") 手搓網(wǎng)球撿拾機(jī)器人:RDK X3帶你輕松解鎖球場(chǎng)黑科技
手搓網(wǎng)球撿拾機(jī)器人:RDK X3帶你輕松解鎖球場(chǎng)黑科技

一、項(xiàng)目介紹:
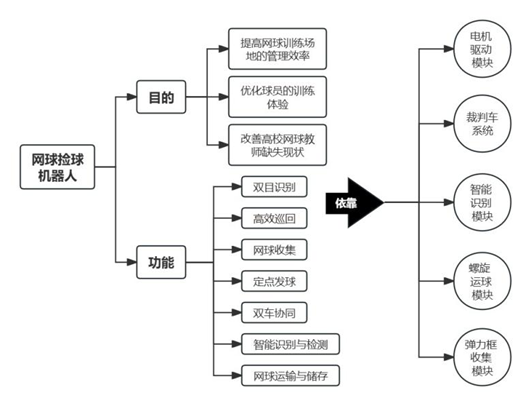
本項(xiàng)目致力于打造一款智能網(wǎng)球撿發(fā)服務(wù)型機(jī)器人,幫助提升網(wǎng)球場(chǎng)上的撿球效率,讓運(yùn)動(dòng)員專注訓(xùn)練的同時(shí),減少人工成本。機(jī)器人將具備自主撿球、精準(zhǔn)發(fā)球和智能定位等核心功能,讓撿球變得更高效、更聰明!——蘭州交通大學(xué)-無(wú)盡妙想云團(tuán)隊(duì)
二、研究重點(diǎn):
聰明規(guī)劃,精準(zhǔn)定位
我們采用麻雀算法優(yōu)化柵格地圖,讓機(jī)器人能以最短路徑迅速穿梭球場(chǎng),靈活避開(kāi)障礙物,提高撿球效率。同時(shí),結(jié)合AMCL(自適應(yīng)蒙特卡洛定位)算法,減少因定位誤差導(dǎo)致的地圖失真風(fēng)險(xiǎn)。為了讓機(jī)器人在完全未知的環(huán)境中也能游刃有余,我們研究SLAM算法,使其在移動(dòng)過(guò)程中實(shí)時(shí)構(gòu)建地圖并精準(zhǔn)定位自身位置,讓“迷路”成為過(guò)去式!
撿球快、準(zhǔn)、穩(wěn),發(fā)球一氣呵成
依托國(guó)產(chǎn)軟硬件平臺(tái),我們將主流目標(biāo)檢測(cè)算法與ROS機(jī)器人操作系統(tǒng)結(jié)合,實(shí)現(xiàn)撿球與發(fā)球一體化智能運(yùn)作。在機(jī)械結(jié)構(gòu)方面,采用創(chuàng)新型收球框+絲桿傳輸系統(tǒng),確保網(wǎng)球被精準(zhǔn)收集后,順暢地輸送至螺旋上升裝置。這套巧妙的設(shè)計(jì)讓機(jī)器人邊移動(dòng)邊高效撿球,無(wú)需停頓,實(shí)時(shí)鎖定目標(biāo),確保每一次撿球又快又準(zhǔn)!
打造智能模型,自動(dòng)駕駛演示
組裝全新智能網(wǎng)球機(jī)器人,并搭載自動(dòng)駕駛功能,讓它真正“活”起來(lái)!我們將對(duì)機(jī)器人進(jìn)行動(dòng)態(tài)演示,全面測(cè)試其在球場(chǎng)上的智能表現(xiàn),確保它能夠穩(wěn)健執(zhí)行撿球與發(fā)球任務(wù)。
升級(jí)輪式運(yùn)動(dòng)控制,讓機(jī)器人更聰明
傳統(tǒng)PID控制算法已經(jīng)過(guò)時(shí)?沒(méi)關(guān)系,我們來(lái)優(yōu)化!采用分層控制策略,在縱向控制中加入RBF神經(jīng)網(wǎng)絡(luò),賦予機(jī)器人自學(xué)習(xí)能力,讓它能自主優(yōu)化運(yùn)動(dòng)軌跡,提高控制精度。同時(shí),搭配OpenMV攝像頭實(shí)時(shí)監(jiān)測(cè)路況,編碼器電機(jī)精準(zhǔn)測(cè)速,超聲波雷達(dá)反饋周圍距離信息,讓機(jī)器人在復(fù)雜環(huán)境中依然能夠靈活穿梭,穩(wěn)定撿球!
三、特色與創(chuàng)新
3.1.1機(jī)器視覺(jué)與自主巡航:精準(zhǔn)鎖定網(wǎng)球
本項(xiàng)目聚焦機(jī)器視覺(jué)與自主巡航技術(shù)的融合,賦予機(jī)器人精準(zhǔn)的網(wǎng)球定位能力,讓它不僅能“看見(jiàn)”網(wǎng)球,還能聰明地追蹤并拾取。
如何做到精準(zhǔn)定位?
慧眼識(shí)球 ——機(jī)器人搭載訓(xùn)練好的視覺(jué)模型,利用**卷積神經(jīng)網(wǎng)絡(luò)(CNN)**等算法,精準(zhǔn)識(shí)別網(wǎng)球的形狀、顏色和位置,確保不會(huì)錯(cuò)過(guò)任何一個(gè)球!
