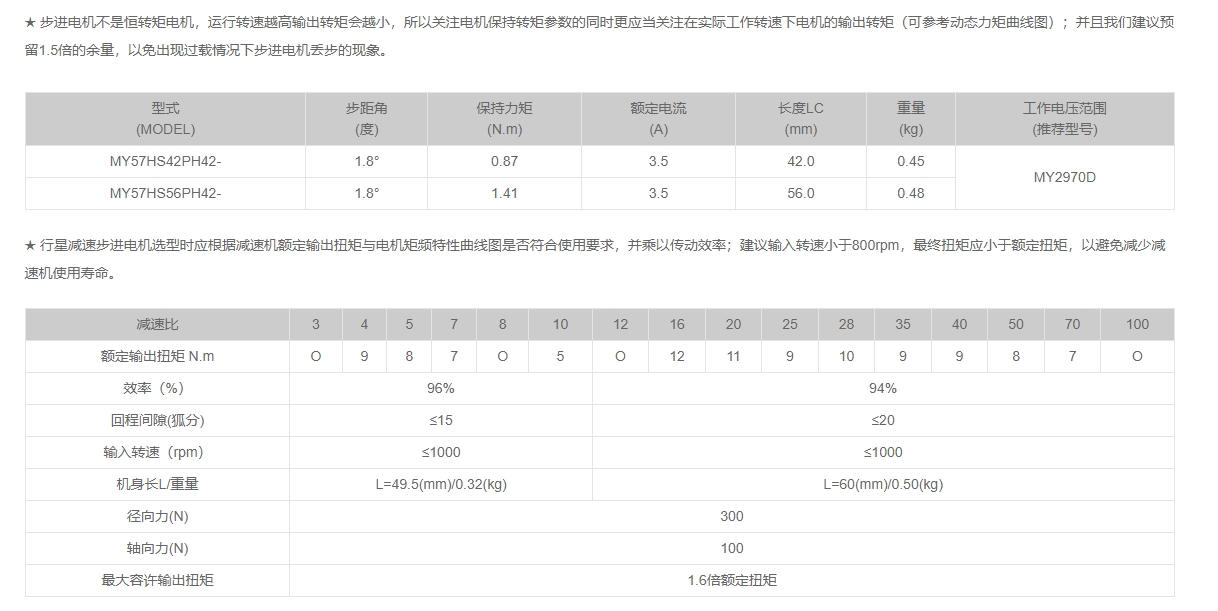
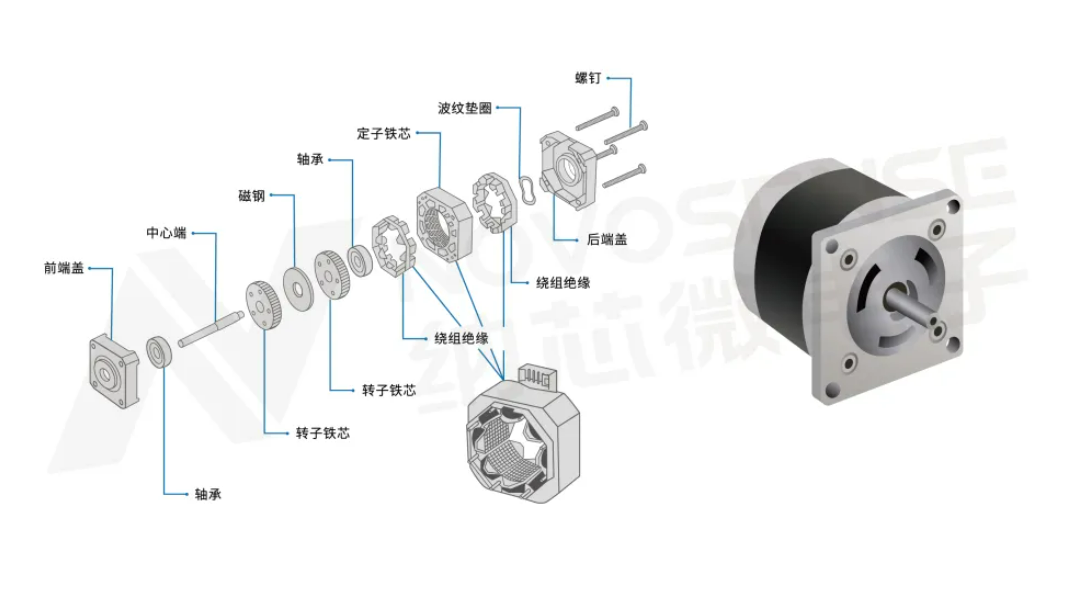
步進電機的參數包括步距角、相數、線數等,這些參數直接影響到電機的控制精度和運行性能。在選擇步進電機時,需要根據實際應用需求來選擇合適的電機型號和規格。同時,還需要考慮電機的負載能力、轉動慣量等因素,以確保電機能夠穩定可靠地運行。
4. 加減速控制
步進電機的轉速取決于脈沖頻率,而電機的輸出力矩隨著脈沖頻率的上升而下降。因此,在啟動或加速時,如果步進脈沖變化太快,轉子由于慣性而跟隨不上電信號的變化,可能會產生堵轉或失步現象。為了防止這種情況的發生,需要對步進電機進行加減速控制。加減速控制可以通過設置合理的加速和減速時間來實現,以確保電機能夠平穩地啟動和停止。
5. 振動與噪音控制
步進電機在高速運行時可能會產生振動和噪音問題。這些問題主要是由于電機結構上的固定誤差和電感影響等因素引起的。為了減小振動和噪音,可以采取多種措施,如采用細分的驅動模式、調整電機的相電流比、優化電機的結構設計等。

