") 機器人領(lǐng)域的變革和創(chuàng)新改變了工廠和倉庫,生活也悄然發(fā)生著變化
機器人領(lǐng)域的變革和創(chuàng)新改變了工廠和倉庫,生活也悄然發(fā)生著變化
導 讀
多年以來,機器人領(lǐng)域的變革和創(chuàng)新改變了工廠和倉庫,它們在受控環(huán)境中表現(xiàn)良好,通常不會進入大眾的視野。
哈佛大學的科學家們,正在推動機器進入新的時代,這群研究人員新的目標是普羅大眾,他們認為科技所有的改變,意在為更多領(lǐng)域、更多普通人帶來變革性影響。
“科幻小說已經(jīng)描繪了50年,怎么這些機器人還沒出現(xiàn)在人們身邊?”工程和應(yīng)用科學教授RobertWood說。
你的想象中,現(xiàn)實世界的機器人,是否是這樣的場景?
你在網(wǎng)上購買的商品,會由無人機負責配送;你購買的汽車,會自動開到目的地;你不愿意干的家務(wù),會有一個機器人幫你收拾打理;更多的場景里,機器人還能幫助搜救災(zāi)民和種植糧食。
所有這夢幻般的一切,已經(jīng)在悄悄上演。
下面這些你不曾想象過的機器人,都來自哈佛的研究團隊。一篇很有想象力的文章分享給熱愛新事物的你們,Enjoy it。
原作:Alvin Powell唐旭 夏乙 編譯整理量子位 出品 | 公眾號 QbitAI
下一代機器人將廣泛進入現(xiàn)實世界,穿過森林和田野,到達城鎮(zhèn)和家庭。你在網(wǎng)上購買的商品,會由無人機負責配送;你購買的汽車,會自動開到目的地;你不愿意干的家務(wù),會有一個機器人幫你收拾打理。
當然不止這些。機器人還能幫助搜救災(zāi)民,幫助種植糧食,會在軍中服役,會在醫(yī)院至于你的心靈,成為你身體的一部分。
所有這夢幻般的一切,已經(jīng)在悄悄上演。
下面這些你不曾想象過的機器人,都來自哈佛的研究團隊。
動力
哈佛大學最近在機器人方面的工作讓一項在歷史上沉寂多時的研究重煥生機。George Whitesides教授稱,他在軟體機器人研究方面取得的突破,與哈佛大學在軟物質(zhì)物理學方面的力量,以及同事們在微流體上的研究密切相關(guān)。
一部分在軟體機器人方面的早期工作,是在上世紀90年代由日本科學家完成的。而最近,由Whitesides、Wood和Conor Walsh等人做出的創(chuàng)新推動力整體領(lǐng)域的進步,使得機器人有望實現(xiàn)從設(shè)計和特性上對運動進行控制,而不是從齒輪和杠桿上。
“我們用材料的某些特性來代替控制裝置。”Whitesides拿著一種海星形狀的橡膠夾手說,當有空氣進入手臂,夾手就會自動夾緊。“這些東西有一種從頂端卷曲的傾向——而這是可控的。原本,若是沒有硬體機器人身上的那些部件,要實現(xiàn)這種效果幾乎是不可能的。”