實(shí)時(shí)追蹤 ——機(jī)器視覺(jué)系統(tǒng)能夠持續(xù)鎖定網(wǎng)球軌跡,分析其位置、速度和加速度,提前預(yù)測(cè)球的落點(diǎn),讓機(jī)器人行動(dòng)更快、更精準(zhǔn)。
深度學(xué)習(xí)賦能 ——結(jié)合深度學(xué)習(xí)技術(shù),機(jī)器人能更聰明地理解球的運(yùn)動(dòng)模式,提高識(shí)別穩(wěn)定性,面對(duì)復(fù)雜環(huán)境也能游刃有余。
自主巡航 ——機(jī)器人根據(jù)視覺(jué)信息和傳感器數(shù)據(jù),自主規(guī)劃路徑,靈活避障,始終保持在最佳位置,確保高效撿球。
智能反饋控制 ——機(jī)器人通過(guò)持續(xù)獲取視覺(jué)反饋,動(dòng)態(tài)調(diào)整自身位置與移動(dòng)策略,做到精準(zhǔn)鎖定、快速響應(yīng)。
3.1.2輪式機(jī)器人運(yùn)動(dòng)控制:多傳感器融合,精準(zhǔn)操控
輪式機(jī)器人在復(fù)雜環(huán)境中運(yùn)動(dòng),受非線性和時(shí)變因素影響,單靠單一傳感器難以精準(zhǔn)掌控。為此,我們采用多傳感器融合技術(shù),讓機(jī)器人具備更強(qiáng)的環(huán)境感知與決策能力。
通過(guò)整合多種傳感器數(shù)據(jù),機(jī)器人能全方位感知周圍環(huán)境,實(shí)時(shí)監(jiān)測(cè)自身狀態(tài),確保運(yùn)動(dòng)控制既精準(zhǔn)又穩(wěn)定,讓它在球場(chǎng)上行動(dòng)自如,靈活應(yīng)對(duì)各種挑戰(zhàn)!
3.1.3 3D打印賦能:快速打造智能機(jī)器人
本項(xiàng)目使用SolidWorks建模,自主設(shè)計(jì)輪式機(jī)器人遙控器外殼、車身結(jié)構(gòu)及螺旋柱框架,并借助3D打印技術(shù)將設(shè)計(jì)變?yōu)楝F(xiàn)實(shí)。
結(jié)合鋁型材、中空鋼管等金屬材料,完成機(jī)器人框架、螺旋柱和物料盤的組裝。3D打印不僅滿足復(fù)雜形態(tài)與尺寸定制需求,還大幅提升制造精度與效率,讓機(jī)器人更輕盈、更堅(jiān)固、更智能!
3.1.4融合PCB制版技術(shù)助力實(shí)物制造
本項(xiàng)目對(duì)輪式機(jī)器人遙控器的PCB電路部分進(jìn)行了自主設(shè)計(jì)和制版,并進(jìn)行了樣板打樣。這種集成PCB技術(shù)的遙控器具有多項(xiàng)優(yōu)勢(shì):
電氣性能優(yōu)化: 自主設(shè)計(jì)的PCB確保了電路布局精確,消除了電氣干擾,提高了遙控器的可靠性和安全性。
集成度提升: 集成度高,減少了外部組件,優(yōu)化了體積和重量,使遙控器更加緊湊、輕便,便于攜帶和操作。
易用性: 自主設(shè)計(jì)無(wú)需額外學(xué)習(xí),降低了用戶的使用門檻,提升了易用性。
該遙控器的設(shè)計(jì)不僅在輪式機(jī)器人控制中取得成功,也為其他機(jī)器人控制領(lǐng)域提供了借鑒,預(yù)計(jì)隨著技術(shù)的進(jìn)步,能夠在更廣泛的領(lǐng)域得到推廣應(yīng)用。
3.1.5雙模式控制適應(yīng)復(fù)雜環(huán)境
- 自動(dòng)模式: 機(jī)器人采用全局遍歷算法,通過(guò)攝像頭和超聲波傳感器信息,避開(kāi)障礙物(如運(yùn)動(dòng)員和防護(hù)網(wǎng)),確保正常訓(xùn)練,并通過(guò)算法遍歷場(chǎng)地,完成網(wǎng)球的收集。
- 手動(dòng)模式: 通過(guò)遙控器控制機(jī)器人行進(jìn),適用于復(fù)雜區(qū)域或突發(fā)情況,采用NRF模塊和Barsa板,以確保在干擾較大時(shí)機(jī)器人能夠正常工作。
3.2創(chuàng)新點(diǎn)
3.2.1依托人工智能算法,實(shí)現(xiàn)自動(dòng)巡回功能
采用人工智能算法優(yōu)化機(jī)器人行為,分析周圍環(huán)境數(shù)據(jù),自主構(gòu)建策略庫(kù),選擇最佳路徑,避免繞行,提高工作效率。同時(shí),機(jī)器人綜合考慮任務(wù)優(yōu)先級(jí)和能源消耗,減少人工干預(yù),降低巡回成本。
3.2.2激光雷達(dá)自主巡航技術(shù)提升安全性與穩(wěn)定性
引入激光雷達(dá)傳感器實(shí)現(xiàn)自動(dòng)避障,實(shí)時(shí)監(jiān)測(cè)環(huán)境,確保機(jī)器人在復(fù)雜環(huán)境中安全穩(wěn)定運(yùn)行。機(jī)器人能夠根據(jù)環(huán)境變化自動(dòng)調(diào)整,避開(kāi)障礙物并繼續(xù)工作,提高了安全性和穩(wěn)定性。
3.2.3采用絲桿與彈力框網(wǎng)球拾取方式
相比傳統(tǒng)的機(jī)械臂拾取方式,本項(xiàng)目采用絲桿與彈力框技術(shù),降低了維護(hù)成本,并提高了拾球效率。絲桿技術(shù)減少機(jī)械部件的損耗,彈力框使機(jī)器人能靈活移動(dòng),適應(yīng)不同的任務(wù)環(huán)境,適合預(yù)算有限的用戶。
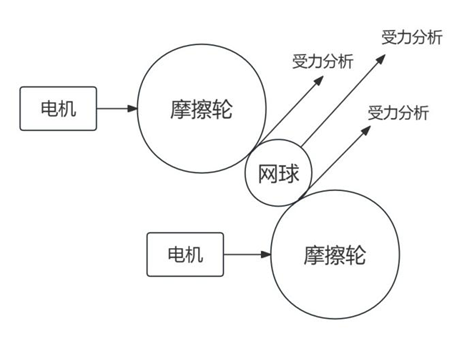
3.2.4電動(dòng)摩擦輪發(fā)球技術(shù):精準(zhǔn)高效,穩(wěn)定發(fā)射
本項(xiàng)目采用雙伺服電機(jī)驅(qū)動(dòng)的旋轉(zhuǎn)摩擦輪,打造高效穩(wěn)定的網(wǎng)球發(fā)射系統(tǒng)。
當(dāng)網(wǎng)球進(jìn)入高速旋轉(zhuǎn)的摩擦輪之間,會(huì)受到擠壓與摩擦力的雙重作用,被迅速加速并精準(zhǔn)發(fā)射。該設(shè)計(jì)不僅結(jié)構(gòu)簡(jiǎn)單可靠,還能精準(zhǔn)控制發(fā)球頻率與速度,確保網(wǎng)球發(fā)射的穩(wěn)定性,為訓(xùn)練者提供多樣化、可調(diào)節(jié)的發(fā)球模式,助力高效訓(xùn)練!