四、步進電機控制實現的實際應用
步進電機廣泛應用于各種領域,如打印機、POS機、醫療器械和自助售賣機等。在家電中,小電流步進電機常用于恒壓控制;而在工業自動化中,則采用專用驅動器進行控制。以數控機床為例,數控機床需要實現高精度的定位和加工功能,步進電機作為其關鍵部件之一,其控制精度和穩定性直接影響到數控機床的加工精度和效率。通過采用微步控制方式和閉環控制方式等先進的控制策略,可以實現對步進電機的精確控制,從而提高數控機床的加工精度和效率。
此外,步進電機還廣泛應用于機器人領域。機器人需要實現復雜的運動控制和軌跡規劃功能,步進電機作為其驅動部件之一,其控制精度和響應速度直接影響到機器人的運動性能和穩定性。通過采用高性能的步進電機驅動器和先進的控制算法,可以實現對步進電機的精確控制和快速響應,從而提高機器人的運動性能和穩定性。
綜上所述,步進電機的控制實現方法多種多樣,包括單步控制方式、微步控制方式、矢量控制方式、閉環控制方式以及脈沖方向控制方式等。在實際應用中,需要根據具體應用需求和電機性能來選擇合適的控制策略和控制參數。同時,還需要注意驅動器選擇、脈沖信號發生器設置、電機參數匹配、加減速控制以及振動與噪音控制等方面的問題,以確保步進電機能夠穩定可靠地運行并實現高精度的位置控制和速度控制。可靠地運行并實現高精度的位置控制和速度控制。
審核編輯 黃宇
-
步進電機
+關注
關注
152文章
3166瀏覽量
149764 -
信號
+關注
關注
11文章
2853瀏覽量
78299 -
電脈沖
+關注
關注
0文章
12瀏覽量
8534
發布評論請先 登錄

行星減速步進電機與步進電機的區別

步進電機如何自適應控制?步進電機如何細分驅動控制?
步進電機如何在加減速過程中控制技術?
步進電機轉速怎么控制高低
步進電機的控制技術及發展概況有哪些?

兩分鐘帶你了解步進電機控制的方法
AMEYA360:納芯微高集成單芯片SoC如何高效智能控制車載步進電機?
基于NSUC1610的步進電機控制原理及其實際應用






 工商網監
工商網監
評論