由此誕生的機器人甚至可以被一輛車碾過而在功能上毫發(fā)無傷。這也促成了在全新的制造技術(shù)方面的一些研究,比如威斯生物工程研究所教授Jennifer Lewis實驗室在3D打印方面的工作。類似的成果,還有同《國家地理》雜志合作的,能在水下收集脆弱珊瑚的抓取機器人;以及商業(yè)機器人公司Soft Robotics開發(fā)的,能在農(nóng)場、倉庫、裝配線等場景下抓取各種產(chǎn)品的靈活機器手。
“(將這些技術(shù))轉(zhuǎn)向市場的過程很有趣。”Whitesides說。“最初成型的應(yīng)用針對的那些領(lǐng)域,我一開始并不知道還存在著問題。結(jié)果它們商業(yè)化的速度并我所參與過的所有項目都快。”
補充說一下這個氣動、完全不受限制的移動式軟體機器人。
這個機器人使用了由有機彈性體、聚芳酰胺織物和空心玻璃微珠組成的復合材料制造,配有一個微型空氣壓縮機、電池、閥門和控制器。
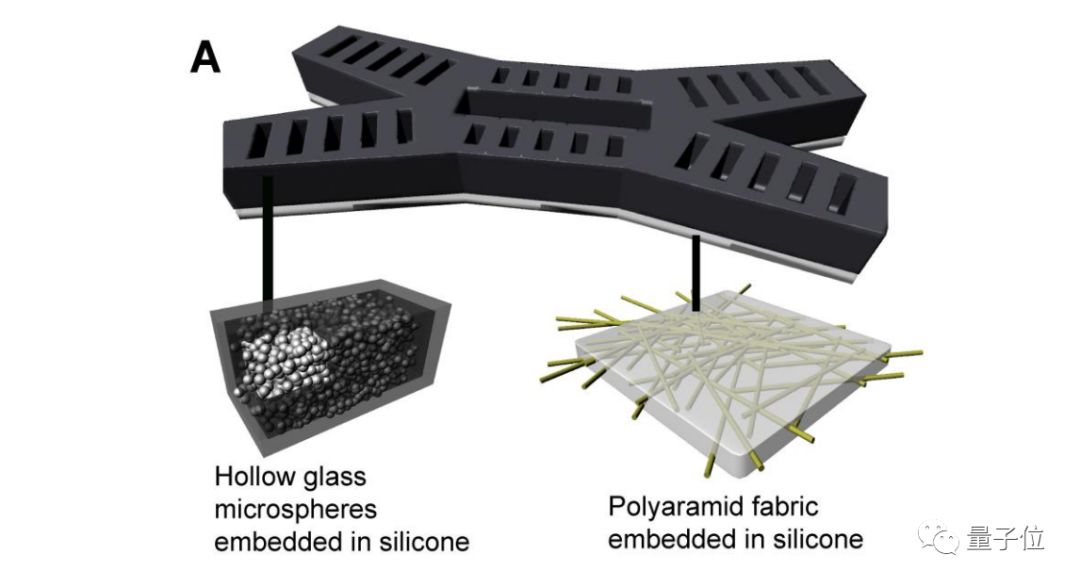
這種硅膠機器人不透水、有良好的酸堿穩(wěn)定性,抗沖擊/壓迫能力強,在積雪、積水、火燒、車碾等惡劣環(huán)境下,這個機器人都能一往無前、不可阻擋。
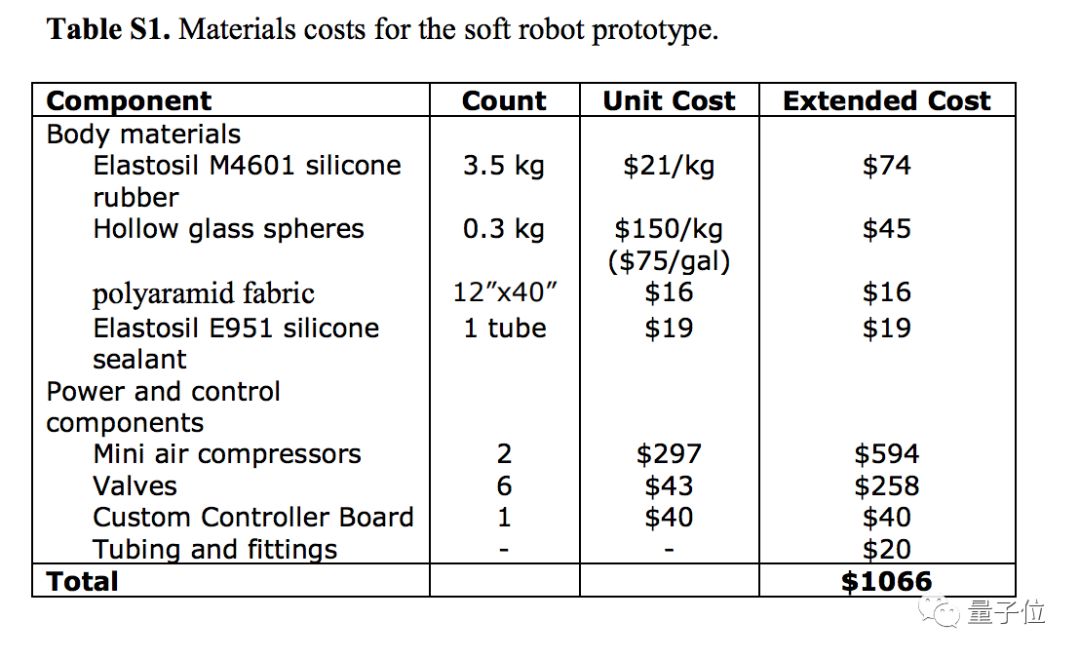
而且價格低廉,成本如下圖所示。
當然這種機器人也不是完美的。例如對大孔洞敏感、容易被尖銳物體撕裂、控制精度和運動能力不足、速度緩慢。想提速,只能搭配提及更大的空氣壓縮機。
更多細節(jié),在這個頁面:
https://dash.harvard.edu/bitstream/handle/1/16920697/21340991.pdf
哈佛大學技術(shù)發(fā)展辦公室戰(zhàn)略合作伙伴關(guān)系執(zhí)行主任Sam Liss表示,在對于哈佛機器人研究進展的評估方面,類似Soft Robotics這樣的公司提供了一種相對直接的標準。
“創(chuàng)業(yè)公司出現(xiàn)的速度非常驚人。”他說,“在過去幾年內(nèi),我們就已經(jīng)看到了Soft Robotics、 RightHand Robotics和Root Robotics等等——對于哈佛而言,這是非常重大的轉(zhuǎn)變。它不僅強調(diào)了科研的重要意義,還代表著我們的同事在將技術(shù)產(chǎn)品化的過程中所付出的努力。”
哈佛大學在機器人研究方面的發(fā)展,主要由保爾森工程與應(yīng)用科學學院和威斯生物工程研究所驅(qū)動。研究者稱,在機器人制造工具和設(shè)備領(lǐng)域更深層次的投入,對于教師、學生和研究院們都產(chǎn)生了重大影響。