3.2.5雷達(dá)三維建圖:精準(zhǔn)感知,智能導(dǎo)航
本項(xiàng)目采用3D激光雷達(dá)進(jìn)行數(shù)據(jù)采集,通過(guò)特征點(diǎn)掃描匹配與非線性優(yōu)化精確估算機(jī)器人運(yùn)動(dòng)狀態(tài)。
激光里程計(jì)的輸出數(shù)據(jù)與地圖實(shí)時(shí)匹配,包括直線匹配與平面匹配,確保機(jī)器人精準(zhǔn)定位,無(wú)需額外回環(huán)檢測(cè),助力高效智能導(dǎo)航!
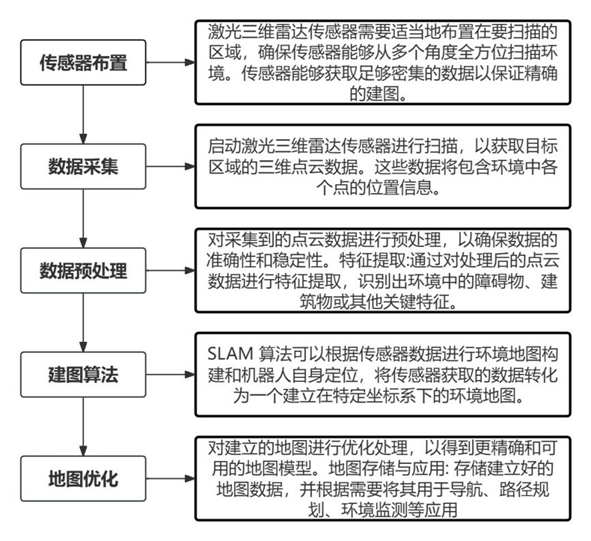
激光三維雷達(dá)建圖:精準(zhǔn)感知,全景探索
1??傳感器布置:合理安裝3D激光雷達(dá),確保從多個(gè)角度全方位掃描環(huán)境,采集高精度數(shù)據(jù)。
2??數(shù)據(jù)采集:?jiǎn)?dòng)雷達(dá),獲取目標(biāo)區(qū)域的三維點(diǎn)云數(shù)據(jù),記錄環(huán)境中每個(gè)點(diǎn)的精確位置。
3??數(shù)據(jù)預(yù)處理:對(duì)點(diǎn)云數(shù)據(jù)進(jìn)行清理和優(yōu)化,提取關(guān)鍵特征,如障礙物、建筑物等,確保信息清晰。
4??建圖算法:利用SLAM技術(shù),將傳感器數(shù)據(jù)轉(zhuǎn)化為高精度環(huán)境地圖,同時(shí)實(shí)現(xiàn)機(jī)器人精準(zhǔn)定位。
5??地圖優(yōu)化與應(yīng)用:優(yōu)化地圖精度,存儲(chǔ)數(shù)據(jù),并用于導(dǎo)航、路徑規(guī)劃、環(huán)境監(jiān)測(cè)等智能任務(wù),讓機(jī)器人行動(dòng)更高效!
四、功能設(shè)計(jì)
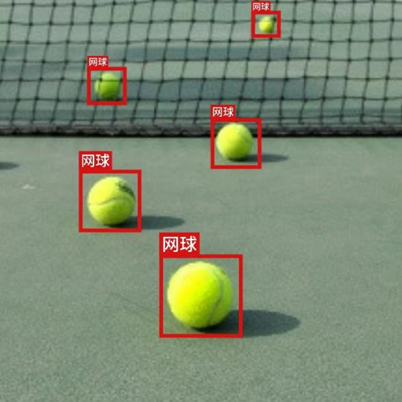
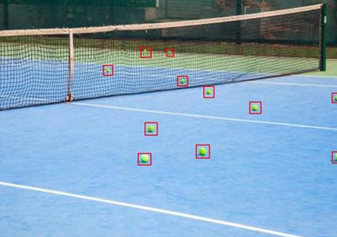
4.1網(wǎng)球識(shí)別:YOLOv5讓捕捉高速網(wǎng)球更精準(zhǔn)
利用YOLOv5進(jìn)行網(wǎng)球識(shí)別,是深度學(xué)習(xí)與計(jì)算機(jī)視覺(jué)的強(qiáng)強(qiáng)結(jié)合,能夠精準(zhǔn)鎖定網(wǎng)球位置,即便是高速飛行的球也能輕松捕捉。整個(gè)流程涵蓋數(shù)據(jù)準(zhǔn)備、環(huán)境配置、模型訓(xùn)練、優(yōu)化調(diào)整及效果評(píng)估,確保識(shí)別高效、精準(zhǔn)。
?數(shù)據(jù)準(zhǔn)備:多樣化的數(shù)據(jù)集是訓(xùn)練高性能模型的關(guān)鍵。涵蓋不同運(yùn)動(dòng)場(chǎng)景、光照條件、軌跡變化的數(shù)據(jù),能讓模型適應(yīng)各種復(fù)雜情況,提升泛化能力。
?環(huán)境配置:選用合適的硬件設(shè)備、深度學(xué)習(xí)框架及優(yōu)化工具,確保訓(xùn)練過(guò)程高效流暢,發(fā)揮最大計(jì)算性能。
?模型訓(xùn)練:通過(guò)調(diào)整超參數(shù)、優(yōu)化損失函數(shù)、數(shù)據(jù)增強(qiáng)等手段,使模型深度學(xué)習(xí)網(wǎng)球特征,提升識(shí)別精度。
?優(yōu)化與評(píng)估:不斷調(diào)整網(wǎng)絡(luò)結(jié)構(gòu)、優(yōu)化超參數(shù)、測(cè)試多種數(shù)據(jù)集,確保識(shí)別的準(zhǔn)確性和穩(wěn)定性,優(yōu)化實(shí)際應(yīng)用效果。
YOLOv5以高幀率處理能力見(jiàn)長(zhǎng),能精準(zhǔn)適應(yīng)多場(chǎng)景需求,為體育賽事、智能訓(xùn)練等提供強(qiáng)大的技術(shù)支撐,讓網(wǎng)球識(shí)別更加智能高效
4.2雙控制模式
雙控制模式包括自動(dòng)模式和手動(dòng)模式,讓機(jī)器人既能自動(dòng)執(zhí)行任務(wù),也能在需要時(shí)由人工控制。
- 自動(dòng)模式:機(jī)器人使用全局遍歷算法自動(dòng)掃場(chǎng),通過(guò)攝像頭和超聲波傳感器獲取場(chǎng)地信息,避開(kāi)運(yùn)動(dòng)員和障礙物,確保不干擾訓(xùn)練,且能覆蓋整個(gè)網(wǎng)球場(chǎng),保證網(wǎng)球的完全收集。
- 手動(dòng)模式:使用遙控器控制機(jī)器人,在復(fù)雜區(qū)域或遇到意外時(shí)進(jìn)行干預(yù)調(diào)整。控制器通過(guò)NRF模塊和Barsa板,提高在干擾環(huán)境中的穩(wěn)定性和靈活性。
4.3多模式發(fā)球
該發(fā)球模塊支持上旋、下旋、側(cè)旋等多種發(fā)球方式,并可調(diào)節(jié)摩擦輪速度和速度差,以改變球的弧線和頻率,實(shí)現(xiàn)可控的發(fā)球落點(diǎn)和個(gè)性化發(fā)球。
通過(guò)壓電加速度傳感器,系統(tǒng)獲取并處理網(wǎng)球的落點(diǎn)信號(hào),確保準(zhǔn)確性并實(shí)現(xiàn)定點(diǎn)發(fā)球。此設(shè)計(jì)讓球員能精確控制發(fā)球的旋轉(zhuǎn)和落點(diǎn),提高訓(xùn)練與比賽中的技術(shù)水平與戰(zhàn)術(shù)應(yīng)變能力。
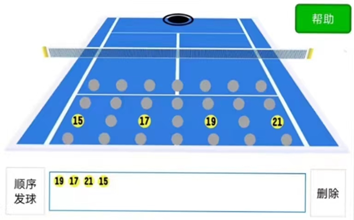
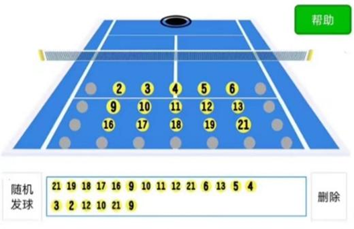
4.3.1定點(diǎn)順序發(fā)球
球員可從28個(gè)發(fā)球定位點(diǎn)中選擇,并按順序安排這些點(diǎn),使發(fā)球模塊依次執(zhí)行。此系統(tǒng)增強(qiáng)了發(fā)球的靈活性和戰(zhàn)術(shù)性,為訓(xùn)練和比賽增添變化與挑戰(zhàn),有助于提升球員的技術(shù)和應(yīng)變能力。
4.3.2定點(diǎn)隨機(jī)發(fā)球
用戶可以從28個(gè)發(fā)球點(diǎn)中選擇目標(biāo),并讓系統(tǒng)隨機(jī)選擇發(fā)球點(diǎn)位進(jìn)行發(fā)球。此系統(tǒng)模擬比賽中的多變發(fā)球場(chǎng)景,幫助球員提升應(yīng)對(duì)不同發(fā)球方向和旋轉(zhuǎn)的能力。通過(guò)隨機(jī)發(fā)球,訓(xùn)練更加多樣化和有趣,促進(jìn)發(fā)球技術(shù)和應(yīng)變能力的提高。
此外,教練可以根據(jù)球員需求設(shè)置不同的隨機(jī)發(fā)球方案,提升訓(xùn)練效果,幫助球員更好地適應(yīng)比賽中的挑戰(zhàn),并激發(fā)他們的學(xué)習(xí)動(dòng)力。
4.3.3自定義發(fā)球
這款智能發(fā)球機(jī)支持手機(jī)端調(diào)節(jié)發(fā)球的力度、弧度、轉(zhuǎn)速和頻率等參數(shù)。用戶通過(guò)手機(jī)輕松控制,無(wú)需專業(yè)調(diào)試,節(jié)省時(shí)間和人力。手機(jī)端控制不僅提高了操作便利性,還能根據(jù)個(gè)人需求快速調(diào)整發(fā)球設(shè)置,提升訓(xùn)練和比賽準(zhǔn)備效率。此創(chuàng)新的智能控制方式使訓(xùn)練更加個(gè)性化,增強(qiáng)了用戶體驗(yàn)并提供了更多訓(xùn)練選擇。
4.3.4 PCB制版技術(shù)
本團(tuán)隊(duì)設(shè)計(jì)并制作了輪式機(jī)器人遙控器的PCB電路,顯著提高了電路的穩(wěn)定性、安全性和集成度。自制的電路使遙控器更小巧、易于維護(hù),并優(yōu)化了能效管理。這提升了產(chǎn)品的可靠性和用戶體驗(yàn),減少了學(xué)習(xí)電路知識(shí)的需求,為用戶提供了更高效、更穩(wěn)定的操作體驗(yàn)。
4.3.5半場(chǎng)裁判車
功能:
監(jiān)督比賽: 負(fù)責(zé)確保比賽有序進(jìn)行,運(yùn)動(dòng)員遵守規(guī)則和裁判判決。
裁決比賽局: 負(fù)責(zé)判斷球員動(dòng)作,如球是否出界或犯規(guī)等。
記錄比分: 記錄每一局的比分,確保準(zhǔn)確性。
做法:
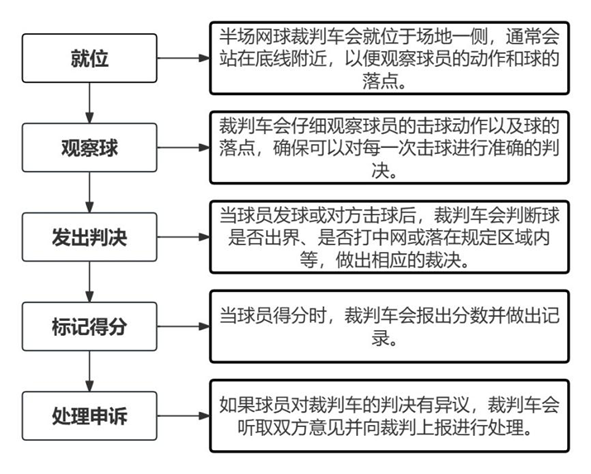
就位: 裁判車通常位于底線附近,方便觀察球員動(dòng)作和球的落點(diǎn)。
觀察球: 觀察球員擊球和球的落點(diǎn),確保做出準(zhǔn)確判決。
發(fā)出判決: 判斷球是否出界、打中網(wǎng)等,做出相應(yīng)裁決。
標(biāo)記得分: 報(bào)出分?jǐn)?shù)并記錄。
處理申訴: 如果球員有異議,裁判車會(huì)向上級(jí)裁判報(bào)告并處理。
半場(chǎng)裁判車通過(guò)準(zhǔn)確裁決和記錄,為比賽提供公平、公正的環(huán)境。
五、系統(tǒng)實(shí)現(xiàn)
5.1系統(tǒng)總架構(gòu)