“特別是對于我從事的工作來說,讓學生和博士后們能夠用上這些工具非常重要。”Wood說,“工程與應(yīng)用科學學院和生物工程研究所在一些領(lǐng)域的投入上做得非常不錯。這么看其實我們什么都不缺。”
團隊協(xié)作
哈佛有一個由不到十二位機器人專家組成的核心部門,部門內(nèi)部的科學家會定期合作,甚至彼此依賴各自的專長。研究的重點包括能在陸地、海洋和空中與人類緊密合作的機器人——通常是用于醫(yī)療。
“我們制造人們從未想象過的那種機器人。”計算機科學教授Radhika Nagpal說,“像是會飛的小蜜蜂,甚至是你能穿在身上的機器人。從某種程度上說,我們創(chuàng)造的機器人是狂野的,它們更像是動物,而不是四輪汽車。”
其中一個例子是RoboBee,由Wood開發(fā),Nagpal的軟件負責控制。這種蟲子般大小的、會飛的機器人在調(diào)查勘探方面有非常大的潛力:它能夠從自然災(zāi)害、作物病害甚至戰(zhàn)爭地區(qū)中收集圖像和數(shù)據(jù),小到不包含任何機械杠桿、齒輪。設(shè)計制造這種機器人需要的專業(yè)技術(shù)已經(jīng)來到了機器人設(shè)計領(lǐng)域之外。
“對于RoboBee而言,沒有任何現(xiàn)成的部件。”Wood說,“我們必須從頭開始:全新的制造方法、全新的動作、感知、計算架構(gòu)、全新的能源存儲;對于Radhika而言,則是控制行為的全新算法。我們工作的平臺都需要從頭搭建。”
Wood還表示,RoboBee身上的傳感器和執(zhí)行器可能會在某些生物醫(yī)學裝置和微創(chuàng)手術(shù)上起到作用,因為在這類工作中,尺寸是一個非常重要的因素。
“我們談?wù)摰氖菑腞oboBee上發(fā)展出的所有技術(shù),將它們同軟體機器人結(jié)合來創(chuàng)造全新的工具,這些工具可以用于內(nèi)窺鏡檢查這類復雜、精細的工作。”
這里提到的RoboBee是哈佛團隊研發(fā)的微型機器人。RoboBee不但能夠飛行、潛水、游泳,還能從水面彈射而起,并且安全在地面降落。
對于毫米級的機器人來說,能夠在空中和水中飛行有很多挑戰(zhàn)。比方水的密度比空氣大1000倍,因此兩種介質(zhì)中翅膀拍打的速度相差很大。最后的實驗結(jié)果是,空中飛行時翅膀拍打頻率220-300Hz、水中潛行時9-13Hz。
微型機器人的另外一個挑戰(zhàn)是,水的表面張力是RoboBee重量的十倍以上。怎么才能從水面躍出?為解決這個問題,首先是給RoboBee加裝四個浮力支腿,以及一個創(chuàng)造性的解決方案。