本系統(tǒng)采用本地開(kāi)發(fā)與云端監(jiān)控結(jié)合的軟硬件集成方案。感知層使用地平線攝像頭模組、超聲波雷達(dá)和三維雷達(dá)建圖模組,實(shí)現(xiàn)自動(dòng)駕駛和網(wǎng)球掉落監(jiān)測(cè),確保迅速撿起網(wǎng)球。控制層采用RDK X3主控,處理采集到的數(shù)據(jù)。該方案提升了系統(tǒng)智能化水平,增強(qiáng)了自動(dòng)駕駛精度和可靠性,確保高效、安全的網(wǎng)球撿拾操作。
5.2軟件開(kāi)發(fā)應(yīng)用
5.2.1掉落網(wǎng)球識(shí)別模型
為解決網(wǎng)球在不同光照下的顏色變化問(wèn)題,本項(xiàng)目采用OpenCV中的HSV顏色空間進(jìn)行圖像處理。由于網(wǎng)球在BGR顏色空間下顏色不均,難以準(zhǔn)確分割,HSV顏色空間提供了更好的解決方案。HSV使用三個(gè)參數(shù)表示顏色:
色調(diào)(Hue):表示顏色的種類,用角度度量,范圍為0°到360°。在OpenCV中,范圍為0至180,0°為紅色,120°為綠色,240°為藍(lán)色。
飽和度(Saturation):表示顏色接近光譜色的程度,范圍為0至255。值越大,顏色越飽和,越接近原色;值越小,顏色越接近白色。
明度(Value):表示顏色的亮度,范圍從0(黑色)到255(白色)。值越大,顏色越明亮。
在HSV顏色空間中,網(wǎng)球的色調(diào)集中在某個(gè)狹窄的區(qū)間。通過(guò)保留這一色調(diào)區(qū)間,并調(diào)整飽和度和明度,能夠從圖像中準(zhǔn)確提取出網(wǎng)球。通過(guò)這種方法,可以有效應(yīng)對(duì)光照變化,提升網(wǎng)球識(shí)別的準(zhǔn)確性。
5.2.2輪式機(jī)器人的姿態(tài)控制
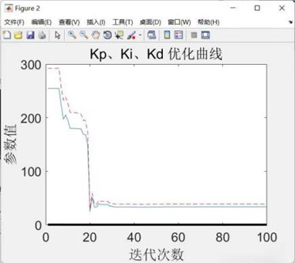
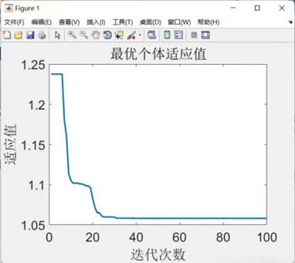
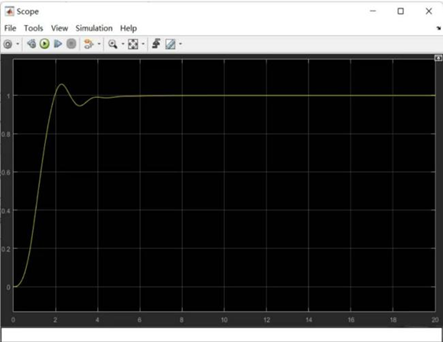
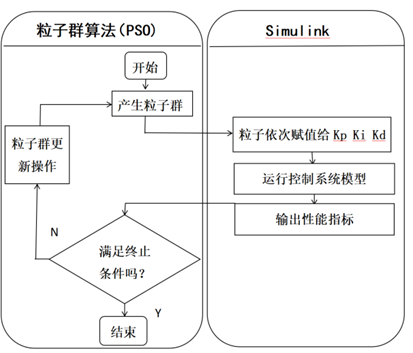
在姿態(tài)控制中,粒子群算法(PSO)與Simulink模型之間的連接通過(guò)粒子(PID控制器的參數(shù))和對(duì)應(yīng)的適應(yīng)值(控制系統(tǒng)的性能指標(biāo))來(lái)實(shí)現(xiàn)。優(yōu)化過(guò)程如下:
PSO生成粒子群,粒子可以是初始化的或更新后的。
將每個(gè)粒子的參數(shù)(Kp、Ki、Kd)傳遞給PID控制器。
使用Simulink模型運(yùn)行控制器,得到對(duì)應(yīng)的性能指標(biāo)。
該性能指標(biāo)反饋到PSO,作為粒子的適應(yīng)值。
判斷是否滿足退出條件,若滿足,則結(jié)束優(yōu)化。
這一過(guò)程通過(guò)不斷優(yōu)化PID控制器的參數(shù),提升輪式機(jī)器人的姿態(tài)控制性能。
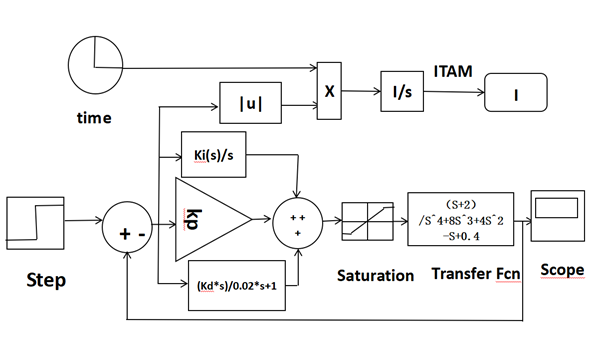
粒子群算法中速度和位置是根據(jù)下面兩個(gè)公式進(jìn)行更新

其中,x表示粒子的位置;v表示粒子的速度;ω為慣性因子;c1、c2為加速度常數(shù);r1、r2為[0,1]區(qū)間的隨機(jī)數(shù);Pt是粒子迄今為止搜索到的最優(yōu)為止;Gt是整個(gè)粒子群迄今為止搜索到的最優(yōu)為止。
PSO的流程如下:
1.初始化粒子群,隨機(jī)產(chǎn)生所有粒子的位置和速度,并確定粒子的Pt和Gt。
2.對(duì)每個(gè)粒子,將其適應(yīng)值與該粒子所經(jīng)歷過(guò)的最優(yōu)位置Pt的適應(yīng)值進(jìn)行比較,若較好,則將其作為當(dāng)前的Pt。
3.對(duì)每個(gè)粒子,將其適應(yīng)值與整個(gè)粒子群所經(jīng)歷過(guò)的最優(yōu)位置Gt的適應(yīng)值進(jìn)行比較,若較好,則將其作為當(dāng)前的Gt。
4.按照上面的公式進(jìn)行速度和位置的更新。
5.如果沒(méi)有滿足終止條件(通常為預(yù)設(shè)的最大迭代次數(shù)和適應(yīng)值下限值),則返回步驟2;否則,推出算法,得到最優(yōu)解。
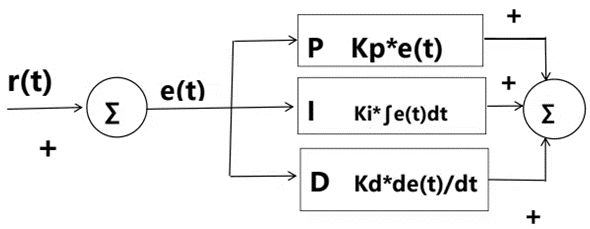
由公式可知:通過(guò)姿態(tài)和速度傳感器測(cè)量到實(shí)時(shí)數(shù)據(jù)后,通過(guò)當(dāng)前測(cè)量數(shù)據(jù)和上一次測(cè)量數(shù)據(jù)計(jì)算出誤差,給定一定大小KP(比例),KI(積分),KD(微分)三個(gè)影響因子的值,引入速度環(huán)和位置環(huán),利用串級(jí)PID實(shí)時(shí)調(diào)整車輛姿態(tài),使車輛在一定空間內(nèi)趨于相對(duì)平穩(wěn)的狀態(tài)。
舉例說(shuō)明:在自動(dòng)駕駛中引入PID的好處在于,使用常規(guī)開(kāi)環(huán)手段控制機(jī)器人時(shí),當(dāng)檢測(cè)到網(wǎng)球前方有障礙物機(jī)器人要進(jìn)行轉(zhuǎn)向時(shí),會(huì)由于速度,障礙物距離等因素發(fā)生轉(zhuǎn)向過(guò)沖現(xiàn)象,往往發(fā)生這種現(xiàn)象的結(jié)果是致命的,極有可能影響其他運(yùn)動(dòng)員的活動(dòng),引發(fā)事故。引入PID閉環(huán)控制后,在發(fā)生此類現(xiàn)象后,KD因子發(fā)揮作用,抑制過(guò)沖現(xiàn)象,并在縱向?qū)用媾浜蟁BF神經(jīng)網(wǎng)絡(luò)瞬時(shí)降低車速和規(guī)劃路徑,從而避免危險(xiǎn)發(fā)生。代碼如下:
- import time
- classPIDController:
- definit(self, Kp, Ki, Kd, setpoint):
- self.Kp = Kp
- self.Ki = Ki
- self.Kd = Kd
- self.setpoint = setpoint
- self.error =0
- self.integral =0
- self.derivative =0
- self.last_error =0
- defupdate(self, feedback_value):
- self.error =self.setpoint - feedback_value
- self.integral +=self.error
- self.derivative =self.error -self.last_error
- self.last_error =self.error
- return (self.Kp *self.error) + (self.Ki *self.integral) + (self.Kd *self.derivative)
- defget_current_attitude():
- #獲取傳感器數(shù)據(jù)
- #實(shí)際應(yīng)用中,這里應(yīng)返回傳感器測(cè)量的姿態(tài)值
- #例如,可以通過(guò)陀螺儀或加速度計(jì)獲取姿態(tài)角度
- return0 #示例:假設(shè)初始姿態(tài)為0度
- defapply_control_to_robot(control):
- #將控制量應(yīng)用到機(jī)器人
- #實(shí)際應(yīng)用中,這里應(yīng)設(shè)置電機(jī)的轉(zhuǎn)速或功率
- print(f"Applying control: {control}")
- #示例:可以將控制量轉(zhuǎn)換為電機(jī)控制信號(hào)
- #初始化PID控制器
- pid = PIDController(Kp=0.1, Ki=0.01, Kd=0.05, setpoint=90) #設(shè)置PID參數(shù)和期望姿態(tài)
- #主控制循環(huán)
- whileTrue:
- #從傳感器中獲取當(dāng)前姿態(tài)
- feedback_value = get_current_attitude()
- #使用PID計(jì)算控制量
- control = pid.update(feedback_value)
- #應(yīng)用控制量到機(jī)器人
- apply_control_to_robot(control)
- #延時(shí)一段時(shí)間(例如10毫秒),以模擬控制周期
- time.sleep(0.01)
5.2.3輪式機(jī)器人的路徑控制
在路徑規(guī)劃方面,本項(xiàng)目采用蜘蛛蜂優(yōu)化算法(SWO)來(lái)實(shí)現(xiàn)機(jī)器人在復(fù)雜路況下的最優(yōu)行進(jìn)路線。該算法模擬蜘蛛和蜂的行為,通過(guò)蜘蛛的網(wǎng)和蜜蜂的飛行路徑進(jìn)行優(yōu)化搜索,已廣泛應(yīng)用于多個(gè)領(lǐng)域。