一旦RoboBee浮到水面,中央集氣室中的電解板就會把水轉(zhuǎn)化為可燃氣體氫和氧,然后點火引燃把機器人推離水面。不過目前的技術(shù),還無法做到RoboBee出水后立即恢復飛行,研究團隊正在為此而努力。
更多細節(jié),可以查看這個頁面:
https://www.seas.harvard.edu/news/2017/10/new-robobee-flies-dives-swims-and-explodes-out-of-water
工程與應(yīng)用科學學院副教授Walsh稱,醫(yī)療機器人的一大吸引力在于它們能夠?qū)τ谌藗兊纳a(chǎn)生積極影響。Walsh所在實驗室開發(fā)的軟體機器護甲可以幫助中風病人更輕松地行走。在哈佛醫(yī)學院及附近的16家附屬醫(yī)院和研究機構(gòu),機器人專業(yè)的老師處于非常重要的位置,他們要判斷機器人是否能滿足病人的需求,并與內(nèi)科醫(yī)生合作,制定運動方面的解決方案。
比如,在美國國家衛(wèi)生研究院支持的一項工作中,Howe和哈佛大學附屬波士頓兒童醫(yī)院小兒心臟外科的生物工程學主任Pierre Dupont就在一像用于不停跳心臟手術(shù)的機器人技術(shù)上進行了多年合作。他們目前正在研究用機器導管來補償心臟跳動動作的補充途徑,這項研究的成功將能夠用微創(chuàng)操作令病人避開心臟直視手術(shù)。
“這對于病人來說就好多了——更小的創(chuàng)傷、更低的風險。”Dupont說,“我們在努力開發(fā)臨床醫(yī)生們做夢都想不到的技術(shù)。”
同時,Walsh的exosuit柔性外骨骼技術(shù)已經(jīng)授權(quán)給了ReWalk機器人公司,這家公司計劃今年將它投入臨床試驗,邁出讓這種機器五年從概念走向市場的第一步。
Walsh說:“我發(fā)現(xiàn)我們所做的事情有各種真正改變?nèi)藗兩畹臋C會。”
他的工作在醫(yī)療上有著各種各樣的應(yīng)用,比如防止心臟衰竭,幫脊髓損傷患者增強手臂功能、提高中風后的運動能力等等。這些應(yīng)用,都離不開美國國防部先進研究項目局(DARPA)的早期支持,他們本來的目標,是要用外骨骼來減輕100磅行軍裝備給士兵的負擔。
軟性外骨骼將功能性服裝的特性,與精確布置的線纜和電機結(jié)合起來,有效地幫助穿著者移動。
“使用柔性系統(tǒng)能讓系統(tǒng)很輕,沒有限制性,在行走時對人類的生物力學影響最小,同時能在穿著者肌肉動作的基礎(chǔ)上做出提升。”Walsh介紹說:“問題是,我們能對一個人的移動性產(chǎn)生積極影響嗎?”