在網(wǎng)球場(chǎng)這種復(fù)雜環(huán)境中,傳統(tǒng)路徑規(guī)劃算法難以找到最優(yōu)解,因?yàn)閺?fù)雜的障礙和大規(guī)模的搜索空間容易導(dǎo)致局部最優(yōu)解。SWO算法通過(guò)模擬蜘蛛和蜜蜂的行為,能夠更高效地探索搜索空間,快速找到全局最優(yōu)解。
SWO算法的基本步驟如下:
- 初始化種群:隨機(jī)生成機(jī)器人的初始位置和速度。
- 評(píng)估適應(yīng)度:計(jì)算機(jī)器人的適應(yīng)度值,即路徑規(guī)劃的目標(biāo)函數(shù)值。
- 更新位置和速度:根據(jù)蜘蛛和蜜蜂的行為策略更新機(jī)器人的位置和速度。
- 蜘蛛行為:局部和全局搜索策略更新位置。
- 黃蜂行為:通過(guò)隨機(jī)和精英搜索策略進(jìn)一步更新位置。
- 評(píng)估適應(yīng)度:重新計(jì)算每個(gè)機(jī)器人位置和速度的適應(yīng)度值。
- 更新最優(yōu)解:更新全局最優(yōu)解和個(gè)體最優(yōu)解。
- 終止條件:達(dá)到預(yù)設(shè)的迭代次數(shù)或停止準(zhǔn)則時(shí)終止算法,輸出最優(yōu)解。
這種算法相較于遺傳算法和粒子群算法,具有更強(qiáng)的全局搜索能力和更快的優(yōu)化速度,能有效提升機(jī)器人在復(fù)雜環(huán)境下的路徑規(guī)劃效率。
5.2.4定位系統(tǒng)
輪式機(jī)器人通過(guò)定位模塊ATGM332DR準(zhǔn)確獲得自己當(dāng)前的位置,上位機(jī)將目標(biāo)坐標(biāo)通過(guò)數(shù)傳模塊發(fā)送給云平臺(tái),再由云平臺(tái)將各類信息下發(fā)至APP或PC端。
- 定位模塊
ATGM332DR是雙模混合定位模塊,可以實(shí)現(xiàn)GPS定位和北斗定位。其定位精度強(qiáng),準(zhǔn)度高,可以實(shí)現(xiàn)分米級(jí)的定位。
(2)數(shù)傳模塊
數(shù)傳模塊ATK-LORA-01是LORA無(wú)線串口模塊,基于擴(kuò)頻技術(shù)的超遠(yuǎn)距離無(wú)線傳輸方案,具有傳輸距離遠(yuǎn),工作功耗低等特點(diǎn),其優(yōu)勢(shì)如下:
支持定點(diǎn)發(fā)射,支持省電模式,支持廣播和監(jiān)聽(tīng)功能,支持6級(jí)可調(diào)空中速率,支持AT指令控制,配置靈活。
5.3硬件應(yīng)用
主控采用RDK X3,搭載MPU6050陀螺儀、HC-SR04超聲波模塊等外設(shè),實(shí)現(xiàn)對(duì)掉落網(wǎng)球的檢測(cè)、記錄反饋以及復(fù)雜路段的自由運(yùn)動(dòng)。
遙控器主控使用ESP32模組,MPU6050進(jìn)行動(dòng)作識(shí)別,搖桿電位器控制小車姿態(tài),OLED顯示運(yùn)行參數(shù)。遙控器主要由以下部分組成:
- 外殼:保護(hù)內(nèi)部電路和元件。
- 按鍵/按鈕:控制設(shè)備功能,如開(kāi)關(guān)、方向等。
- 顯示屏:顯示設(shè)備狀態(tài)、菜單選項(xiàng)等信息。
- 指示燈:顯示電源、連接狀態(tài)等。
- 電池倉(cāng):用于電池供電,方便更換。
- 無(wú)線通信模塊:通過(guò)射頻等技術(shù)與設(shè)備進(jìn)行通信。
- 電子電路板:連接按鍵、無(wú)線模塊等電子元件,處理操作指令。
5.3.1攝像頭模組
使用RDK X3電路板進(jìn)行網(wǎng)球識(shí)別與回傳。識(shí)別網(wǎng)球的步驟如下:
- 啟動(dòng)識(shí)別程序:?jiǎn)?dòng)RDK X3的視覺(jué)系統(tǒng),用于檢測(cè)和跟蹤網(wǎng)球。
- 初始化攝像頭:確保攝像頭正確初始化,以捕捉周圍環(huán)境圖像。
- 網(wǎng)球檢測(cè):RDK X3使用卷積神經(jīng)網(wǎng)絡(luò)識(shí)別網(wǎng)球。
- 跟蹤網(wǎng)球:檢測(cè)到網(wǎng)球后,啟用跟蹤算法追蹤網(wǎng)球的移動(dòng)。
- 反饋:根據(jù)網(wǎng)球的位置和運(yùn)動(dòng),提供反饋。
- 執(zhí)行任務(wù):根據(jù)網(wǎng)球的位置和軌跡執(zhí)行任務(wù),如撿球、回傳等。
- 結(jié)束識(shí)別程序:任務(wù)完成后,停止程序,進(jìn)入待機(jī)狀態(tài)。
5.3.2 RDK X3:小車運(yùn)動(dòng)的主控
RDK X3是一款模塊化開(kāi)發(fā)板,用于機(jī)器人控制、感知、定位和規(guī)劃等功能。在智能撿球車中,RDK X3負(fù)責(zé)實(shí)現(xiàn)定位、避障和路徑規(guī)劃等功能,通過(guò)傳感器和算法處理,幫助機(jī)器人精確撿拾網(wǎng)球。
RDK X3的作用包括:
- 定位和導(dǎo)航:通過(guò)激光雷達(dá)、攝像頭等傳感器,RDK X3實(shí)現(xiàn)精準(zhǔn)定位和導(dǎo)航,幫助機(jī)器人找到網(wǎng)球。
- 避障和安全:利用傳感器檢測(cè)障礙物,確保機(jī)器人安全撿拾網(wǎng)球。
- 運(yùn)動(dòng)控制:RDK X3實(shí)現(xiàn)精確運(yùn)動(dòng)控制,使機(jī)器人靈活移動(dòng)。
- 數(shù)據(jù)處理和決策:RDK X3處理傳感器數(shù)據(jù),做出決策,調(diào)整撿球策略。
5.3.3北斗和UWB(超寬帶)雙定位模組
北斗定位模塊和UWB定位模塊在定位網(wǎng)球時(shí)發(fā)揮重要作用。
- 北斗定位模塊:基于我國(guó)自主研發(fā)的北斗衛(wèi)星導(dǎo)航系統(tǒng),提供全球范圍的定位服務(wù)。通過(guò)接收衛(wèi)星信號(hào),利用三角定位原理計(jì)算位置信息,支持多頻點(diǎn)、多系統(tǒng)聯(lián)合定位,能夠在復(fù)雜環(huán)境中穩(wěn)定、可靠地提供定位服務(wù)。
- UWB定位模塊:具有高精度、高實(shí)時(shí)性和抗干擾性,尤其適用于隧道等復(fù)雜環(huán)境中的精準(zhǔn)定位。
應(yīng)用:
- 全局定位和場(chǎng)地規(guī)劃:北斗模塊用于室外球場(chǎng)的全球定位,幫助機(jī)器人精確識(shí)別位置,規(guī)劃路徑,確保安全撿球并有效返回發(fā)球位置。
- 精準(zhǔn)室內(nèi)定位和球位置識(shí)別:UWB模塊提供室內(nèi)高精度定位,幫助機(jī)器人準(zhǔn)確識(shí)別網(wǎng)球位置,提升撿球效率。
- 動(dòng)態(tài)避障和交互式撿拾:UWB模塊實(shí)時(shí)感知環(huán)境,避免障礙物,結(jié)合兩種定位技術(shù),機(jī)器人能夠精準(zhǔn)撿拾網(wǎng)球并送回發(fā)球位置。
通過(guò)結(jié)合北斗和UWB雙定位模組,機(jī)器人可實(shí)現(xiàn)高精度定位、路徑規(guī)劃、避障和撿拾
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29664瀏覽量
212470 -
人工智能
+關(guān)注
關(guān)注
1806文章
48960瀏覽量
248590 -
RDK
+關(guān)注
關(guān)注
0文章
26瀏覽量
9207
發(fā)布評(píng)論請(qǐng)先 登錄
RDK X3暴改機(jī)器人:手搓能爬樓的AI快遞員會(huì)爬樓能嘮嗑

RDK X3新玩法:超沉浸下棋機(jī)器人開(kāi)發(fā)日記
算控一體新物種發(fā)布!百TOPS算力,地瓜為具身機(jī)器人量產(chǎn)“夯地基”

盤點(diǎn)#機(jī)器人開(kāi)發(fā)平臺(tái)
并聯(lián)機(jī)器人快速準(zhǔn)確拾取物體
Tennibot全球第一臺(tái)使用計(jì)算機(jī)視覺(jué)和人工智能撿網(wǎng)球機(jī)器人
聯(lián)想樂(lè)檬x3拆解,來(lái)看看是怎么個(gè)黑科技這么關(guān)注
15歲初中女生發(fā)明撿拾乒乓球機(jī)器人,靈感來(lái)源農(nóng)田收割機(jī)
網(wǎng)球場(chǎng)館LED球場(chǎng)照明燈
RDK X3 Module發(fā)布,全新軟硬件平臺(tái)加速實(shí)現(xiàn)量產(chǎn)級(jí)產(chǎn)品落地
全球招募新品體驗(yàn)官 | 30天玩轉(zhuǎn)地平線RDK X3 Module

地平線RDK X3語(yǔ)音算法通過(guò)Alexa ACM方案認(rèn)證

“你的錢來(lái)了”:財(cái)神1號(hào),RDK X3驅(qū)動(dòng),自動(dòng)撿錢不手軟!

地瓜機(jī)器人RDK X5 規(guī)格書與地瓜機(jī)器人RDK X5原理圖
RDK X3 帶飛的智能護(hù)理系統(tǒng):讓機(jī)器人秒變貼心小棉襖






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論