目前,跑步機和數(shù)英里行軍測試的結(jié)果顯示,柔性外骨骼的影響大概有15%。另外,Walsh的團隊在中風病人身上的實驗表明,外骨骼能幫助使用者抬腳離地、運動腳踝,減少肢體之間的功能性不對稱,提高行走效率。
這套外骨骼系統(tǒng)要繼續(xù)進化,面臨的主要挑戰(zhàn)是盡可能降低重量,最大限度地提供幫助,以及讓外骨骼盡可能與自然運動同步。
行為問題
和機器如何運動同等重要的,是它怎樣思考,哈佛的科學家們也在認真思考這個現(xiàn)實。工程和計算機科學助理教授、哈佛敏捷機器人實驗室(Harvard Agile Robotics Lab)主任Scott Kuindersma將他的目光投向了控制系統(tǒng)的完善,想由此讓機器人實現(xiàn)全部潛力。
“我認為,機器人在物理上的能力已經(jīng)夠用了,但它們想要實現(xiàn)動態(tài)極限的性能還很難,也缺少在現(xiàn)實環(huán)境中完成任務(wù)所需的穩(wěn)健性。問題主要在于計算。”Kuindersma說
Kuindersma所在實驗室最新的成果是雙足行走機器人Cassie,它長得有點像鴕鳥,由Agility Robotics設(shè)計。Cassie是Kuindersma認為該具備更好性能的硬件典型。
Cassie來自Agility Robotics,這個機器人堪稱脖子以下全是腿,以模仿人類步態(tài)的方式移動。
與早先的雙足機器人ATRIAS相比,Cassie可謂是全方位的升級,尺寸有了顯著的縮小。特別是在電池、腿部設(shè)計和計算能力方面,都有顯著改進,這讓Cassie更加靈活。Agility Robotics為這個機器人自行設(shè)計了鋰電池組作為電源。
Cassie的臀部有三個自由度,跟人類一樣,所以這個機器人可以前后移動自己的腿、從一邊到另一邊、還能同時轉(zhuǎn)動。Cassie也配備了電動的腳踝,所以能夠站在原地不動,而不需像常見的雙足機器人一樣得不斷移動雙腳。
未來這種機器人,可以把技術(shù)共享給搜救、外骨骼等機器人領(lǐng)域,不過Agility Robotics想讓這種機器人主要去干快遞……
Kuindersma說:“[Cassie]用的控制軟件是他們公司開發(fā)的,我們會刪除替換它。我們的目標是把Cassie用作實驗平臺,開發(fā)出推進運動性能超越目前頂尖水平的算法。對于我們來說,借助高速視覺傳感器反饋來規(guī)劃動態(tài)行走,演示戶外高速運動會是一個重要里程碑。”
“想想山羊,”他說,“它們能爬上懸崖峭壁,在復雜的地形中迅速決定該把腳放在哪。我們想構(gòu)建一種算法,讓機器人也能實現(xiàn)這樣的能力。”
Kuindersma探索著如何更好地控制復雜個體行為,而Nagpal的研究剛好反過來:如何驅(qū)動簡單個體組成的群體,實現(xiàn)復雜行為。
Nagpal說:“我的實驗室的主題一直是通過簡單實現(xiàn)復雜。無論是哪一類智能體——螞蟻、人、機器人——個體所能做的事情總是有限的,我們通過組成團隊來超越這個限制。已經(jīng)進化到組團工作的動物可以利用這些東西。”
從納米比亞白蟻合作堆土堆的行為中受到啟發(fā),Nagpal發(fā)現(xiàn)了一種模式,社會化昆蟲能在沒有中央?yún)f(xié)調(diào)的情況下處理具有挑戰(zhàn)性的任務(wù)。
“自然界中有一些不需要多少協(xié)調(diào)的例子,我們正在用這些方法,”Nagpal說,“這就為多個部分的合作提供了可能性。這些部分不用很復雜,它們之間的協(xié)調(diào)也不用很復雜,你還是可以實現(xiàn)復雜的目標。”
小型kilobot就是Nagpal開發(fā)的一種機器,這種機器人依照簡單的原則來行動,例如鄰居的位置和行為。一群kilobot聚集起來,可以完成復雜的任務(wù),比如說它們在某次展示中組成了海星形狀。
這些任務(wù)都不依賴復雜的計算機大腦,也沒有領(lǐng)導者-追隨者系統(tǒng),她的團隊還在白蟻的啟發(fā)下開發(fā)了一種機器人,能協(xié)作搭建用戶指定的結(jié)構(gòu)。
Nagpal說:“我們可以制定規(guī)則,讓它們總是構(gòu)建正確的結(jié)構(gòu),而用到的機器人是5個10個還是50個都沒關(guān)系,每個機器人不知道其他機器人在哪,它們的順序也無關(guān)緊要。”
她認為,這些機器人與環(huán)境傳感器配合,在災(zāi)難響應(yīng)和勘探上都有著應(yīng)用潛力。遵循簡單的規(guī)則,機器人可以建起沙袋墻,她的實驗室還正在開發(fā)一種廉價的機器魚,將來可以用來探測海底,對于價格昂貴又每次只能探測一個地方的潛水器來說,可能會成為一種補充或替代。
kilobot的發(fā)展是技術(shù)快速進步的結(jié)果,這種進步不僅提升了前沿系統(tǒng)的復雜性,也大大降低了現(xiàn)成組件的價格。
“我本以為我永遠不會有硬件可用,不過我這么想的原因是一個機器人就要花掉10萬美元。”Nagpal說,“[現(xiàn)在]我做一個新機器人只需要幾百刀,在我的實驗室里,這就是一種日常。我還有一千個機器人,每個只需要20刀。”
她將kilobot技術(shù)授權(quán)給了小型移動機器人制造商K-Team,現(xiàn)在,全球還有10個實驗室有kilobot,其中兩個擁有1000只機器人的集群。
“這真是太神奇了,人們可以用kilobot系統(tǒng)實現(xiàn)想象,做各種各樣我根本想不到的事情。現(xiàn)在,這是一個充滿活力的研究領(lǐng)域。”Nagpal 說。
Kilobot整套系統(tǒng),其實是研究團隊進行的一次群體機器人算法測試。如果你想更多了解這方面的理論研究,可以看看下面這篇論文:
Kilobot: A Low Cost Scalable Robot System for Collective Behaviorshttp://www.eecs.harvard.edu/ssr/papers/icra12-rubenstein.pdf
但是這套成本低廉的系統(tǒng),能力卻一點不差,包括差分驅(qū)動能力、機載計算能力、相鄰通訊和距離感知能力、環(huán)境光感能力等等。
而且哈佛大學的團隊,還對這套系統(tǒng)進行了開源。
所以如果你對這套系統(tǒng)感興趣,可以使用任何平臺(Mac、Windows、Linux)進行編程。至于硬件部分,你可以買也可以自己搭建。
主要部件:1、3.7伏電池 2、電源跳線 3、振動電機 4、三色LED 5、環(huán)境光傳感器 6、串行輸出接頭 7、直接編程接口 8、充電標簽 9、紅外發(fā)射器 10、紅外接收器
kilobot機器人需要在光滑平坦的表面上運作,現(xiàn)成的白板其實就挺好。
-
機器人
+關(guān)注
關(guān)注
213文章
29559瀏覽量
211908 -
飛行機器人
+關(guān)注
關(guān)注
0文章
21瀏覽量
9094
原文標題:腦洞 | 哈佛機器人研究全景圖:超越想象,完爆科幻
文章出處:【微信號:xinghehulian,微信公眾號:星河互聯(lián)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
明遠智睿SSD2351開發(fā)板:語音機器人領(lǐng)域的變革力量
NVIDIA推出適用于機器人的OpenUSD資產(chǎn)結(jié)構(gòu)管線

【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】機器人入門的引路書
網(wǎng)線在機器人領(lǐng)域如何發(fā)揮重要作用
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產(chǎn)品
工業(yè)設(shè)施數(shù)字孿生中的機器人仿真

德州儀器半導體技術(shù)引領(lǐng)機器人領(lǐng)域創(chuàng)新
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統(tǒng)」閱讀體驗】1.初步理解具身智能
協(xié)作機器人TM25S:高效人機協(xié)作改變傳統(tǒng)作業(yè)方式

印度機器人公司使用NVIDIA技術(shù)推動全球創(chuàng)新
MT6701 磁編碼 IC 在機器人輪轂領(lǐng)域的璀璨華章
精準定位,深度清潔:揭秘工廠清潔機器人的核心技術(shù)
從塵埃到潔凈:工廠清潔機器人的日常使命與成就
復合機器人倉庫搬運方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論